DigiFlow User Guide
Version 4.0, January 2017
© Dalziel Research Partners
2000 – 2017
1 Introduction
DigiFlow provides a range of image processing features
designed specifically for analysing fluid flows. The package is designed to be
easy to use, yet flexible and efficient, and includes a powerful yet flexible
macro language. Whereas most image processing systems are intended for
analysing or processing single images, DigiFlow is designed from the start for
dealing with sequences or collections of images in a straightforward manner.
Before installing or using DigiFlow, please read the Licence
Agreement (see §16) and ensure you have
completed the registration requirements.
1.1 History
The origins of DigiFlow lie in an earlier system by the same
author: DigImage. This earlier system, with its origins in 1988 and first
released commercially in 1992, pioneered many uses of image processing in fluid
dynamics. Utilising its own DOS-extender technology, DigImage existed in the
base 640kB of DOS memory (and later from the command prompt under Windows 3.x
and 9x), accessing around 12MB of extended memory for image storage and
interface with the framegrabber hardware.
To obtain the necessary performance in these early days of
image processing on desktop computers, DigImage required a framegrabber card to
be installed to provide not only image capture, but also image display and some
of the processing. While this close coupling allowed efficient real-time
processing and frame-accurate control of a video recorder, it ultimately
restricted the development and deployment of the technology. The original ISA
bus based Data Translation DT2861 and DT2862 frame grabber cards remained available
until 2001, but by that time suitable motherboards had become difficult to source.
At time of writing (2007) and despite its reliance on outdated technology,
DigImage is still used in many laboratories around the world.
The development of DigiFlow began in 1994, although the
project had a number of false starts and development put on hold a number of
times due to other commitments. The code of this version has its origins in
1997 as part of the development of synthetic schlieren (see §5.6.4). The computational and resolution requirements for
synthetic schlieren could not be accommodated efficiently within the framework
of DigImage.
Despite sharing many approaches, algorithms and techniques,
DigiFlow does not re-use any of DigImage’s 8Mbytes Fortran 77 and 2MB Assembler
source code. The design goals for power, flexibility and efficiency in DigiFlow
could only be achieved by starting again from scratch.
DigiFlow builds on experience with DigImage from the user
view point to provide a more powerful, more flexible, but simpler interface. It
also builds on the programming experience to provide a more flexible, powerful
and maintainable code base (now in excess of 15MB of source).
A central feature of DigiFlow is a powerful macro language (dfc) and interpreter.
This provides users with an efficient and flexible environment in which to
automate and customise processing, as well as proving to be a very useful
general computational and plotting tool.
Versions of DigiFlow have been in use in Cambridge since
2000, and at other selected laboratories since 2002. Its wider dissemination
began in late 2003 with a series of beta releases. The first commercial release
(version 1.0) dates from February 2005, with parallel processing and other technologies
providing substantial speed increases being introduced with version 2.0 during
2007. Version 3.0, released in 2008, provides further performance improvements
plus a wealth of new processing features.
1.2 Key features
DigiFlow has been designed from the outset to provide a powerful
yet efficient environment for acquiring and processing a broad range of
experimental flows to obtain both accurate quantitative and qualitative output.
Central to design philosophy is the idea that an image
stream may be processed as simply as a single image. Image streams may consist
of a sequence of images (e.g. from a ‘movie’), or a collection of images
related in some other manner.
Efficiency is obtained through the use of advanced
algorithms (many of them unique to DigiFlow/DigImage) for built in processing
options.
Power and flexibility are obtained through an advanced fully
integrated macro interpreter (using DigiFlow’s dfc macro language) providing a similar
level of functionality to industry standard applications such as MatLab. This interpreter is available to the user either to directly run macros, or as
part of the various DigiFlow tools to allow more flexible and creative use.
Commercial versions of DigiFlow include additional features such as partial
compilation to further improve performance.
Although not an essential component, DigiFlow retains the
potential DigImage released by the control of a framegrabber. Not only does
this greatly simplify the process of running experiments, acquiring images,
processing them, extracting and plotting data, but it also enables real-time
processing of particle streaks and synthetic schlieren, for example.
1.3 User guide
This User Guide is designed to provide the primary reference
for DigiFlow. The User Guide is supplied in both .html and .pdf formats and is linked to the help
system within DigiFlow. Pressing the F1 function key within DigiFlow will start a web browser
and take you to the most appropriate point in the .html version of the User Guide.
The User Guide is not in itself complete: detailed
descriptions of the many functions provided by the macro interpreter may be
found in the interactive help system (Help: dfc Functions). The User Guide is also
supplemented by a variety of scientific publications that expand on some of the
underlying technologies.
The typographical convention used in the User Guide is
described below:
|
Typography
|
Description
|
|
Analyse
|
Windows elements such as prompts, menu items and dialogs.
|
|
Expt_A.dfi
|
File names, etc.
|
|
read_image()
|
Interpreter commands and functions.
|
|
:=
|
Interpreter operators and syntax.
|
|
"string"
|
Interpreter operators and syntax.
|
|
|
Formal argument names for interpreter functions.
|
|
my_image
|
Variables, numbers, etc., for the interpreter.
|
|
file0
|
Formal argument names for interpreter functions.
|
2 Installation
Although DigiFlow will work on any Windows XP or later
machine, we recommend that you avoid using Windows Vista if possible as the
performance of Vista is significantly worse than either Windows XP or Windows
7. There are versions of DigiFlow that can operate under both 32-bit and 64-bit
implementations, although at present it cannot control a digital video camera
under a 64-bit implementation of Windows.
2.1 Basic
installation
DigiFlow is a typical Windows application with a graphical
user interface, menus, dialog boxes and toolbars. However, unlike many
applications, DigiFlow does not require a special installation procedure, but
can simply be copied to the desired directory. In most cases DigiFlow will be
delivered in a .zip
or self-extracting (.exe)
archive file, downloaded from the web. This should simply be unzipped into your
selected directory. However, to make the best of DigiFlow, there are some additional
settings and tasks to be completed. The setup.bat file that is copied to the
installation folder will help with this process. Refer to GettingStarted.pdf for further details.
The installed part of DigiFlow consists of DigiFlow.exe, which
contains the core functionality, and a range of DLL files that handle specific
menu options. DigiFlow also makes use of various global start-up files stored
in the same directory.
During use, DigiFlow generates two status files in the
directory in which it is started. These are DigiFlow_Status.dfs (§13.5), which contains a range of information describing
the settings, and DigiFlow_Dialogs.dfs
(§13.4), which records your last responses to many
of the prompts, etc. By storing this information in the directory in
which DigiFlow is started, DigiFlow is able to keep a separate set of
information for each user, or for each specific task, without polluting the
registry. Additionally, these status files can be deleted or moved as the user
wishes. In some circumstances, DigiFlow_Status.dfs
may become corrupted. If DigiFlow fails to start, or exhibits unexpected
behaviour, you should try removing (or renaming) DigiFlow_Status.dfs to see if this cures
the problem.
It is recommended that you use a new directory for each new
set of experiments and for each new project. In this way the DigiFlow strategy
of storing localised status files will facilitate use of DigiFlow in the
various different contexts. In such an environment it is frequently most
convenient to start DigiFlow from the command prompt within the appropriate
directory structure, although other strategies such as multiple shortcuts or
setting up associations for Windows Explorer are also possible.
If you wish to run DigiFlow from a command prompt (strongly
recommended), it is worth putting this directory on the path so that DigiFlow
may be started by simply typing DigiFlow at the prompt (DigiFlow will normally add itself
to the search path the first time it is run to enable this). If you prefer to
start DigiFlow from the desktop or start menu, you will need to create a
shortcut at that point and set the Start in directory appropriately. It is strongly
recommended that you do not run DigiFlow from the directory in which the
program resides, exept during the set-up procedure.
2.2 DigiFlow
onfiguration
Details of the basic setup and configuration of DigiFlow
under Windows is covered in GettingStarted.pdf.
This section reiterates some of the key points and highlights other
considerations that may facilitate your use of DigiFlow. Note that DigiFlow can
also be installed to run under Wine on a Linux machine, although it is not
possible to control a digital video camera and .eps (Encapsulated PostScript) files do
not have access to the normal range of fonts and appear visually less
satisfying.
2.2.1 Basic
configuration
Specification of the file extension for file names within
DigiFlow is mandatory in most circumstances as DigiFlow utilises this extension
to determine the file type for output. However, by default, Windows XP and
later hide the extensions to files of known types, a feature that can cause
problems with DigiFlow. We recommend, therefore, that you turn off this
feature. DigiFlow will attempt to do this for itself, but this may not work on
some systems. If DigiFlow does not make all extensions visible automatically,
then you may achieve this manually through the View tab of Tools: Folder Options under Windows Explorer.
Simply remove the check mark from Hide extensions for known file types. Note that this will
need to be done for each DigiFlow user.
By default, DigiFlow will not be associated with any file
types or extensions, unless you install it using setup.bat (in which case .dfc, .dfd, .dfi, .dfm, .dfs and .dft will be
associated with DigiFlow). The easy way to make or add such associations is to
right-click on a file with such an association then select Open with (or Open if Open with is not visible) and choose the
default program from the Open
With dialog and check the Always use… box. If DigiFlow is not
listed in this dialog, then locate it using the Browse button.

Figure 1: The Open With dialog for selecting the default program.
We recommend that the following extensions are associated
with DigiFlow on all installations: .dfc, .dfd,
.dfi, .dft and .dfs. You may also
wish to set up associations for other standard image formats such as .bmp, .tif, .png and .jpg.
2.2.2 Encapsulated PostScript configuration
DigiFlow can create Encapsulated PostScript (.eps) files from image
and graphical output for incorporation into documents in packages such as LaTeX
and Word. This can be achieved either through DigiFlow’s inbuilt .eps facility, or
using a Windows printer driver. The former is restricted to bit images (or a
rasterised version of graphics), whereas the latter can produce both bit image
and vector graphics.
By default, DigiFlow searches for a printer named EPS to use to create
the .eps files.
Creation of this printer is relatively straight forwards. Start the Add Printer Wizard
from the Printers and faxes
window, selecting Local
printer attached to this computer and using the File: (print to file)
port. Select a PostScript printer driver (we recommend the HP C LaserJet 4500-PS
if you are using Windows XP, or the Xerox Phaser 6120 PS if you are using
Windows 7) and name the printer “EPS”. (You do not want to make this the
default printer, you may, however, wish to share the printer to simplify the
setting up of further machines.) For Windows Vista, it is recommended that you
download an Adobe PostScript driver from www.adobe.com
as some of the drivers distributed with Windows Vista format their PostScript
in a manner that inhibits the use of LaTeX packages such as psfrag.
Once the wizard has finished, right-click on the new EPS printer and select
Printing preferences.
Click on the Advanced
button expand Document Options
and PostScript Options
within it. Under PostScript
Output Option select Encapsulated PostScript (EPS), as indicated in figure 2.
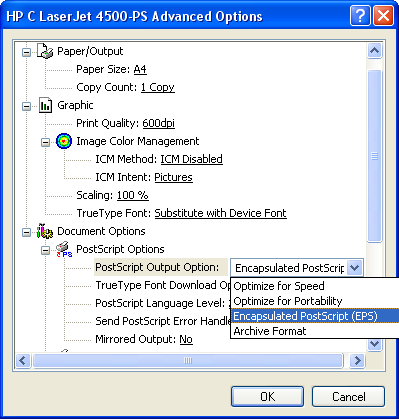
Figure 2: Encapsulated
PostScript (.eps)
printer setup.
Note: if you are using Remote Desktop to access the computer
with DigiFlow installed, you are best to disable the feature making local
printers available to the remote session as this can cause problems if the EPS
printer exists on your local machine.
DigiFlow cannot itself read back in an Encapsulated
PostScript file it produces. However, if DigiFlow detects that GhostScript is
installed on the machine, then DigiFlow will attempt to use GhostScript to help
it load the .eps
file in an appropriate format. For this to be achieved, then GhostScript must
be on the system PATH
and the GS_LIB
environment variable must be set up to point to the GhostScript libraries.
Note that GhostScript is not distributed with or required
by DigiFlow. Use of GhostScript is governed entirely by the licence of that
product and not by the DigiFlow Licence.
2.2.3
Additional memory
The maximum linear address range under 32 bit Windows is 32
bits or 4GB. By default under Windows this is subdivided into two ranges for
each process. The first 2GB of memory is for the process’s own use, while the
second is for the operating system. Although 2GB superficially appears a lot,
there are times when it would be useful to have more. (At the time Windows was
designed, 2GB was considered a good approximation to an unlimited memory
resource, but things have moved on…) With Windows XP and later it is possible
to change the 50:50 default split to reserve 3GB for processes, restricting the
system. Not all software, particularly some drivers, support this extension.
DigiFlow, however, is able to and so if you start running low on virtual
memory, it may be worth a try.
To install the 3GB process memory option, select System Properties
(right click on My Computer
and select Properties)
then the Advanced
tab. Click the Startup and
Recovery Settings button, then the Edit button to open NotePad to make the necessary changes.
Note that you need to have Administrative access rights to be able to do this.


Figure 3: Dialogs
for setting the /3GB
option to increase available virtual memory.
NotePad
will allow you to edit the boot.ini
file that controls the startup of Windows. Typically, this will look like
[boot loader]
timeout=30
default=multi(0)disk(0)rdisk(0)partition(1)\WINDOWS
[operating systems]
multi(0)disk(0)rdisk(0)partition(1)\WINDOWS="Microsoft
Windows XP Professional" /noexecute=optin /fastdetect
To enable the 3GB option, you need to add the /3GB switch to
the end of the line specifying Windows startup. It is best to do this by adding
an additional startup option so that you can boot your machine in either
standard 2GB or 3GB modes. The resulting boot.ini should look something like
this:
[boot loader]
timeout=30
default=multi(0)disk(0)rdisk(0)partition(1)\WINDOWS
[operating systems]
multi(0)disk(0)rdisk(0)partition(1)\WINDOWS="Microsoft
Windows XP Professional" /noexecute=optin /fastdetect
multi(0)disk(0)rdisk(0)partition(1)\WINDOWS="Microsoft
Windows XP Professional (3GB)" /noexecute=optin /fastdetect /3GB
Note that the order of these two lines determines
whether the default boot is 2GB or 3GB. In the above example, the standard 2GB
boot is the default. Reverse the order of the two lines to make the 3GB boot
the default.
2.3
Installation with framegrabber
If you are installing DigiFlow in a machine equipped with a
BitFlow R2, R3, R64 or R64e series framegrabber then some additional steps are
required. These require administrative access to implement.
2.3.1
Framegrabber installation
The framegrabber should be installed and tested using the
BitFlow installation procedure. You will require the BitFlow drivers for
version 5.00, 5.20 or 5.30. Later versions may also be supported (contact
Dalziel Research Partners for details). You should note that on some systems
the BitFlow installation procedure can hang; if this occurs, try installing
after rebooting Windows in Safe Mode.
The BitFlow framegrabber requires a configuration file (.cam, .rcl or .r64) for the camera
being used. Configuration files for cameras known to work with DigiFlow may be
found at http://www.dalzielresearch.com/digiflow/cameras/.
If you have a multi-user system where most users do not have
administrative access, we recommend that you change the permissions on the
BitFlow software to allow all users to change the camera configuration file if
and when they need to. This is achieved using the Registry Editor (regedit.exe;
accessible from the command prompt) to adjust the permissions on all keys in
the registry relating to ‘BitFlow’ by adding the ‘Authenticated Users’ security
principle with ‘Full control’. Failure to do this would mean that only users
with administrative access could change the camera configuration.
2.3.2
Camera configuration
DigiFlow requires information over and above what is
provided in the configuration file for the framegrabber card. This additional
information about the camera capabilities and users preferences is stored in DigiFlow_Cameras.dfc;
consult §13.3 for details of the format of this
file. Cameras not listed in this file have not been tested, although there is a
reasonable chance that all that is required (for a camera supported by the BitFlow
frame grabber) is the addition of appropriate entries, provided a suitable
camera configuration file is also available for the BitFlow framegrabber.
Please contact Dalziel Research Partners if you require any help or guidance
with this.
2.3.3
Local security policy
In the ‘Local security policy’ (found in the ‘Administrative
tools’ section of the ‘Control Panel’), open the ‘Local Policies: User Rights
Assignment’ option. You need to add permission for all DigiFlow users to the
following items:
·
Adjust memory quotas for a process
·
Increase scheduling priority
·
Lock pages in memory
It is suggested that you do this by giving full control
to ‘Authenticated users’
These adjustments are necessary to ensure that DigiFlow is
able to manage the machine performance adequately to ensure trouble-free
capture.
2.3.4
Video capture configuration
It is strongly recommended that video capture is to a disk
other than that containing the operating system in order to obtain adequate
performance. The necessary disk system bandwidth may be in excess of 240MB/s in
some cases (e.g. with a Dalsa 4M60 camera), thus requiring a Mode 0 RAID
array, or using Windows to ‘stripe’ across multiple disks. However, for most
cameras 40MB/s is sufficient and this may be achieved via a fast IDE or SATA disk
(but not the one the operating system is on!).
The capture process in DigiFlow can be configured in two
ways. Either you can directly specify the capture file and location each time
(risking the user specifying a disk system with insufficient bandwidth), or
setting up DigiFlow to capture to a fixed location and require the user to
‘review’ (and possibly edit) the sequence in order to copy it into their own
directory space. For multi-user systems, this second is generally preferred as
it allows users to utilise the capture facility like a video recorder while
preventing retention of unwanted video footage.
The default configuration takes the second option, and
assumes that the capture location is V:\Cache\CaptureVideo.dfm. We recommend that you
configure your system so that this directory exists (either by appropriate
naming of the capture disk, or by setting up a share to an appropriate point
and then connecting to it). This directory must not be compressed and must have
full access for all DigiFlow users. Once you have created this directory, you
should run File: Live Video:
Setup (see §5.1.5.3 for further
details) to create the initial V:\Cache\CaptureVideo.dfm.
It is strongly recommended that you do this before writing any other data to
the capture disk. Details on how to change the name or location of the
cache file may be found in 13.2.
It is important that the space
DigiFlow reserves in this file remains as a single contiguous block on the disk
drive. If it becomes fragmented for any reason then, due to the very high data
transfer rates required, DigiFlow may not be able to write to the disk as fast
as data becomes available from the camera and so timing errors may result.
Once created, V:\Cache\CaptureVideo.dfm
will be flagged as Read only
by the operating system (although DigiFlow will still be able to write to it).
The file will not shrink if a smaller sequence is captured, but may grow if one
larger than that specified during File: Live Video: Setup is requested (note that there is
a risk of fragmentation if this occurs). It is important, therefore, that you
go through the review process outlined in §5.1.5.2,
rather than simply copying this file, as in general only a part of the file
will contain valid data.
Consult §13.2 on DigiFlow_LocalData.dfc
should you wish to change the name or location of V:\Cache\CaptureVideo.dfm.
3 Basics
3.1 Starting DigiFlow
It is recommended that you use a new directory for each new
set of experiments and for each new project. In this way the DigiFlow strategy
of storing localised status files will facilitate use of DigiFlow in the
various different contexts. In such an environment it is frequently most
convenient to start DigiFlow from the command prompt (see figure 4) within the appropriate directory structure, although
other strategies such as multiple shortcuts or setting up associations for
Windows Explorer are also possible.
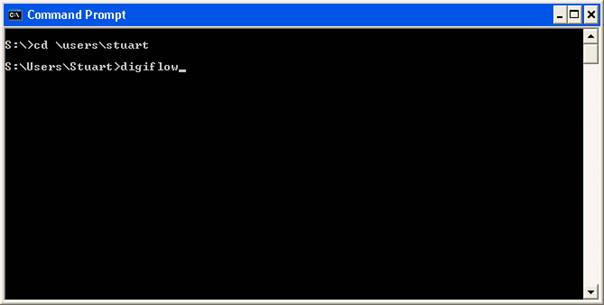
Figure 4:
It is frequently most convenient to start DigiFlow from the command prompt.
If you wish to run DigiFlow from a command prompt (strongly
recommended), it is worth putting this directory on the path so that DigiFlow
may be started by simply typing DigiFlow at the prompt, and placing a shortcut to the
command prompt on the topmost level of the Start button. It is also worth
pinning a shortcut to the command prompt to the start menu (and/or task bar for
Windows 7), and in the properties setting the Start in path to an appropriate
location.
If you are not familiar with the use of the command prompt,
then the following brief list of the most useful commands may be of some value.
|
Command
|
Description
|
|
cd folder
|
Changes to the directory (folder) located within the current
directory.
|
|
cd ..
|
Move up one directory level.
|
|
cd \
|
Move to the topmost (root) directory on the current drive
|
|
dir
|
List all files in the current directory.
|
|
dir *.dfi
|
List all .dfi
files in the current directory.
|
|
dir *.dfc
/s
|
List all dfc
files located either in the current directory, or any subdirectories.
|
|
move file dest
|
Move file to a new directory dest. Can also be used to rename folders.
|
|
copy srce dest
|
Copy the file srce to dest.
|
|
xcopy srce dest
|
A more flexible form of copy.
|
|
xcopy srce dest
/s/d
|
If srce and dest
are directories, then will copy all the files in the directory and any
subdirectories to dest, but only if the srce version is newer. This might be used, for example, as
xcopy
expt\*.dfd results /s/d
to update a collection of DigiFlow drawings (dfd files) in a
results folder.
|
|
ren file new
|
Rename file with the name new.
|
A very useful feature of Windows XP and later is that
the <tab>
key will expand a file name. For example, if you are in a directory that
contains subdirectories named Expt1,
Expt2 and Expt3, then typing cd e followed by <tab> will
expand this to cd Expt1.
Pressing <tab>
a second time will change this to cd Expt2, and so on. To find out more about the commands
available at the command prompt, then search for command prompt in the Window’s Help and
Support Centre and select Using
Command Prompt. Alternatively, if you know the name of the
command but want more details of its options, type the command followed by /? at the command
prompt (see figure 5 for an example).

Figure 5: Help is
available for a command at the command prompt by adding /? after the command.
If you prefer to start DigiFlow directly from the desktop or
start menu, you will need to create a shortcut at that point and set the Start in directory
appropriately (see figure 6). It is strongly
recommended that you do not normally run DigiFlow from the directory in which
the program resides.
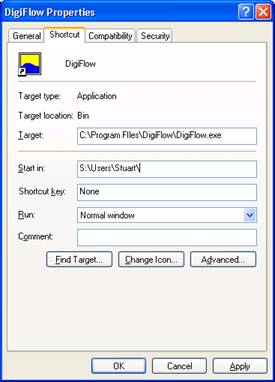
Figure 6:
Properties dialog for a short cut to start DigiFlow.
DigiFlow supports a number of command line arguments. The
most common use is to specify either an image file or movie to be loaded when
DigiFlow starts, or a dfc
file to be run. In both these cases, simply type DigiFlow at a command prompt, followed
by the name of the image file/movie or dfc file.
Additionally, there are a number of command line switches
that can be used in special circumstances. These are given in the following
table.
|
Switch
|
Description
|
|
/?
|
Give the command line options for starting DigiFlow.
|
|
/allowautorun
|
Causes files named _autorun.dfc to be started automatically when they are
created in the current folder. Note that they will be deleted once they have
been run.
|
|
/archive
|
Turns on the .dfa
archive file generation system when not enabled by default.
|
|
/noarchive
|
Turns off the .dfa
archive file generation system.
|
|
/dfa
|
Identical to /archive.
|
|
/autopreprocess
|
Turns on the auto-preprocess mechanism (using .dfb filter files).
|
|
/noautopreprocess
|
Turns off the auto-preprocess mechanism (using .dfb filter files).
|
|
/bitflow:n
|
For machines with more than one BitFlow framegrabber
installed, specifies which board this instance of DigiFlow is to use.
Note: there should be no space between the colon and the number.
|
|
/camera:camerafile
|
Specifies that a particular camera configuration file should
be used rather than the default (specified through the BitFlow SysReg utility.
Note: there should be no space between the colon and the name of the camera
file.
|
|
/camerabuffer:option
|
Specifies the type of buffering to be used for the
capture file. One of: "(default)",
"buffer",
"nobuffer"
or "writethrough".
|
|
/con
|
Start up a conole window at the same time as starting
DigiFlow. (The console window can also be started from dfc code using open_console() or open_file().)
|
|
/debug
|
Turns on all logging options (to DigiFlow.log) for debug purposes.
|
|
/dev
|
Enable certain features related to internal performance
monitoring. Intended for use by the developer.
|
|
/disablewritequeue
|
Disable the threaded writing of images, thus forcing the
process generating the image to wait until the image has been written before
moving on to the next stage.
|
|
/enablewritequeue
|
Enable the threaded writing of images. This speeds up
processing by allowing the process generating the images to proceed to the
next image before the write is complete. Enabled by default.
|
|
/disableparallelwrite
|
Certain aspects of reading and writing images may have
problems if accessed simultaneously by multiple threads. Use of this flag
introduces mutexes (blocks of code where a thread has mutually exclusive
execution) to prevent simultaneous access. This has a detramental impact on
performance.
|
|
/enableparallelwrite
|
Certain aspects of reading and writing images may have
problems if accessed simultaneously by multiple threads. Use of this flag turns
off the mutexes (blocks of code where a thread has mutually exclusive
execution) to prevent simultaneous access. Allowing simultaneous access
improves performance.
|
|
/dpi:n
|
Tells DigiFlow to assume the display has n
pixels per inch. This is used to work out the size of some of the visual
elements in the user interface. Note that including DigiFlow.Options.Display.dpi and DigiFlow.Options.Display.Scaling
in DigiFlow_LocalData.dfc
sets the assumed pixels per inch and scaling (respectively) of the screen.
|
|
/stack:multiple
|
Sets the multiple for stack size allocation. If not specified,
thenthe default multiple is 1.0. This switch can be used in an attempt to
decrease or increase the size of the stack created for separate computational
threads in event of memory problems.
|
|
/timing
|
This turns on a performance timing feature incorporated in
some of the DigiFlow facilities.
|
|
/wine
|
Changes some features to improve performance when running
DigiFlow under Wine on Linux.
|
The final option for starting DigiFlow is to double-click in
Windows Explorer on a file associated with DigiFlow.
3.2 Main Window
The main DigiFlow window follows that common for most
applications with a Multiple Document Interface (MDI). The menu bar at the top
provides access to the majority of the facilities, while the toolbar underneath
gives a more convenient method of accessing the more widely used functions. A
typical example is shown in figure 7.
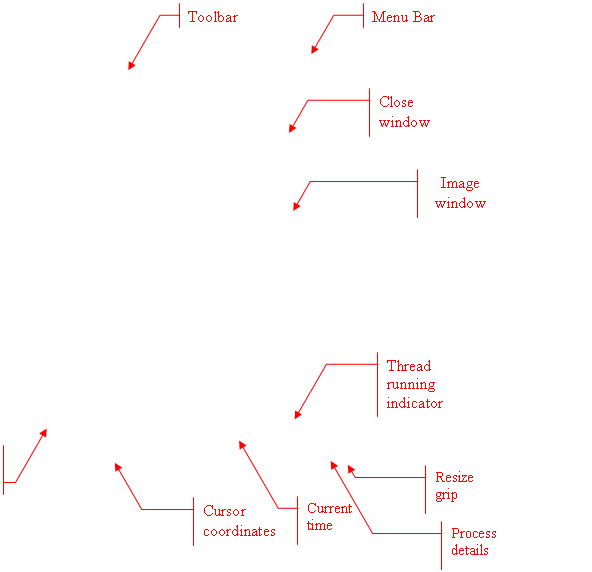
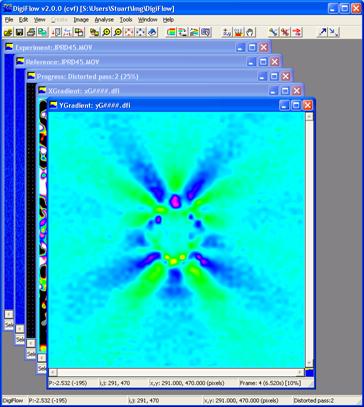
Figure 7: The basic DigiFlow window.
As is normally the case for Windows applications, the main
window and the client windows may be resized by dragging the frame of the
window. Holding down the control key, while dragging the boundary of a client
window, will cause the contents of the window to be zoomed so as to make the
best use of the available space. If you do not hold down the control key, then
the window size is changed without changing the zoom applied to its contents.
3.3 Obtaining
help
As is common with most Windows applications, help while
using DigiFlow can be obtainined by pressing the f1 key. This will start an instance of
Internet Explorer and bring up an html copy of this manual. DigiFlow will
automatically scroll to the position within the manual that is most relevant to
the dialog or process you have open at the time. Subsequent presses of f1 will utilise the
same tab in Internet Explorer, provided this remains open.
Some users, particularly when first starting, may prefer to
have the manual automatically keeping track with their activities. This can be
achieved by turning on the AutoHelp facility, either from the Help menu, or by clicking
the questionmark button () on the toolbar. When activated, an instance of the
Internet Explorer browser will be activated and track your activity, providing
timely help.
As an option to using the html version of this manual, the
manual is also provided as DigiFlow.pdf.
3.4 Image Selectors
DigiFlow uses image selectors to specify image streams for
input to and output from a given process. Four types of image stream are
supported:
Single images. These contain just a single image.
Movie. A movie contains multiple images stored
in a single file.
Sequence. A sequence is a collection of related files, typically identified by a numeric part of the file name that
increases by one between neighbouring images in the sequence.
Collection. A collection is a group of image files that have no special relationship to each other. Collections may be
subdivided into two groups: homogeneous collections and heterogeneous
collections. In a homogeneous collection, all the images within the
collection have the same format (same size, colour depth, file type, etc.).
With a heterogeneous collection, the format may vary from one image to another.
At present, most processes within DigiFlow do not support heterogeneous collections.
Image selectors may specify not only raster format image
files, but also vector format files. DigiFlow supports many standard raster
formats, including .bmp,
.tif, .gif, .png, .jpg, and .avi along with
special formats to provide backward compatibility with DigImage (.pic and .mov, the latter now
renamed .dfm in
DigiFlow). DigiFlow also introduces the new DigiFlow Image format, .dfi, to allow images
to be saved with full floating point precision, and the DigiFlow Pixel format (.dfp) provides text
output specifically tailored for raster images.
Vector format files include Enhance Meta Files (.emf) Windows Meta
Files (.wmf) and
DigiFlow Drawing format (.dfd).
The last of these provides output formatted as plain text containing both data
and drawing commands. This text may be imported into other applications, or
read back into DigiFlow to reconstruct the image or drawing it represents. If
GhostScript is installed on the system (see GettingStarted.pdf), then Encapsulated
PostScript (.eps)
files can also be opened with DigiFlow.
DigiFlow also provides a specialised file format (.dft) for storing
particle tracking data. While these may be treated as images, in general the
functionality available through the specialised particle tracking facilities is
to be preferred.
The specialised DigiFlow and DigImage formats (.dfm, .dfi, .dfp, dft and .dfd) are described
more thoroughly in §11.2.
3.5 Archive files
The concept of an archive file was introduced to DigiFlow in
version 3.4 as a method of both collecting multiple image files that form part
of a sequence, and of storing additional details about an image or a sequence
of images when the file format being used does not provide a mechanism for
storing this information.
DigiFlow archive files use a .dfa extension appended on to the
corresponding image file or sequence name. For example, if a .dfa file is generated for a sequence of
images image000.png,
image001.png, … image732.png, then the
name of the .dfa
file will be image###.png.dfa.
If the use of archive files is enabled, then when reading
the image sequence back in as image###.png,
additional information not present in the .png files themselves (such as the
method used to construct the sequence and the timing of the sequence) will be
recovered from the .dfa
file. Alternatively, attempting to open image###.png.dfa will both read the
sequence image###.png
and recover the additional information from the .dfa file.
The use of DigiFlow archive files is enabled or disabled
through the Open Image
and Save Image
dialogs (see §4.1 and §4.2). For some builds of DigiFlow, .dfa generation is disabled by default.
Under these circumstances, .dfa
support may be turned on by including the switch /dfa on the command line.
For further details on the format of .dfa files, refer to §12.11.
3.6 Sifting
A key concept associated with input image streams is sifting.
In DigiFlow, sifting is the process by which images are extracted from in input
stream. The extraction process may result in all the images being extracted, or
only a subset of images (typically specified by a start number, an end number
and a step). It may also result in a subregion of the image (a rectangular window
within the image) being returned, or, in the image being modified to conform to
some reference. Further details of the sifting process are given in §4.3.
3.7 DigiFlow
Macros
DigiFlow includes a powerful interpreter and associated
macro language. The language is referred to as dfc code. While the programming language
for dfc code is specific to DigiFlow, it follows the general syntax and conventions of many
other modern high-level languages. In addition to the basic functionality
expected of such languages, DigiFlow provides a vast range of functions
tailored specifically to tasks for which DigiFlow is ideal. This includes not
only image processing functions (ranging from contour tracing to Fast Fourier
Transforms), and data analysis functions (such as statistics, least squares
fits), to numerical solution of the equations of motion (e.g. Goudnov
solution of shallow water equations and stream function-vorticity formulation
for two-dimensional Boussinesq flows).
The present manual contains introductory documentation for
the use of dfc functions
and code. However, much of the detailed documentation for the individual dfc functions is to
be found in the interactive help system Help: dfc Functions. The most convenient
way of accessing this is frequently through the dfcConsole feature described in §5.2.10. The DigiFlow macros\ subdirectory (found in the
folder where DigiFlow is installed) contains a number of documented examples of
macro code.
3.8 Threads
One important aspect of DigiFlow is that it supports
not only multiple image windows, but also multiple processing threads. This has
two important benefits. First, it allows DigiFlow to continue to be used
interactively while it is processing simultaneously one or more sequence of
images, thus allowing real-time inspection of the progress. Second, for PCs
with multiple processors, the execution time of a single process can be greatly
reduced. (It should also be noted that more than one copy of DigiFlow may be
used simultaneously).
If the user attempts to close a window that is in
use with an active thread, then the system will warn the user that closing the
window will also kill the thread. Depending on the version of DigiFlow you are
using, windows that are playing a role in an active thread have the name of the
thread indicated in the window status bar at the bottom of the window and have
a ‘sloshing tank’ symbol 


 in the bottom right-hand corner.
in the bottom right-hand corner.
The user may also control the individual threads
more directly, stopping them, pausing or resuming them, or changing their
priority. This is achieved through the View Threads menu item (§5.3.10), or the corresponding  button on the main toolbar. (All
active process threads may be suspended by clicking
button on the main toolbar. (All
active process threads may be suspended by clicking  on the toolbar.)
on the toolbar.)
3.9 Text output
Some of DigiFlow’s features include graphical and text
output. In such cases it may be desirable to include more than simple plain
text. To achieve this, fully licenced copies of DigiFlow support LaTex-like
math-mode text formatting. For example, in Analyse: Time Series: Summarise (see §5.6.1.6) it is possible to specify the titles of the axes
of the graph produced. Specifying it as the string "Dimensionless height
$\big(\frac{h}/{\alpha^2H_0}\big)$" would produce the label
 .
.
Although DigiFlow does not understand the full range of
LaTeX commands and macros, it can interpret those most likely to be of use in
figures and graphs. The list includes:
Upper and lower case greek letters (e.g. \Alpha
or \zeta)
$
\!
\#
\$
\%
\&
\,
\2dots
\:
\;
\aleph
\angle
\approx
\backslash
\bar
\bf
\big
\BIG
\Big
\bigsizes
\bullet
\cdot
\circ
\copyright
\cos
\cosh
\dagger
\ddagger
\dddot
\ddot
\div
\dot
\dots
\downarrow
\Downarrow
\ell
\equiv
\euro
\exists
\exp
\footnotesize
\forall
\frac
\ge
\geq
\gg
\hat
\HUGE
\huge
\Im
\in
\infty
\int
\it
\langle
\LARGE
\large
\Large
\lbrace
\lbrack
\le
\left(
\left[
\Leftarrow
\leftarrow
\Leftrightarrow
\leftrightarrow
\leq
\ll
\ln
\log
\mathbf
\mathit
\mathrm
\minus
\mp
\nabla
\ne
\neq
\normalsize
\notin
\oplus
\oslash
\otimes
\overchar
\P
\partial
\phantom
\pm
\pounds
\prime
\prod
\propto
\qquad
\quad
\rangle
\rbrace
\rbrack
\Re
\right)
\right]
\rightarrow
\Rightarrow
\S
\scriptsize
\sim
\simeq
\sin
\sinh
\small
\sqrt
\subset
\subseteq
\sum
\supset
\supseteq
\surd
\tan
\tanh
\textbf
\textit
\textnormal
\textrm
\therefore
\tilde
\times
\tiny
\underline
\Uparrow
\uparrow
\wedge
\wp
\yen
\\
\^
\_
\{
\}
\~
Thereare some minor restrictions and additional
requirements for the DigiFlow LaTeX-like syntax compared with standard LaTeX. For
example, the standard LaTeX $\left(\frac{a}{b}\right)$ should be stated in DigiFlow
as $\left({\frac{a}{b}}\right)$.
The additional pair of braces tells DigiFlow that the fraction a/b
is controlling the size of the large left bracket. This additional pair of
braces does not affect the processing of the string by LaTeX. A further example
is that DigiFlow accepts LaTeX macros such as \alpha whether or not it is in ‘maths
mode’ (i.e. between $..$).
This LaTeX-like text formatting (available only with fully licensed
copies of DigiFlow) may also be used in dfc code, for example through the draw_text(..), draw_axes(..) and plot_titles(..) commands.
It is not possible to define additional LaTeX-like macros
from within LaTeX-like formatted text. However, additional macros may be
defined from within dfc
code; see §11.4 and the dfc help for further details.
A powerful feature of this component of DigiFlow is the way
it works to support the use of Encapsulated PostScript (.eps) files in LaTeX through the psfrag
macro package. See §5.1.12 for further details.
4 Common dialogs
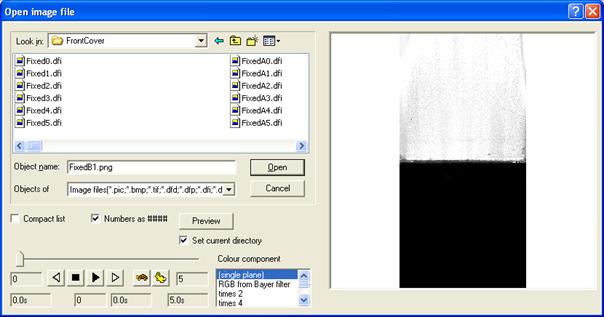
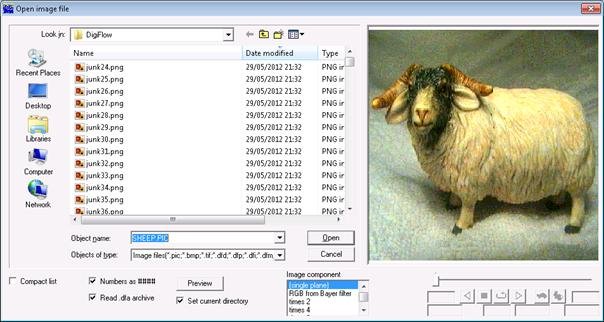
4.1 Open Image
The Open Image dialog box is used throughout DigiFlow to
open source image selectors (§3.1).
(a)
(b)
Figure 8: The Open Image
dialog box under Windows XP. (a) Showing all files and (b) using Compact List
option.
The Open Image dialog box consists of a standard
Explorer-style display of folders, files, file types, etc., along with a
preview pane on the right-hand side. This preview pane will attempt to display
the currently selected file.
DigiFlow supports a range of industry standard image
formats, plus some special formats. The special formats both provide
compatibility with the earlier DigImage system, and provide facilities (e.g.
floating point data representation) not found in industry-standard formats.
These non-standard formats are described in more detail in §11.2 (DigiFlow drawing format) and §12
(DigiFlow image file formats). Note that DigiFlow expects the user to specify
the extension of the file. It is therefore important that all extensions are
visible in the dialog (refer to §2.2 for how to
achieve this).
To select a single image or a movie, simply click on the
name of the file containing this object. If you prefer, the name of the file
may be typed at the File name
prompt. If you type in the file name a preview will not be generated
automatically, but can be requested by clicking the Preview button. If manually entering the
file name, then it is important that you specify the file extension to remove
any potential ambiguity.
To select a sequence, the name of the sequence must be typed
at the File name
prompt, using hashes (#) to indicate the varying numeric part of the file name.
Alternatively, click on any member of the sequence and check the Numbers as #### box.
This will convert (starting from the right-hand end of the file name) any
digits found into the appropriate number of hash characters, thus allowing easy
specification of the sequence. However, numbers enclosed in parentheses or
square brackets (i.e. (..)
or [..]) will
not be converted to hashes. This allows numeric data to be included
unambiguously in the file name. Again, the Preview button may be used to generate a
preview if it is not generated automatically.
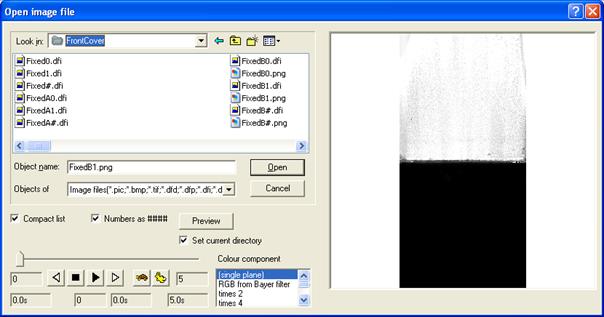
The precise behaviour of the Compact list check box depends on which
version of Windows you are using. The motivation, however, is to provide a more
compact way of accessing a large number of numbered images in a given folder.
Under Windows XP, the Compact
list check box will provide a more compact summary of those
present by displaying the name of the first few in a given sequence, and using
the compact hash notation to summarise the rest. An example of this is given in
figure 8, where figure 8a shows all the files
(without Compact list
checked) and figure 8b shows how the number of files visible is decreased and
sequences are replaced by hashes in the file name when the Compact list box is checked.. Selecting
the summary containing hashes is equivalent to selecting the entire series.
(Note that clicking on Compact
list will retain the files specified at the Object name prompt, but remove any
selection in the view window.)
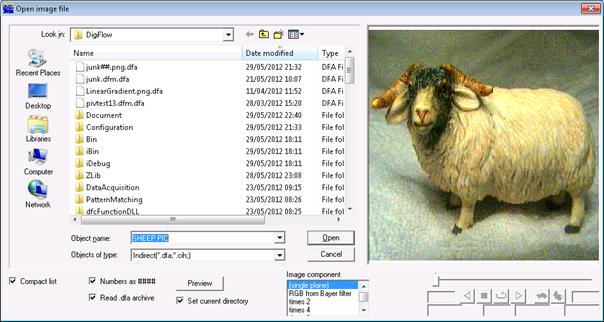
Unfortunately, this simple Compact list option is not available
under Windows Vista or Windows 7. Instead, checking Compact list searches for .dfa DigiFlow archive
files (see §3.5) and displays only them. Provided all the images and sequences
have been created with the archive facility enabled, then the net effect is
very similar. An example of this is shown in figure 9.
Whichever version of Windows you are using, if you select an
image file (rather than a .dfa
file) then the .dfa
file is read only if the Read
.dfa archive box is checked. However, if you select the .dfa file itself, then
it will always be read, along with the image or sequence of images.
(a)
(b)
Figure 9: The Open Image dialog box under Windows 7. (a)
Showing all files and (b) using Compact List option. Note that only thos files
for which a .dfa
archive file was generated will be shown when the Compact
list box is checked.
Note that the default settings of the Number as ####, Compact list and Read .dfa archive check boxes is
remembered from one invocation of the dialog to the next.
A collection of images may be specified using the mouse in
combination with the <shift>
key to select a range of files, or the ctrl keys to select or deselect
individual files. Alternatively, the names may be typed at the File name prompt,
each name enclosed by double quotation marks. The collection is sorted into
alphabetical order for display and processing. (If a collection is specified in
this manner then any hash characters will be interpreted as hashes. Similarly,
checking Number as ####
will be ignored.) In general, a sequence is preferable to a collection as it
offers a greater level of control.
A collection of images may also be selected using wildcards.
This may be achieved in two ways. If you use the standard Windows wild cards (? to represent a
single character, and *
to represent a variable number of characters) then the dialog will display only
those files that fit the description; you may then select them in the normal
manner. Alternatively, you may use % in place of ? and $
in place of *
to do the selection directly. For example, typing Sheep*.* will cause the dialog to
display sheep2.tif,
sheep.bmp, sheep.jpg, sheep.pic and sheep.tif to be
displayed in the dialog box, which may then be selected using the mouse and
shift key. Alternatively, Sheep$.$
will achieve the same result, selecting all five files.
If the selected image contains true colour, then the Colour component
list box is enabled. This list box allows selection of whether the image is to
be treated as full colour, or how the colour information is converted to a
greyscale for processing by DigiFlow. For example, selecting RGB will allow
DigiFlow to process the red, green and blue image planes separately (where this
makes sense), while green
will take the green component of the colour image and treat it as a greyscale
image, or hue
will process the colour using a hue/saturation/intensity representation of the
image. The options greyscale
and mean all
produce a similar effect, although precise details of how the resulting image
is constructed from the red, green and blue components differs. The table below
gives the relationships.
|
Key
|
Returns
|
Comments
|
|
RGB
|
Three colour planes
|
Full colour image
|
|
Mono
|
0.11*red + 0.59*green + 0.30*blue
|
Same as grey.
|
|
Red
|
red
|
Red component only.
|
|
Green
|
green
|
Green component only.
|
|
Blue
|
blue
|
Blue component only.
|
|
hue
|
|
Image hue (colour)
|
|
saturation
|
|
Image saturation (purity)
|
|
intensity
|
|
Image intensity (brightness)
|
|
cyan
|
1 – red
|
|
|
magenta
|
1 – green
|
|
|
yellow
|
1 – blue
|
|
|
grey
|
0.11*red + 0.59*green + 0.30*blue
|
Same as mono.
|
|
mean
|
(red + green + blue)/3
|
Mean of three components.
|
|
max
|
max(red, green, blue)
|
The brightest component.
|
|
min
|
min(red, green, blue)
|
The darkest component.
|
An image containing only a single plane of data may contain
colour information if captured from a camera fitted with a Bayer colour mosaic
filter. To provide support for this and since it is unlikely that the image
file will contain information that DigiFlow can use to automatically detect
such an image, when DigiFlow detects a single plane of data in the image to be
opened it provides the following supporting options:
|
Key
|
Returns
|
Comments
|
|
(single
plane)
|
P
|
Standard image
|
|
RGB from
Bayer filter
|
Three colour planes
|
Interpret as a full colour image using a standard Bayer filter
layout
|
|
times 2
|
2*P
|
Intensities rescaled
|
|
times 4
|
4*P
|
Intensities rescaled
|
|
times 8
|
8*P
|
Intensities rescaled
|
|
times 16
|
16*P
|
Intensities rescaled
|
|
times 32
|
32*P
|
Intensities rescaled
|
|
times 64
|
64*P
|
Intensities rescaled
|
|
div 2
|
P/2
|
Intensities rescaled
|
|
div 4
|
P/4
|
Intensities rescaled
|
|
div 8
|
P/8
|
Intensities rescaled
|
|
div 16
|
P/16
|
Intensities rescaled
|
4.2 Save Image As
The Save
Image As dialog is essentially the same as the Open Image dialog
(§4.1), but is produced when the name of the output
image selector (§3.1) is required.
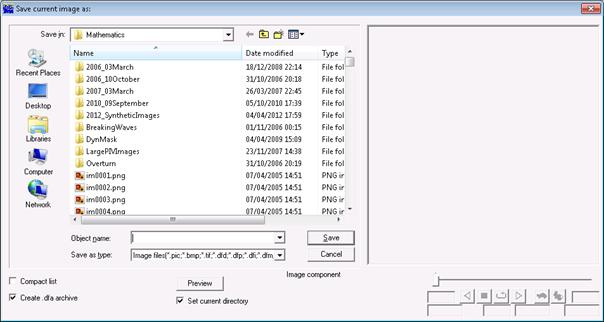
Figure 10: The Save Image
As dialog box.
If an image selector of the same name does not exist
already, then the file name must be entered by typing at the File name prompt. The
extension to be used should be specified explicitly as DigiFlow uses this to
determine the file type to be created. It is therefore important that all
extensions are visible in the dialog (refer to §2.2
for how to achieve this). Simply selecting a type from the Save as type list will not necessarily
have the desired effect if more than one possible type is indicated.
Note that some file types have a range of options such as
bit depth and compression. These are normally controlled from outside the Save Image As dialog
box using the Options…
button in the parent dialog. Refer to §4.4 for
further details.
DigiFlow supports a range of industry standard image
formats, plus some special formats. The special formats both provide
compatibility with the earlier DigImage system, and provide facilities (e.g.
floating point data representation) not found in industry-standard formats.
These non-standard formats are described in more detail in §11.2 (DigiFlow drawing format) and §12
(DigiFlow image file formats).
The Compact
list check box operates in the same way as for the Open Image dialog
described in §4.1. Here, the Create
.dfa archive check box replaces the Read .dfa archive and causes DigiFlow to
create a .dfa
archive for the output it produces (see §3.5).
4.3 Sifting input streams
When processing an image stream it is often desirable to
select only a subset of the stream for processing. This subset may contain only
some of the images from the stream, and/or it may contain only part of each
image. Within DigiFlow this process of selecting a specific part of an image
stream for processing is referred to as ‘sifting’. When sifting is available,
the corresponding dialog will have a Sift… button (typically one for each input selector) that
starts a tabbed dialog box controlling the sifting process. The following
subsections describe the various sifting options.
4.3.1 Selector
timing
The Selector Timing tab of the Sift dialog allows the user
to specify which times from a multi-image image selector (§3.4) will be used for a process.
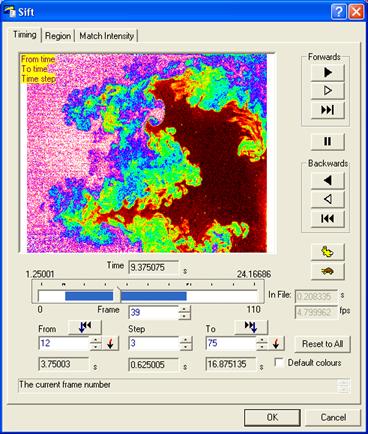
Figure 11: The standard
Selector Timing tab of the Sift dialog.
This tab allows the preview of the image selector and
specification of the processing start and end points as well as the step
between the images to be processed.
The buttons down the right-hand side allow the image
selector to be played, the speed of this preview controlled by the hare and
tortoise buttons. The slider allows the currently visible frame to be dragged
to any time. The Frame
edit box and spin control allow more precise movement of the preview frame. The
 and
and  buttons move to the currently
specified limits for the processing.
buttons move to the currently
specified limits for the processing.
The frame numbers for the start and end points may be typed
in the From and
To edit boxes,
and the spacing in the Step
edit box. The corresponding time boxes below will be updated automatically.
Clicking the  buttons adjacent to the From or To edit boxes will set the corresponding
from or to position to the current position, shown by the slider and the edit
boxes immediately above (time) and below (frame).
buttons adjacent to the From or To edit boxes will set the corresponding
from or to position to the current position, shown by the slider and the edit
boxes immediately above (time) and below (frame).
Alternatively (but less precisely), holding <shift> while
dragging the slider will allow specification of the timings.
When the From
and To times
are set, or Step
is not unity, then this information is displayed on a yellow background at the
top of the image preview.
For files that do not store timing information, the DigiFlow
assumes by default that the files are separated in time by one second. This may
be changed using In file,
in which the image spacing may be specified in either seconds or, using the
lower of the two controls, in frames per second. These two controls are
disabled for files that store time information, but display the relevant
details.
Reset to
All resets the start and end points to include the entire
selector.
Checking the Default
colours control will cause the preview image to be displayed
using the DigiFlow default colour scheme rather than the colour scheme stored
in the image file.
4.3.2 Selector
region
The Selector Region tab of the Sift dialog allows the user
to specify a region within an image selector (§3.4)
that will be used for a process.
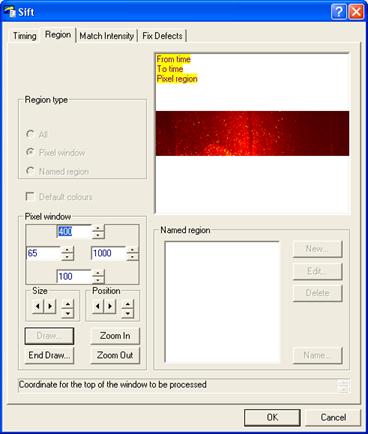
Figure 12: The standard
Selector Region tab of the Sift dialog.
For a process requiring more than one input stream (and
hence having more than one image selector in its dialog box), one of the
streams (typically the first in the dialog box) will be the master
stream. If the region for this stream is changed, then the region for the other
(slave) streams will be changed automatically to conform to (typically
made the same as) that for the master stream. It remains possible, however, to
change independently the region for the slave selectors, provided the size of
the region for the slave selector is compatible with that for the master
selector.
The type of region is selected by the Region type group of radio buttons. The
example shown in figure 12 is for a master
selector; the Conform
option is not available here, but would be visible above All when sifting slave selectors.
If Pixel
window is selected, the pixel coordinates of the left, right, top
and bottom of the window may be specified in the edit controls within the black
rectangle. If preferred, the size may be increased without shifting the centre
of the region, or the location of the region may be changed without adjusting
the size, using the Size
and Position
controls, respectively.
Alternatively, clicking the Draw button opens a full size window
that allows the window to be moved and resized dynamically using the mouse (see
figure 13). (Hint: it is sometimes worth dragging a
corner of the window to increase its size and thus make it easier to grab the
edge of the region window.) The Zoom
In and Zoom Out
buttons may be used to control the magnification while drawing. Similarly, you
may swap between this window and the Sift dialog box to use the various edit
and spin controls to move the region around. Click on the End Draw… button to close the drawing
window and re-enable the other controls on the Sift dialog.

Figure 13: Drawing a
region.
If Named
region is selected, then previously saved regions are displayed
and may be selected. This provides a convenient method of using the same region
in a range of different processes. The four buttons to the right of the list
box may be used to manage these named regions. New named regions may be created
either by clicking the New
button, in which case a subdialog is produced to allow specification of the
region, or by clicking the Name
button (when Pixel window
is selected) to give a name to a pixel window. The Edit button allows alteration of an
existing window, while Delete
removes the region from the list. Note that selecting a named region that is a
Pixel window will update the controls in the Pixel window group. Switching back to Pixel window allows
editing of these values, while Name
may be used to overwrite the old values with the new ones, or to create a copy.
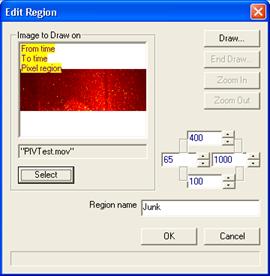
Figure 14: Editing a
region.
4.3.3
Matching intensities
Quantitative measurements often require that the intensities
are matched between different frames and sequences. The intensities of the raw
image streams may fluctuate due to a number of reasons. One common one is the
mismatch in frequencies between the illumination and the camera frame rate.
Depending on the type of light source and the shutter speed of the camera, this
mismatch may lead to a modulation of nearly 50% of the signal amplitude, while
automatic gain features can lead to similar results. While it is in general
best to avoid these problems by using continuous or high frequency light sources,
this is not always practical.
The Match
Intensity tab in the Sift dialog (figure 15)
provides a basic mechanism for correcting the intensities of input image
streams to match them to some fixed reference. The basic strategy is for the
image to contain two reference regions that contain approximately uniform
intensities that should not change with time. These two regions are then used
to generate a linear mapping between the input image and a reference intensity,
thereby adjusting the intensities in preparation for processing.
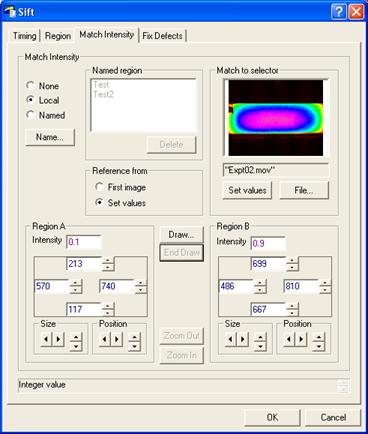
Figure 15: The
Match Intensities tab provides the ability to directly relate an image to
reference values.
The Match Intensity facility is turned on and off using the
radio button group in the top-left; .when off (None), then the intensities are read
without alteration. The Match Intensity facility can be enabled either using
details provided locally (Local),
or with details saved previously (Named), in a similar manner to that used for Regions.
A locally defined Match Intensity reference consists of a
pair of rectangular regions, Region
A and Region B.
The location and size of these regions is controlled by a variety of controls
for specifying the left, right, top and bottom of each of the rectangles.
Additionally, as with the Regions dialog, the regions may be drawn on an image
and dragged to their desired location by clicking the Draw… button (see figure 16).
Each region requires an intensity to be associated with it.
When Reference from
is set to Values,
then the Intensity
controls in the Region A
and Region B
groups is enabled. The user may directly enter the desired (target) reference
here, or by using File
in Match to selector
to select a suitable image, then the Match button will read the intensities from the specified
image. Alternatively, if Reference
from is set to First
image, then the reference intensities are not entered at this
point, but rather they are determined automatically from the first image in the
stream to be processed.
Once the various controls for a Local Match Intensity have been set,
their values may be saved for use elsewhere by clicking Name…. This prompts for a user-supplied
descriptive name, saves the settings, and switches the dialog into Named mode.
Selecting an entry from Named matches loads the corresponding
settings for use. If you wish to alter the settings of a saved match, load it
by selecting from the list, then switch to Local mode. Make any necessary changes,
then click again on Name
to name and save it (you may re-use an existing name).
Figure 16:
Drawing regions for intensity matching.
4.4 Modifying output streams
This section describes the various modifications that may be
made to the output streams. These modifications are accessed via the Options… button in
the output stream select group. The precise contents of this dialog will vary
depending on the output file type that has been selected.
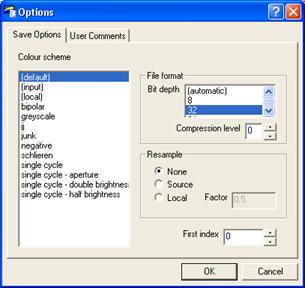
Figure 17: The Save Options
dialog.
4.4.1
Setting output stream colour
The colour scheme for the output stream is selected from the
list of known colour schemes in the Colour scheme list box. Selecting the (input) member will set the colour
scheme to be the same as for the master input stream.
If you wish to add a new colour scheme or modify an existing
scheme, you must use the View:
Colour Scheme… menu option. Refer to §5.3.6
for further details.
4.4.2 Full colour
For output formats such as .bmp, .png or .jpg that support true colour images, a Full colour checkbox
is produced. If checked, then the output is saved as in a 24 bit true colour
format. If not checked, then a greyscale version of the output is saved, along
with the selected false colour map (the false colour map is not saved for .jpg files).
4.4.3 File format
The File
format group invokes various options that may exist for the
specified file type. The contents of this group will depend on the file type
specified: in many cases there are no options and so the group is left empty.
The Bit
depth field determines the number of significant bits saved for
each pixel in the image. Most image formats use 8 bits, but for high resolution
images, or images that result from numerical computations, a greater depth may
be desired. If the .dfi
format is specified for the file type, then bit depths of 8, 32 and 64 bits are
possible.
When available, the Compression level edit and spin control
will determine whether or not the image is to be compressed using a lossless
compression. A value of zero indicates no compression, with positive integers
giving various levels of compression. Typically compressing an image reduces
its size by around a factor of two, but at the cost of slower access (although
for a very slow hard disk the access speed may improve with compression). The
additional time taken to compress an image will depend in part on the level of
compression requested, and in part on the structure of the image. If a process
seems particularly slow, but still producing the correct answer, try reducing
the level of compression.
In the case of an .avi file, selecting zero causes full, uncompressed
images to be saved, whereas setting Compression level to 1 will use the Cinepak compression
(installed by default with Windows). For other compressions specify a value of
2 for Compression level
which will then cause the standard Windows Video Compression dialog to be produced
when DigiFlow is ready to save the first frame of the output stream. (Note that
most of the .avi
compression options are ‘lossy’ in the sense that only an approximation to each
image is saved.)

Figure 18:
Standard Windows Video Compression dialog.
For .jpg
images, the compression applied is ‘lossy’. The higher the level of
compression, the greater the fraction of information lost. This is controlled
by the Quality
control. Note that in general the lossy nature of the compression in .jpg images means that
they should not be used for the storage of intermediate results.
4.4.4 First index
By default, the first image in a sequence produced by
DigiFlow will be given a zero index (numerical part of the file name). The First index control
may be used to change the index for this first image. In either case,
subsequent images will always be produced with unit increments from this value.
4.4.5 Resampling
When the .dfi
image format is selected, it is possible to rescale the output stream before it
is saved and then reverse this rescaling when the image is subsequently read
in. Typically this option is used to reduce the resolution of the saved image,
but maintain its size by interpolating back to the original size before using
the image again.
This feature is enabled using the Resample check box. When enabled, the
resolution of the saved image is controlled by the Factor edit control which accepts a floating
point value for the relative resolution of the saved image. For example, a
value of 0.5
will cause the saved image to have only ¼ of the number of pixels of the
original in the file, but through interpolation the missing pixels are
reconstructed when the image is read in again. This option is particularly
valuable for use with images produced by the synthetic schlieren (§5.6.4.3) and PIV (§5.6.5.2)
facilities.
4.4.6 Save
user comments
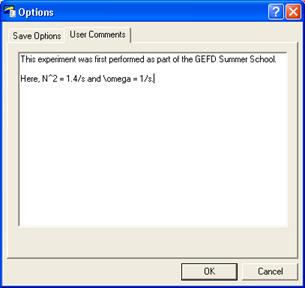
Figure 19:
User comments tab.
Some file formats (e.g. .dfi, .dfd and .dft) allow user comments to be saved
along with the images. These comments are specified using the User Comments tab of
the Save Options dialog.
4.4.7
Encapsulated PostScript streams
DigiFlow can produce Encapsulated PostScript (.eps) output either
using the Export to EPS
option in the File
menu (see §5.1.12) or by specifying an .eps file as the
output stream. In the latter case the normal Options dialog has an additional EPS button that
invokes the dialog shown in figure 20.
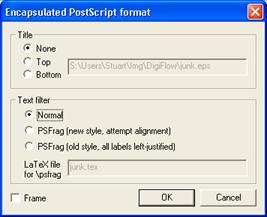
Figure 20: The
output options for Encapsulated PostScript (.eps) files.
The PostScript options provide the ability to add a title
either above (Top)
or below (Bottom)
the image or graphic output, and to add a frame (Frame) around the output. DigiFlow (commercial
version only) provides support for the LaTeX \psfrag macro package. This
enables the text produced by DigiFlow to be readily replaced with text
generated by LaTeX, thus keeping font and style information consistenet and
allowing post-plotting adjustment of the text labels, etc. Selecting Normal produces the eps
containing the original labels, whereas with either of the PSFrag options the text is replaced by a
unique character for each element. At the same time, DigiFlow creates a .tex file that
contains the mapping between these characters and the original text. This .tex file can then be
embedded in included in the main LaTeX document to reproduce the figure. See §5.1.12 for further information on the Encapsulated
PostScript formatting options.
4.5 dfc Help
As will be seen in §5, a large
part of DigiFlow’s power and flexibility is gained by the use of user-supplied
macro code. This code is known as dfc code. Examples of facilities that require such code
include Analyse: Time:
Extract (§5.6.1.5), Analyse: Time: Summarise
(§5.6.1.6), Tools: Transform Intensity (§5.7.2) and Tools: Combine Images (§5.7.3).
Details of the macro code itself are given in §§8
and 9. However, this manual gives only a relatively
brief introduction to a subset of the dfc functions available within DigiFlow.
Instead, the bulk of the documentation is provided within an interactive help
facility available from within DigiFlow itself in the Help: dfc Functions menu item, and from
the  button
within dialogs where such information is of value.
button
within dialogs where such information is of value.
The help facility takes the form of the dialog illustrated
in figure 21. To find a function performing a given
task, simply type some information about that task into the Search for box. For example, if you want
to find functions that have something to do with drawing, enter “draw”. You will
notice that as you enter “draw”,
the Look up
list changes as each letter is typed. When you type the “d”, the size of the items in the list is
reduced so that it only includes those with a “d” somewhere in their names. Similarly,
“dr” leads to
a further reduction, excluding those that do not have this pattern, and so on.
Spaces in the Search for box are interpreted as “and” criteria for the
search. For example, entering “dr ma” would reduce the list to those functions with both
“dr” and “ma” in their names,
but without the two patterns needing to be adjacent. This, combined with the
logical and descriptive (if somewhat verbose) naming conventions for DigiFlow
functions, provides a very powerful search facility.
At all stages the Look up list is sorted alphabetically. (Note that if Search for is left
blank, then Look up
contains all possible functions.)
Selecting an item in the Look up list then brings up the
documentation for the function in the three boxes below. The top of these
identifies the role played by the entry within dfc code. The list box below gives the
range of possible entry points to the function. As we shall see later, many
DigiFlow functions are “overloaded” (i.e. they accept more than one type
of data), and may have optional parameters. This list itemises the full range
of possibilities. Selecting an entry point from this list and clicking the Copy button copies
this entry point into the clipboard.
The bottom control on the dialog provides the detailed
documentation for the selected function. This documentation should be read in
conjunction with the entry point documentation. The help system is hyperlinked
(e.g. draw_start(..) in figure 21): clicking on a hyperlink will take you to the
corresponding help. Similarly, backward ( ) and forward (
) and forward ( ) buttons will move through previously
selected hyperlinks.
) buttons will move through previously
selected hyperlinks.
The General
items list box provides access to more general information, such
as modifiers for input and output streams, recent changes to DigiFlow, how to
return images from code specified for tools such as Transform intenstiy, and how to produce
simple plots.
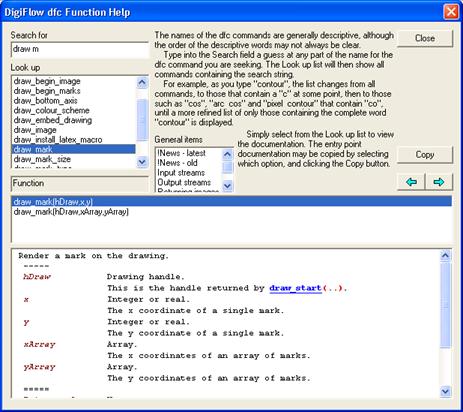
Figure 21: The help
dialog for dfc code.
The help facility may also be started from within a code
edit box by right-clicking. Doing so will cause the word under the cursor to be
pre-loaded into Search for
field. Moreover, if that word is a known DigiFlow command, the details will be
looked up automatically.
4.6 Code library
DigiFlow incorporates a number of features that will
facilitate the re-use of the dfc
code used in facilities such as Analyse:
Time: Extract (§5.6.1.5), Analyse: Time: Summarise
(§5.6.1.6), Tools: Transform Intensity (§5.7.2) and Tools: Combine Images (§5.7.3).
This section describes the DigiFlow Code Library. Details of the macro code
itself are given in §§8 and 9.
The dfc
Code Library provides convenient method of storing and retrieving
user-developed code. The library itself is stored in a file named DigiFlow_Library.dfs
in the directory in which DigiFlow is started. Note that this file is re-read
from the current directory every time the Code Library is invoked. The DigiFlow_Library.dfs
file may be copied from one directory to another, if the user desires.
The library is accessed via the  Code Library button in appropriate
dialogs. Central to the Code Library dialog, shown in figure 22, is the Entry list that itemises all previously saved items of
code for this DigiFlow facility (a separate list is maintained within the same
file for each different facility). Any code currently specified in the parent
dialog box is recorded under the _current key; this will be the default selection upon
entry.
Code Library button in appropriate
dialogs. Central to the Code Library dialog, shown in figure 22, is the Entry list that itemises all previously saved items of
code for this DigiFlow facility (a separate list is maintained within the same
file for each different facility). Any code currently specified in the parent
dialog box is recorded under the _current key; this will be the default selection upon
entry.
To retrieve a previously stored code item, simply select it
from the Entry
list and click OK
to insert it in the parent dialog. The Code edit box will show the code, while Description will show
any previously saved description. Clicking Cancel will return to the parent dialog
without changing the code in that dialog.
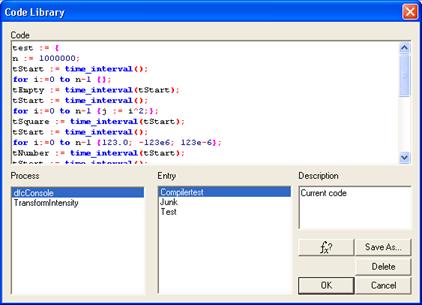
Figure 22: The code
library dialog.
The Code
and Description
may be edited before returning to the parent dialog. The Process list allows code to be selected
from different processes. The Delete
button may be used to remove an entry from the Code Library, and the button gains
access to the dfc
Help facility. Finally, the Save
As button allows code to be saved into the data base (see figure 23) under any of the processes.

Figure 23: Name under
which a Code Library entry is to be saved.
5 Menus
This section describes the main menu options. Some of these
will be familiar as they follow standard Windows conventions, whereas others
are specific to DigiFlow. Many of these menu options can be strung together to
create processes that are more complex. Details of how to achieve this are
given in §6.
5.1 File
Toolbutton: 
Shortcut: ctrl+O
Related commands: open_image(..), read_image(..), read_image_details(..), view(..)
Allows an image selector (§3.4)
to be opened for viewing. The image is selected through the Open Image dialog
box (§4.1). Both images and drawing formats may be
opened. Encapsulated PostScript (.eps)
may also be opened if DigiFlow is able to find an installed copy of GhostScript
(see §2.2.2).
Toolbutton: 
Shortcut: ctrl+R
Related commands: include(..)
Opens and runs a DigiFlow dfc macro. Refer to §10 for further details.
5.1.3 Run Macro
Toolbutton: ctrl+shift+R
Shortcut:
Related commands:
Opens and runs a DigiFlow dfc macro from the Macros subfolder within the folder where
DigiFlow is installed. This folder contains various macros and wizards that are
of general value. Refer to §10 for further details.
Toolbutton: 
Shortcut: ctrl+S
Related commands: save_image(..), write_image(..)
This option allows the contents of the active window to be
saved. Note that if the active window contains a sequence or other collection
of images, only the currently displayed image will be saved. To copy an entire
sequence use File Edit stream
(see §5.1.6) or one of the related transformation
tools.
5.1.5 Live Video
5.1.5.1 Show Live Video
Toolbutton:
Shortcut:
Related commands: process File_ShowLiveVideo(..), camera_live_view(..)
This option creates a new window and streams live video
directly to it. Whilst the live view is intended primarily for previewing
camera output, it may be used in conjunction with macros such as camera_grab(..) to acquire
single or multiple frames, or with camera_capture_file(..), camera_start_capture
and camera_stop_capture(..) to acquire
entire sequences.

Figure 24: The dialog
controlling what is seen in a live video window.
Video captured using this option is fed continuously to the
display until stopped by the user; it is not saved to hard disk (except via the
use of dfc
code). For this reason, no duration can be specified. For some cameras, it is
possible to set the shutter speed (Shutter, in frames per second; n
frames per second is equivalent to a shutter speed of 1/n
seconds) independently of the acquisition rate (set by Capture, in frames per second). However,
many digital cameras force the two rates to be equal. For some supported
CameraLink cameras, the Shutter
speed and camera Gain
can be set as integer indices into the range of possible values. The meaning
and acceptable range of values varies between different makes and models of
cameras. (Note that a value of zero indicates unit gain on some cameras, but on
others, such as the UniqVision UP1830CL, unit gain corresponds to a value of
128. The default value is obtained from the entry for a specific camera in DigiFlow_Cameras.dfc.)
The frame rate for updating the display is independent of
the shutter and capture rates. Typically Display is set to a lower frame rate
(there is little point exceeding around 12 frames per second). Any necessary
processing of the incoming data stream to correct the format is undertaken
automatically.
The Display
resolution group controls how much of the original image being
captured by the framegrabber will be displayed on the screen (note that this
does not affect the data available through dfc functions such as camera_grab(..)). The meaning
of the various options is self-explanatory.
In some cases, simple real-time processing of the image
prior to display will greatly assist with the setting up and running of the
experiment. The Display
processing group controls the type of processing that will be
done. These are described in more detail for the Capture Video option in §5.1.5.2. To suppress processing, select none from the list
box. For large images, it may be best to use Display resolution to reduce the
resolution and thus the computational burden of undertaking any processing.
The Tools:
Slave Process family of functions (see §5.7.5)
provides a convenient way of accessing an even broader range of additional
functionality, ranging from focusing tools to real-time optical flow
calculation.
Particle Streaks
If Display
processing is set to particle streaks then the dialog shown in figure 25 is displayed to provide processing of display output
while at the same time capturing the raw video to a file. There are four
display options: Threshold,
Maximum, Minimum and Direct.
For Threshold
the incoming image is segmented into particles (bright points) and background
(dark points) by varying the Threshold
control. Using relatively simple processing, the particles so identified may be
converted into comet-like streaks that slowly fade with time. The length (in
time) of these streaks is determined by the Length control.
The Maximum
and Minimum
options work in a similar way except that rather than segmenting the incoming
image, the brighter (Maximum)
or dimmer (Minimum)
of the incoming and stored images is used. Again the length of the streaks can
be set using the Length
control.
When Direct
is selected, then the incoming images are displayed without any further
processing.
The Reset
button clears the display of all earlier times.

Figure 25:
Particle streaks preview dialog.
The rate at which the screen is refreshed is set by Display fps. Note,
however, that the desired rate may not be achieved if the computational load is
too great.
The Display
step group of controls is used to aid the viewing of very large
images that may be larger than the available display area. The edit and spin
controls set the step between displayed pixels (hence a value of 2, for
example, will give a half-resolution image). The grid of buttons in the bottom
left allows the view port into a larger image to be moved around in a manner
that is efficient to display. These options are only enabled if the Window option in the Live Video dialog is
checked.
Synthetic Schlieren
If Display
processing is set to synthetic schlieren then the dialog shown in figure 26 is displayed to provide processing of display output
while at the same time capturing the raw video to a file. This allows real time
visualisation of a synthetic schlieren image (see §5.6.4).
There are three processing options: Difference is the simplest (and computationally fastest)
technique that provides a qualitative output proportional to the magnitude of
the gradient in the density perturbation. The Horizontal gradient and Vertical gradient
options perform more a more sophisticated analysis that returns a
semi-quantitative output of the specified component of the gradient in the
density perturbation. Note that these two options distinguish between positive
and negative gradients.

Figure 26:
Synthetic schlieren preview dialog.
The Gain
control determines the relationship between the gradient and the intensity of
the display. The Reset
button forces the reference image to be recaptured.
The rate at which the screen is refreshed is set by Display fps. Note,
however, that the desired rate may not be achieved if the computational load is
too great. The Direct
button turns off the streaks processing and displays directly the camera input.
The Display
step group of controls is used to aid the viewing of very large
images that may be larger than the available display area. The edit and spin
controls set the step between displayed pixels (hence a value of 2, for
example, will give a half-resolution image). The grid of buttons in the bottom
left allows the view port into a larger image to be moved around in a manner
that is efficient to display. These options are only enabled if the Window option in the Live Video dialog is
checked.
5.1.5.2 Capture Video
Toolbutton:
Shortcut:
Related commands: process File_CaptureVideo(..), camera_live_view(..), camera_capture_file(..), camera_start_capture(..), camera_stop_capture(..)
Using this facility, a video sequence may be captured from
one of the digital video cameras supported by DigiFlow.
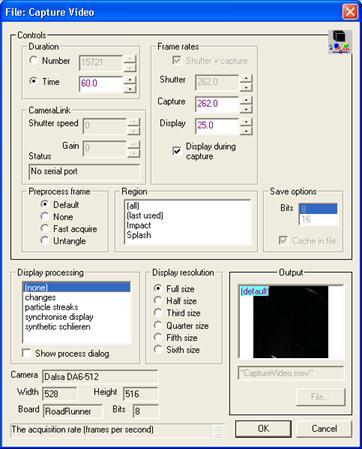
Figure 27: Dialog box
controlling the capture of video.
The basic timing for the video sequence is controlled by a
combination of the Duration
and Frame Rates
groups. The first of these sets the length of the sequence, either as a
specified number of frames (if Number
selected), or as time in seconds (Time selected). For some cameras, it is possible to set
the shutter speed (Shutter,
in frames per second; n frames per second is
equivalent to a shutter speed of 1/n seconds)
independently of the acquisition rate (set by Capture, in frames per second). By
checking Shutter = capture,
then the two of these are forced to be equal. For some supported CameraLink
cameras, the Shutter speed
and camera Gain
can be set as integer indices into the range of possible values. The meaning
and acceptable range of values varies between different makes and models of
cameras. (Note that a value of zero indicates unit gain on some cameras, but on
others, such as the UniqVision UP1830CL, unit gain corresponds to a value of
128.)
The frame rate for updating the display is independent of
the capture rate. Typically Display
is set to a lower frame rate (there is little point exceeding around 12 frames
per second). This setting does not affect the data stored to disk. For some
systems the bandwidth requirements of displaying the image while acquiring to
hard disk exceeds that available. In such cases the Display during capture check box should
be cleared, thus suppressing the display during the capture, although the
display is still updated before capture begins and after capture finishes.
For some camera and framegrabber combinations, the raw data
coming from the framegrabber may not be in the correct format for display. This
typically occurs with multi-tap cameras; most single-tap cameras produce data
in the correct format and require no additional processing. If additional
processing is required, the Preprocess
frame group determines what should be done in this situation. The
Untangle option
forces the data to be untangled before displaying or saving to hard disk. This
option is the most processor and memory bandwidth intensive, and so may not
function adequately on all systems, especially during the capture process when
much of the bandwidth is already taken up. To overcome this, the Fast acquire option
untangles the images before and after the capture process, thus giving an
intelligible preview, but turns off the untangling during the capture. DigiFlow
will automatically untangle the image subsequently when it reads the image file
produced in this manner. The remaining option, None, turns off all processing.
The Display
resolution group controls how much of the original image being
captured by the framegrabber will be displayed on the screen (note that this
does not affect the data stored to disk). The meaning of the various options is
self-explanatory.
In some cases, simple real-time processing of the image
prior to display will greatly assist with the setting up and running of the
experiment. The Display
processing group controls the type of processing that will be
done. Note that this does not affect the data written to disk. To suppress
processing, select none
from the list box. For large images, it may be best to use Display resolution to reduce the
resolution and thus the computational burden of undertaking any processing.
The Output
group provides a standard interface to select the destination for the captured
image. However, by default DigiFlow will be configured to always capture to a
fixed location (see §13 for details) to avoid the
user having to select a disk drive with appropriate characteristics and to
force the user to go through a compulsory review process to extract only those
parts of the image stream that are of value. If this feature is enabled, then
the Output
group will be disabled (the file name CaptureVideo.dfm will be visible) and following
completion of the sequence capture, the Edit Stream dialog (see §5.1.6) will be started automatically to control this
second step. Not further that DigiFlow can be
configured to use a shared network drive for video capture. In this case, the
drive is locked during the capture process until the user has transferred the
file off this server.
If you do not want to capture the entire field of view of
the camera then you may choose the region you wish to save through the Region list. The
region must have been defined within DigiFlow previously (e.g. using Edit: Regions; see §5.2.7, or as part of a Sift operation). Note that there is a
time overhead in extracting a region from an image. Consequently, although the
amount of data to be stored is reduced, the total time taken may be increased
in some circumstances. However, if the region to be saved is more than around
20% smaller than the full view, then it could well be worth capturing a more
limited region.
After pressing OK, DigiFlow opens an image preview, creates a Display processing
dialog (see below) if display processing was selected, and then prompts the
user to start the acquisition as illustrated in figure 28.
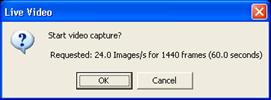
Figure 28: Message
box starting the video capture.
After the sequence capture has finished, the performance is
displayed in a message box, such as shown in figure 29.
The precise text in the message box will depend on whether or not the
compulsory review feature is enabled. Note that the ‘achieved’ timings may not
be precise, especially for relatively short sequences.
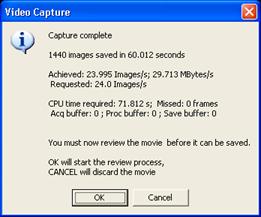
Figure 29: Message
box at end of video capture.
If the computer fails to keep up with the bandwidth
requirements of the capture process, then this will be indicated by there being
some missed frames, and a lower than expected frame rate being achieved. The
amount of CPU time required is a strong function of any display processing
required. The synthetic
schlieren option was selected for the example illustrated in
figure 29. This was performed on a 1GHz dual
processor machine. Clearly more CPU time was required than the capture time,
but each processor was busy only around 60% of the time. A single processor
machine, however, would not have managed to keep up with the bandwidth
requirements.
The review process will utilise either the File: Edit Streams
(see §5.1.6) or File: Camera
File (see §5.1.7) dialogs. For most cameras, the former will be
used as all that is necessary is to copy across the parts of the captured
sequence that are actually needed. However, for some cameras, it can be
desirable to impose a flat-field correction during this copy process. Where the
DigiFlow camera database suggests this is desirable, DigiFlow will start the File: Camera FIle
dialog instead. In either case, if Cancel is selected in response to the dialog (figure 29)
at the end of the capture process, you can still access the captured sequence
by manually accessing one of these two dialogs and selecting the Input from capture cache
check box.
Further information on how to generate a flat-field
correction may be found in §5.1.5.4.
5.1.5.3 Setup
Toolbutton:
Shortcut:
Related commands:
This menu item controls the configuration of the cache file
used when DigiFlow is capturing a digital video sequence directly from an
attached camera. As noted in §2.3.4, it is
important that the cache file is located on a disk other than that containing
the operating system, and that the capture file is in a single large contiguous
block, rather than many fragments scattered over the disk. Typically, the disk
drive will only be able to keep up with the camera if the drive can devote all
its time to writing the video data. This will not be the case if there is other
disk activity occurring for that drive (as would be the case if it contained
the operating system), or if the heads of disk drive have to continually move
backwards and forwards across the disk as would occur if the file becomes
fragmented.
Ideally, this menu item will be run when the capture disk is
empty (e.g. following a reformat of the disk) or at least nearly so. By
default the disk should be assigned the drive letter V: (either through the Disk Manager or
by net use V: …
onto a share) and the directory V:\Cache
should be created before running File: Live Video: Setup. (Details on how to change the
name or location of the cache file may be found in 13.2.)

Figure 30:
Configuration of the cache file for capturing video sequences.
Figure 30 shows the dialog that
is produced. It is recommended that the default size of 50GB is used. While
this may seem excessively large, if you make the file too small you may need to
offload all your data and reformat the hard disk to be able to create a single
large contiguous file at a later stage.
Note that if DigiFlow detects an existing V:\Cache\CaptureVideo.dfm, then this
dialog will not be produced. DigiFlow does not provide a mechanism for you to
remove or change the size of the cache file. If you must change the size, then
you should delete it from Windows Explorer then run File: Live Video: Setup again. Note,
however, that doing so may lead to fragmentation of this file, which may in
turn prevent the hard disks from keeping up with the bandwidth from the camera.
5.1.5.4 Calibrating a camera
Calibration of a video camera falls at two different levels.
On the one-hand, for some forms of processing, it is necessary to have a known
linear relationship between actual intensity and the digitised values.
Typically, all that is required here is to know the value to which black
digitises. This form of calibration is dealt with later in §6.1. However, for
some cameras, an additional low-level calibration is required to take into
account details of the image sensor where these are not ideal.
This section is divided into two parts: determining the
optimal black value for a camera, and generation of a flat-field correction.
Most cameras do not require either of these processes to be undertaken.
Optimising black
Most image sensors are sensitive not only to visible light,
but also to heat. Consequently, the output potentially depends on camera
temperature as well as the incident light. To counteract this, many cameras
have a built in method for eliminating or at least reducing the
temperature-dependent signal. For example, the image sensor may have some rows
of blacked off pixels to assess the temperature-induced component of the signal
from the sensor. For most cameras their built-in approach works fairly well,
although there are some where an additional calibration, adjustment or
correction is necessary.
Related to this is the desire, for most forms of processing,
to maximise the dynamic range available on the sensor. This includes ensuring
black is digitised to a low but nonzero value. The reason why having
black digitise to zero is that one cannot be sure whether it is digitised to
zero or a negative value. Some methods of determining black are discussed in §6.1.
Here we concentrate on the subset of cameras where the black offset can be set
in software but the camera’s own internal mechanism for setting this is not
sufficient. The DigiFlow cameras webpage (www.dalzielresearch.com/digiflow/cameras/)
indicates which cameras require such calibration.
Once completed, the calibration is stored in the Cameras folder within
the DigiFlow installation process and subsequently picked up automatically when
DigiFlow is started. (Note that in order to complete this calibration, you must
have write permission for this folder.) Unfortunately, for some cameras, it may
be necessary to redo this calibration from time to time if there are
significant differences in ambient temperatures, or if the camera is mounted
differently so that its equilibrium temperature changes.
To complete the calibration, start by opening a live view
(see §5.1.5.1) then use File:
Run Macro (§5.1.3) to navigate to the Wizards subfolder and run Wizard_Camera_OptimiseBlack.dfc.
The wizard will lead you through the process (see figure 31), which is
typically completed with the lens cap on so that no light is falling on the
image sensor.
Figure 31: Dialogs for Wizard_OptimiseBlack.dfc.
Although the wizard operates on the assumption that it is
the exposure time and not the frame rate which is of paramount importance, the
wizard lets you choose the frame rate to be used. It is recommended that this
is no less than one fifth of the maximum frame rate for the camera. The output
of the wizard is fit of the best possible black level over a range of exposure
times, the default maximum exposure time is slightly less than the reciprocal
of the frame rate, whereas the default minim is 1/5000 s. Again, the user has
the ability to adjust these.
For a given exposure, the definition of the optimal black is
based on an instantaneous count of the number of pixels that have an exactly
zero digitised value. By default, 2% (a fraction of 0.02) of the pixels are
permitted to be zero. The final pair of questions prior to starting the
calculation specifies the range of black values that the wizard should search
over. Note that the wizard can complete the task more rapidly if the lower
bound is set close to the actual level needed.
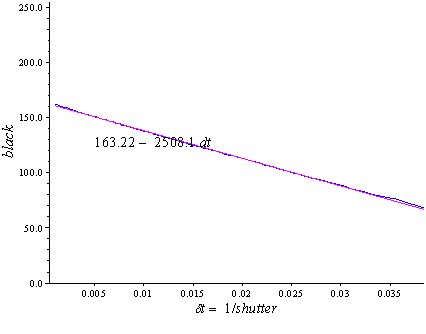
Figure 32: The
output from Wizard_OptimiseBlack.dfc.
While it is working the macro will show in the status bar
the various shutter speeds and black levels it is using. At the end, it
provides a plot of the data (in blue) and the best fit (in magenta) for the
optimal black. If desired, this best fit can be written automatically to the
appropriate folder (based on the BitFlow camera file name) within the DigiFlow\Cameras
folder.
Flat-field correction
The available flat-field corrections are stored in the Cameras folder within
the folder in which DigiFlow is installed. These comprise of a fixed field noise
and a gain. The wizard Wizard_Camera_FlatFieldCorrection.dfc
provides a mechanism for determining and setting up the flat field correction.
To run this wizard, open a live view with File: Live Video: Show Live Video (see §5.1.5.1)
then select File: Run Macro
(see §5.1.3) and navigate to the Wizards
subfolder and run Wizard_Camera_FlatFieldCorrection.dfc.
Where a flat-field correction is necessary, it will
generally be valid only for a particular shutter speed, hence the first
question asked by the wizard is what shutter speed you will be using. The
wizard will then set the camera to that shutter speed (if possible) and ask the
user to put the lens cap on so that the camera sees only black. Click OK once this has been
done, and the wizard will determine the time average black value over fifty
frames. The user is then asked to make the view white. This is the most
difficult and critical step. The user needs to illuminate the camera as
uniformly as possible, preferably using the same lens and aperture as will be
used subsequently. A good diffuser paced immediately in front of the lens is
essential for this (e.g., a number of thicknesses of tracing film or a
piece of opal acrylic), as is a fairly uniform light source to illuminate the
diffuser. The intensity of the digitised image should be in the upper half of
the range, but without any pixels saturating. Once this illumination has been
set up, click OK
and DigiFlow will again average the live video over fifty frames.
Once the averaging is complete, DigiFlow converts the
‘white’ image into a measure of the gain required to achieve a uniform
intensity relative to the ‘black’ image, and the user will be prompted to use
this to update the stored calibration. The default camera name under which to
save the calibration is based on the name of the camera file currently in use,
whereas the default name for the correction is a combination of the shutter
speed selected at the start and the date on which the calibration is made.

Figure 33:
Prompts controlling the generation of a flat field correction.
5.1.6 Edit Stream
Toolbutton:
Shortcut:
Related commands: process File_EditStream(..)
This option provides efficient editing of a single video
stream.
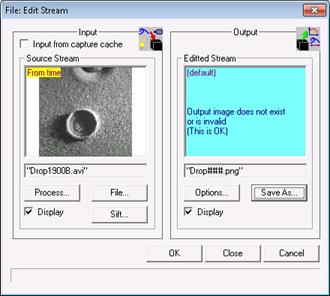
Figure 34: The Edit
Stream dialog for editing a single video stream.
Parts of the Source
Stream are copied to the Edited Stream; the parts to be copied
are determined by the Sift
button (see §4.3). Typically this is used to change
image file format, reduce the time period, select only specific frames, and/or
extract a subregion of the input stream. Note: if you do not click the Sift button when
setting up the input stream, then DigiFlow might prompt you by starting up the
sift dialog itself if it detects no or minimal changes are to be applied during
the editing process.
The Input
from capture cache check box disables the File and Process buttons, connecting instead the
input to the capture cache file (see §5.1.5.2), allowing you to extract
additional sequences from the cache file, if desired.
Toolbutton:
Shortcut:
Related commands: process File_CameraFile(..)
This option is a variant on File: Edit Stream (see §5.1.6). The
principal difference is that it provides the opportunity to apply a flat field
correction to the image while importing it from the cache used during a video
acquisition process. For many video cameras, there is little point using this
facility rather than File:
Edit Stream either as a flat field correction is undertaken in
the camera, or relatively little change is justified.
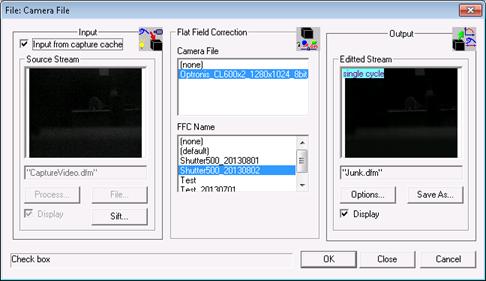
Figure 35: The Camera
File dialog for copying a video stream, optionally transforming it using a flat
field correction for the camera.
Parts of the Source
Stream are copied to the Edited Stream; the parts to be copied
are determined by the Sift
button (see §4.3). If selected, the intensities
will be transformed by a flat-field correction, specified by the combination of
the Camera File
and the FFC Name.
Typically, the input is taken from the capture file by checking Input from capture cache
and written out to a file format of the users choosing. Note: if you do not
click the Sift
button when setting up the input stream, then DigiFlow might prompt you by
starting up the sift dialog itself if it detects no or minimal changes are to
be applied during the editing process.
The Input
from capture cache check box disables the File and Process buttons, connecting instead the
input to the capture cache file (see §5.1.5.2), allowing you to extract
additional sequences from the cache file, if desired.
Details of how to generate a flat-field correction may be
found in §5.1.5.4.
5.1.8 Merge Streams
Toolbutton:
Shortcut:
Related commands: process File_MergeStreams(..)
This option allows two video streams to be merged into a
single stream to provide an extended sequence.
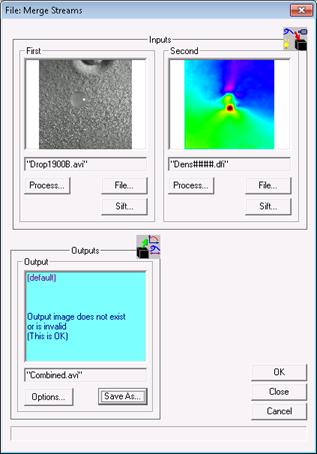
Figure 36: The Merge
Streams dialog for combining image streams sequentially.
Two input selectors are provided: First and Second. These are written to the Output selector in
the order suggested by their names. The timings of the two input selectors need
not correspond, but the regions must conform. The First selector is the master, dictating
the region to be used.
5.1.9 Export AVI
Toolbutton:
Shortcut:
Related commands: process File_ExportAVI(..)
This option provides an efficient mechanism for exporting a
sequence of images, drawings or a DigiFlow movie to a standard Windows AVI
movie file.
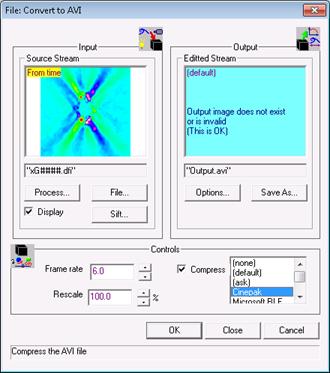
Figure 37: The Export AVI
dialog.
The dialog consists of a single input and a single output
selector. The latter should be directed to an .avi file. The playback speed of the
resulting .avi
file is set by Frame rate,
while Rescale
allows the input image to be rescaled (typically reduced in size) before
copying to the movie. If Compress
is not checked, then the full raw data is saved to the .avi file. If Compress is checked, then the type of
compression is determined by the list box to the right. Only a subset of the
compressions methods available are listed explicitly in this box. However,
specifying (ask)
will cause DigiFlow to prompt the user with the complete range of methods
available at the point where DigiFlow is ready to save the first image in the
output stream (i.e. the user will be prompted after OK has been clicked;
see figure 38).

Figure 38:
Compression options when exporting to an .avi file.
Toolbutton: 
Shortcut: ctrl+P
Related commands: print_view(..), ask_printer(..)
Print out the currently selected viewing window. The menu
version of this facility produces a dialog box allowing the user to select the
printer, whereas the toolbar version simply prints to the currently selected
printer.
5.1.11 Print
Visible View
Toolbutton:
Shortcut: shift+ctrl+P
Related commands: print_view(..), ask_printer(..)
This command is the same as File: Print View (see §5.1.10) except that only the currently visible part of
the view is printed.
5.1.12 Export to EPS
Toolbutton:
Shortcut:
Related commands: export_to_eps(..)
Converts the currently selected viewing window into an
Encapsulated PostScript (.eps)
file. Section 2.2.2 describes how to set up an .eps printer driver
that allows both bit image and vector graphics to be converted to .eps format. If the .eps printer is not
set up, then DigiFlow will convert vector graphics to a bit image before
generating the .eps
file.
When using the printer driver, not only can the user specify
the name of the output file (figure 39a), but some
control over the format is also provided (figure 39b).
In particular, a title may be added either above or below the figure, and the
figure may be given a frame. Further, using the Text filter group, it is possible to
suppress all text on a figure, or to replace each element of text with a unique
letter combination. These text filtering options are provided for convenience
with manuscript submissions where some journals wish all text removed from
figures, while others use systems such as the LaTeX \psfrag package to replace
the original text and fonts. Selecting Normal produces the eps containing the
original labels, whereas with either of the PSFrag options the text is replaced by a
unique character for each element. At the same time, DigiFlow creates a .tex file that
contains the mapping between these characters and the original text. This .tex file can then be
embedded in included in the main LaTeX document to reproduce the figure.
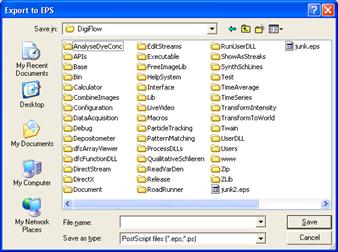
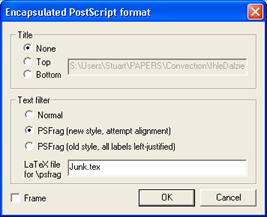
Figure 39: The dialogs
controlling the saving and formatting of the exported eps file.
For example, when the drawing shown in figure 40a is exported, all the text is replaced by single
characters. Close inspection shows that these characters appear to be
positioned incorrectly, but this is necessary to resolve differences between
the way Windows positions characters, and the way psfrag determines their
positioning from the eps file.
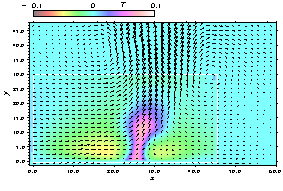
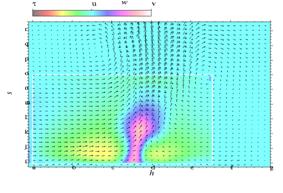
(a) (b)
Figure 40:
Example of exporting a drawing through psfrag with the PSFrag
(new sytle) option. (a) Before exporting. (b) The resulting eps file.
At the same time as producing the eps file, DigiFlow also
generates the following LaTeX file that contains a psfrag wrapper:
\begin{figure}
\psfrag{a}[cc][Bl]{$0.0$}
\psfrag{b}[cc][Bl]{$10.0$}
\psfrag{c}[cc][Bl]{$20.0$}
\psfrag{d}[cc][Bl]{$30.0$}
\psfrag{e}[cc][Bl]{$40.0$}
\psfrag{f}[cc][Bl]{$50.0$}
\psfrag{g}[cc][Bl]{$60.0$}
\psfrag{h}[cc][Bl]{$x$}
\psfrag{i}[cr][Bl]{$0.0$}
\psfrag{j}[cr][Bl]{$5.0$}
\psfrag{k}[cr][Bl]{$10.0$}
\psfrag{l}[cr][Bl]{$15.0$}
\psfrag{m}[cr][Bl]{$20.0$}
\psfrag{n}[cr][Bl]{$25.0$}
\psfrag{o}[cr][Bl]{$30.0$}
\psfrag{p}[cr][Bl]{$35.0$}
\psfrag{q}[cr][Bl]{$40.0$}
\psfrag{r}[cr][Bl]{$45.0$}
\psfrag{s}[Bc][Bl]{$y$}
\psfrag{t}[Bc][Bl]{$-0.1$}
\psfrag{u}[Bc][Bl]{$0$}
\psfrag{v}[Bc][Bl]{$ 0.1$}
\psfrag{w}[Bc][Bl]{$T'$}
\includegraphics{junk2.eps}
\end{figure}
Each of the \psfrag{..}[..][..]{..} statements gives
the letter code, the required alignment relative to the point specified in the
eps file, how the point specified in the eps file relates to the character
rendered in the eps file, and finally the text to be typese in place of the
letter code. Due to incompatibilities between Windows and psfrag, it is
necessary for DigiFlow to position the characters in the eps file above and to
the right of the reference point or else confusion arises in the height and
width of the string. Thus each of the entries has [Bl] as the second of the positioning
codes. The LaTeX text, however, is rendered in the correct place via the first
of the positioning codes, as illustrated in figure 41a,
although if there is a change in the size of the font some further adjustments
may be necessary to improve the spacing between some elements. Here, for
example, the font size has been increased and the x axis and y axis titles
would look better if they were moved away from the axes. This may be achieved,
for example, by adding \raisebox(..)(..) in the
above example. In particular,
\psfrag{h}[tc][Bl]{\raisebox{-10 pt}{$x$}}
\psfrag{s}[Bc][Bl]{\raisebox{5pt}{$y$}}
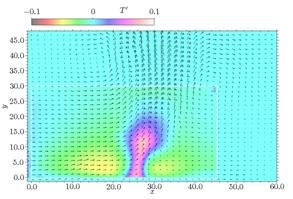
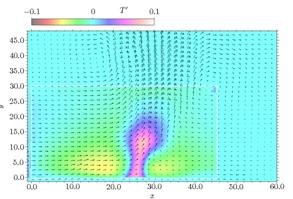
(a) (b)
Figure 41:
LaTeX output using automatically generated psfrag replacements. (a) Straight
from the LaTeX generated by DigiFlow. (b) After small adjustments to the
positions of the x and y axis labels.
Such adjustments are less frequently necessary if the
original graphic is produced with text of much the same size as will be used in
the final version. With DigiFlow drawings, this may be achieved readily by
including a call to draw_set_base_scales(..) near the
start of the drawing.
Note that .eps
files may also be specified for the output stream from most of DigiFlow’s menu
options. If this is done, then the dialog in figure 39b
replaces that normally produced by the Options button.
Some journals require the figures to be complete as .eps files rather than
relying on \psfrag within the LaTeX. This does not prevent you, however, from
using \psfrag in their production. The following process allows you to process
the text with LaTex and end up with a stand-alone .eps file.
1.
1. Include the graphic plus all the psfrag commands in a
LaTeX file with \thispagestyle{empty}.
Probably best if standard PostScript fonts are used, so have something like:
\documentclass{article}
\usepackage{psfrag}
\usepackage{mathptmx} % PostScript fonts
\usepackage[T1]{fontenc}
\thispagestyle{empty}
\begin{document}
\input{myfig} % The figure in myfig.tex
\end{document}
2.
Compile to create the .dvi and .ps, as normal. The output should all be
on a single page.
3.
Open the output .ps with GhostView. Select PS to EPS from the File menu. Select Automatically calculate BoundingBox,
give the file a name (e.g. myfig.eps) and save.
4.
Check that the myfig.eps can be read OK and has the
correct bounding box.
5.1.13
Export Visible to EPS
Toolbutton: ý
Shortcut:
Related commands: close_view(..)
This command is equivalent to File: Export to EPS (see §5.1.12) except that only the currently visible part of
the view is used to generate Encapsulated PostScript.
5.1.14
Export to simple EPS
Toolbutton:
Shortcut:
Related commands: export_to_simple_eps(..)
The standard method of generating PostScript, described in §5.1.12,
utilises a Windows printer driver to make the conversion. Vector graphics
remain as vectors, while raster images remain as rasters. However, the
Encapsulated PostScript produced tends to be cumbersome. Occasionally,
Encapsulated PostScript with a simpler structure is desired. The present Export to simple EPS
option does not utilise the Windows printer driver, but generates the
Encapsulated PostScript directly. The big limitation of this option, however,
is that it only produces raster formatted files. If applied to vector drawings,
then these are first converted to a raster format.
5.1.15 Close
Toolbutton: ý
Shortcut: ctrl+W
Related commands: close_view(..)
Close the active window. This is equivalent to clicking on
the close button ý
at the top right corner of the document window.
5.1.16 Close All
Toolbutton:
Shortcut:
Related commands: close_all_views(..)
Close all open views.
5.1.17 Exit
Toolbutton:
Shortcut:
Related commands: exit_digiflow(..)
Closes DigiFlow and all open image windows. This is equivalent to clicking on the close button ý at the top right corner of the main DigiFlow window. If
DigiFlow detects that any processes are currently running then it will prompt
the user to ensure DigiFlow should still be closed as this will terminate those
processes.
5.2 Edit
5.2.1 Copy
Toolbutton: 
Shortcut: shift+ctrl+C
Related commands:
Copies the currently selected image or drawing to the system
clipboard. The image or drawing is available to other applications in both
raster and metafile formats.
5.2.2 Copy as Bitmap
Toolbutton: 
Shortcut: ctrl+alt+C
Related commands:
Copies the currently selected image or drawing to the system
clipboard, placing it there as a bitmap regardless of its initial form.
5.2.3 Copy as Text
Toolbutton: 
Shortcut: shift+ctrl+alt+C
Related commands:
Copies the file name or description of currently selected
image to the system clipboard.
5.2.4 Zoomed Copy
Provides a group of options that allow images to be copied
to the clipboard at a size that differs from the full resolution image.
5.2.4.1 Double size
Copies the currently selected image to the system clipboard,
doubling the size of the image using bicubic interpolation, where appropriate.
5.2.4.2 Full size
Toolbutton:
Shortcut: shift+ctrl+C
Related commands:
Identical to Edit Copy (§5.2.1).
Copies the currently selected image to the system clipboard, doubling the size
of the image using bicubic interpolation, where appropriate.
5.2.4.3 Half size
Toolbutton:
Shortcut: shift+ctrl+alt+C
Related commands:
Copies the currently selected image to the system clipboard,
halving the size of the image first.
Copies the currently selected image to the system clipboard,
reducing the linear resolution of the image by a factor of three.
5.2.4.4 Quarter size
Copies the currently selected image to the system clipboard,
reducing the linear resolution of the image by a factor of four.
5.2.4.5 Zoom
Copies the currently selected image to the system clipboard,
adjusting the resolution using a user-specified factor (see figure 42).
Figure 42: Dialog
selecting scale factor for image to be placed on clipboard.
5.2.5 Properties
Toolbutton: 
Shortcut: ctrl+\
Related commands: read_image_details(..)
Displays the properties for the selected window.
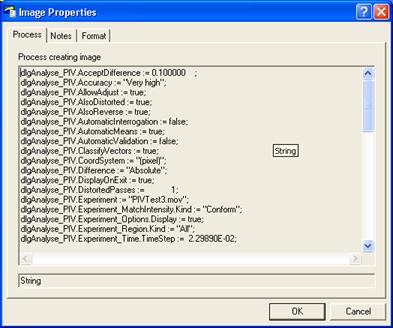
Figure 43:
Process that created the image.
The Process
tab contains comments supplied by the user at the time when the image was
created. Note that this tab is only available when the image is supplied by a
file format that supports the storage of this information. The contents here is
exactly that that invoked the command (either interactively or from a dfc macro).

Figure 44: User
comments.
The Notes
tab contains comments supplied by the user at the time when the image was
created. Note that this tab is only available when the image is supplied by a
file format that supports comments.
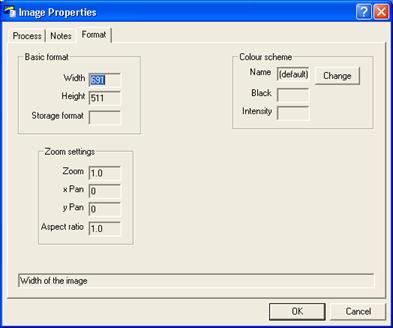
Figure 45: Image format.
The Format
tab contains information describing the format of the image. This information
is available for all image types.
5.2.6 Coordinates
Toolbutton:
Shortcut:
Related commands: coord_system_create(..),
coord_system_mapping(..), coord_system_add_point(..),coord_system_destroy(..), coord_system_set_default(..),coord_system_list(..),
coord_system_mapping(..),coord_system_get_mapping(..), coord_system_get_points(..),coord_system_translate(..),coord_system_translate_pixel(..),
coord_system_units(..), coord_system_apply_region(..),
pixel_coordinate(..), world_coordinate(..)
Provides the ability to define, edit and delete coordinate
systems providing a mapping between the pixel coordinates of an image and some
user-defined coordinate system.
Note that once defined, the coordinate system is stored in
the DigiFlow_Status.dfs
file in the directory from which DigiFlow was started. This file uses the
standard dfc
syntax but is run automatically upon starting DigiFlow. In some cases you may
wish to make a copy of the relevant part of the coordinate system for backup
purposes.
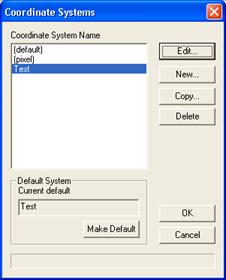
Figure 46:
Selection of coordinate system.
The top-level dialog provides the ability to select the
active coordinate system for the current window by clicking on the desired
entry in the list box, or to make changes to the available coordinates.
The Edit,
New and Copy buttons are used
to adjust an existing coordinate system, create a new coordinate system, or
create a copy of an existing coordinate system (respectively). A more complete
description of these buttons is given below. The Delete button will remove the currently
selected coordinate system from DigiFlow, while Make Default will register the selected
system as the default for other operations.
Note: details of all coordinate systems defined, and which
system is the current default, are stored in the DigiFlow_Status.dfs file located in the
directory from which you started DigiFlow. These details are local to instances
of DigiFlow started from that directory, although you may either copy the DigiFlow_Status.dfs
file to another directory, or open it in an editor and extract the details of
the coordinate system for use in a dfc macro. Refer to §
5.2.6.1 New coordinate system button
To create a new coordinate system, click on New. This starts a
dialog allowing the name, type and units of the new coordinate system to be
specified.
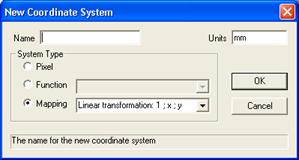
Figure 47:
Give a name and type to the new coordinate system.
The Name
of the coordinate system is arbitrary. The user should select a name that is
meaningful to the task at hand. This name will subsequently be used for
identifying the coordinate system. The Units are also arbitrary. They may refer
to some standard measure of length, or to a dimensionless unit. The name of
these units is recorded for later use in captions, titles, etc.
There are three possible types of coordinate system that may
be specified. Pixel
coordinates have a one to one correspondence with the pixels in the image and
are the least flexible.
Function
coordinates have a user-specified mapping between the pixel and user
coordinates. This form of mapping is the most precise, but will only be of use
where there is some external method of determining the required mapping
functions. Four functions are required, separated by semicolons. The first two
functions give the world x and y
coordinates as functions of the pixel coordinates i
and j, while the third and fourth give the pixel
coordinates as functions of the world coordinates.
Mapping
coordinates are generally the most useful. These systems are specified through
a combination of mapping functions and identification points where both the
pixel and user coordinates are known. A least squares mapping is then used to
generate the unknown coefficients in the mapping functions and complete the
transformation. There are a number of pre-defined mapping functions, or the
user may specify their own. The format of the mapping function specification is
an arbitrary name followed by a colon then a list of basis functions, each
separated by a semicolon and expressed in terms of the generalised coordinates x and y, and optionally the time t. The points defining the unknown coefficients are
specified using the Edit
button of the parent dialog.
5.2.6.2 Edit coordinate system button
The Edit
button starts a dialog that may be used to edit the Units and Mapping functions for the coordinate
system. As noted above, the coordinate system may also be time dependent, in
which case Use Time-dependent
Mapping should be checked and the points defining the coordinate
system should span both space and time.
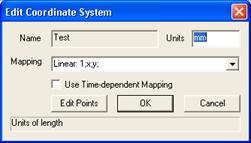
Figure 48:
Editing coordinate systems.
To specify the points used for the mapping, the Edit Points button
should be clicked, which will allow the user to specify points in the window
that was active before entering the coordinate system dialogs. At the same time
a modeless dialog box, which should be used to indicate the specification of
the points is complete, is started.
Coordinate points are specified within the window by
clicking at the desired location. This places a plus mark (+) at the position.
The plus mark may then be dragged to a new location, if desired.
Double-clicking the plus mark activates a dialog for specifying the user
coordinates for this point.

Figure 49:
World coordinates for a point when defining a coordinate system.
This dialog gives the current Pixel Position of the point (and allows
this to be edited), and provides the ability for the user coordinates to be
defined in the World Position
group. If a time-dependent mapping were specified, then the Time for this point must also be
specified.
Clicking Delete
will remove the point, while checking Lock will prevent the point being
dragged around the image accidentally.

Figure 50:
Indicate that you have finished editing the coordinate system markers.
When you have finished adding and/or editing the coordinate
system markers, click the Finished
button in the dialog shown in figure 50.
5.2.6.3 Copy coordinate system button
The Copy
button provides the ability to make a copy of an existing coordinate system.
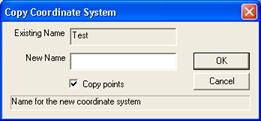
Figure 51:
Copy a coordinate system.
5.2.6.4 Coordinate system creation
wizard
As an alternative to manually defining a coordinate system
as outlined in the above subsections, DigiFlow provides a wizard for this
purpose. This wizard, Wizard_CoordSystem.dfc,
takes the form of a dfc
macro and can be found in the folder in which DigiFlow is installed. The
purpose of the wizard is to take an image of a regular grid of features,
location the features and form a coordinate system from them.
One way of forming the grid of regular features is to use
one of the CoordinateSystemGrid_*.pdf
files found in the DigiFlow installation folder. When printing these out, make
sure they are printed at the correct scale rather than ‘shrink to fit’! These
grids, constructed from the following PostScript segment, can readily be
printed out on paper or overhead transparency and placed in the flow. (It may
be necessary to laminate a paper grid!)
%!PS-Adobe-3.0
% Select paper size (e.g. a4 or a2)
a4
/inch {72 mul} def
/mm { 25.4 div inch } def
% Make all subsequent measurements in mm
1 mm dup scale
% Set the spacing of the features
/FeatureSpacing 10 def
/radius 0.75 def
% Page size: can be much bigger than the actual page size!
/Width 1000 def
/Height 1000 def
0 setgray % Make black
0 FeatureSpacing Height
{/y exch def
0 FeatureSpacing Width
{/x exch def
x y radius
0 360 arc
closepath % make sure start and end are connected
fill}
for}
for
# Set the number of identical copies you want and print
/#pages 1 def
showpage
%%EOF
Figure 52
shows such an image captured from such a coordinate system grid. Here the grid
was printed with features spaced at 20mm on an A2 format with the subsequent
pages laminated and then carefully taped together. Once you have an image of
your grid, simply start the wizard and it will lead you step-by-step through
the definition of your coordinate system. Note, however, that the wizard
requires the actual coordinate system to be closely aligned with the pixels and
that the mapping required for the coordinate system is close to linear.
Figure 52: Image of coordinate system grid used with the
Coordinate System Wizard.
5.2.6.5 Coordinate system
test wizard
This wizard, Wizard_TestCoordinateSystem.dfc,
is intended as a tool for checking the consistency and accuracy of a coordinate
system and, optionally, removing points defining the coordinate system that may
be outliers (e.g. due to them having incorrect data assigned to them).
When run, the wizard will lead the user through the process.
5.2.7 Region
Toolbutton:
Shortcut:
Related commands: region_create(..), region_destroy(..), get_region(..), region_list(..)
In most cases the creation and modification of regions is
handled as part of the sifting process started with the Sift button when specifying an input
image stream, as described in §4.3.2. In some
cases, however, it may be desirable to specify a region independently from
processing any images (e.g. creating a region used during the capture of
live video, as seen in §5.1.5.2). Selecting Edit: Region will
start up a dialog containing only the Regions tab from the normal Sift dialog, as shown
in figure 53. The only point in invoking this is to
look at, define or modify a named region. The only lasting effect of this
dialog is any changes in the definition(s) of named regions.
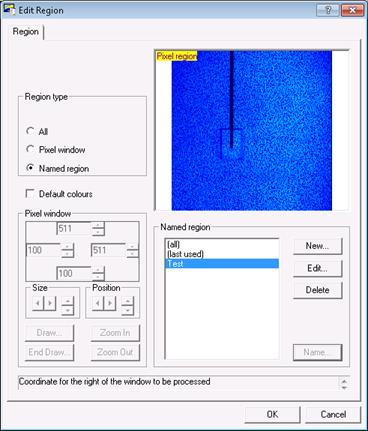
Figure 53: The Region tab from the Sift dialog
is produced in response to Edit: Dialog.
5.2.8 Process
again
Toolbutton: 
Shortcut:
Related commands: get_process_details(..)
Users often wish to reprocess an image, perhaps making minor
changes to the control settings, or maybe to apply the same process to a
different set of images. The Process again facility provides a
convenient method for doing this.
To use this feature, simply open the image for which you
wish to replicate the process, and click on the Process again button (or select
from the Edit menu). DigiFlow will then recover the process settings from the
image and, where possible, use them to initialise the dialog that was initially
used to create the image.
Note that this feature only works with DigiFlow-specific
formats such as .dfi,
.dfd or .dft files as other
formats do not provide an appropriate mechanism for storing the settings used
to create the image.
5.2.9 Dialog responses
The purpose of this facility is to provide an aid for those
trying to create dfc
files (see §8) to run processes, and to provide an
alternative user interface to many of the DigiFlow processing facilities.
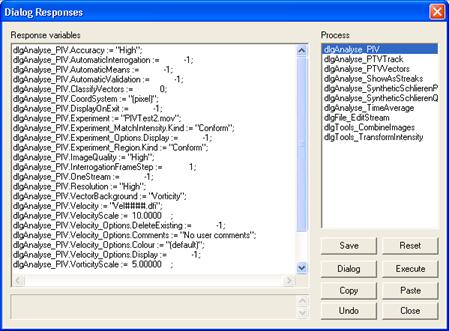
Figure 54: The
Dialog Responses dialog that contains details of the responses corresponding to
the latest invocations of the dialogs.
The Process
list box indicates the dialog for which responses are required. This list is
empty when DigiFlow is first started in a directory, but gradually fills as
more DigiFlow features are used. Upon exit from DigiFlow, all this information
is saved in the DigiFlow_Dialogs.dfs
file that is created in the DigiFlow start directory.
Selecting a dialog from the Process list causes the corresponding
response lines to be displayed in the Response variables edit box on the
left-hand side of the dialog. Note that the entries in this edit control are
always displayed in alphabetical order, and the list will only contain
assignment statements. Entries in the edit box may be edited, selected, copied,
etc., as is standard for edit boxes. Users may find it useful to copy
the contents of this edit box to .dfc
files they are creating.
If the responses variables are edited, then they may be
saved by clicking Save;
alternatively Reset
restores them to their previous values. The user will also be prompted to save
any alterations if a different dialog is selected from the list.
The corresponding dialog may be started (e.g. to
provide updated values) by clicking the Dialog button, while clicking Execute will cause
the corresponding process to be started.
5.2.10 dfcConsole
Toolbutton: 
Shortcut: ctrl+E
Related commands:
The dfcConsole
provides an interactive tool for writing, editing and debugging dfc macro code.
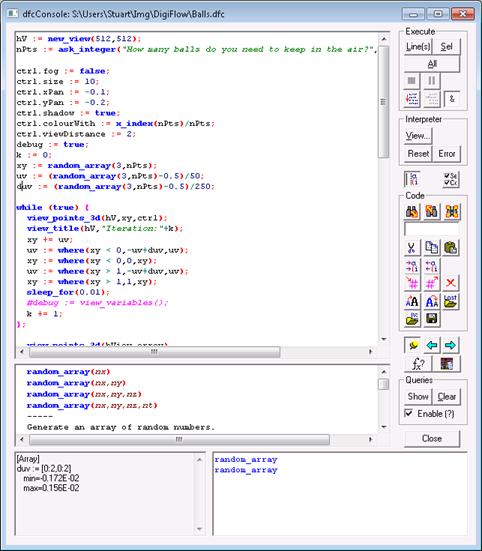
Figure 55: The dfcConsole dialog is resizable.
This resizable window contains an edit control allowing
interactive editing of the dfc
code to be run, alongside a series of controls allowing control over the
execution environment and providing timely information.
The main window (top left) in the dfcConsole allows interactive editing of
dfc code.
Syntax is colourised and, matching parentheses, braces and square brackets are
highlighted as they are entered (or when the <shift> key is depressed
adjacent to a bracket). The buttons in the Code group down the right-hand side
provide the basic editing functionality in conjunction with standard short cuts
such as ctrl+Z for undo (or shift+ctrl+Z for redo).
The Execute
group may be used to selectively execute code. If there is no text selected,
then Line(s)
will execute the current line. If there is an active selection, then Selection will execute
the selected code, and Line(s)
will execute not only the selected text, but all the lines on which some text
is selected. Regardless of the selection, All will cause the entire code to be
executed. If Auto reset
is checked, then using All
will first discard any existing variables, etc., from the interpreter.
Note that <alt><enter>
is equivalent to clicking Line(s).
Most of the control buttons are disabled while the code is
executing. Amongst the exceptions are the stop  and pause
and pause  buttons. Clicking the stop button will abort the
currently executing code, while the pause button will temporarily suspend
execution. When toggled, the
buttons. Clicking the stop button will abort the
currently executing code, while the pause button will temporarily suspend
execution. When toggled, the  will cause the line currently being executed
to be displayed regularly (at intervals of about 1s) in the bottom-left control
of the console. If not toggled, then the
will cause the line currently being executed
to be displayed regularly (at intervals of about 1s) in the bottom-left control
of the console. If not toggled, then the  button will cause the line currently being
executed to be displayed when it is clicked. Checking Breaks (&) causes break points,
indicated by an ampersand in the code (see §8.12.5)
to be executed as and when they are found by the interpreter. If cleared, then
the break points are ignored. Note that the status of the Breaks (&) control may be changed by
the user as the dfc
program runs.
button will cause the line currently being
executed to be displayed when it is clicked. Checking Breaks (&) causes break points,
indicated by an ampersand in the code (see §8.12.5)
to be executed as and when they are found by the interpreter. If cleared, then
the break points are ignored. Note that the status of the Breaks (&) control may be changed by
the user as the dfc
program runs.
The Interpreter
group controls the internal state of the DigiFlow interpreter. Reset will clear all
variables and functions from the interpreter, while View displays the variables and objects
defined within the interpreter using the view_variables(..) interface. If an error occurs, then
Last Error will
redisplay the last error message.
Below the code window is a documentation window. When
DigiFlow detects a function name under the cursor in the code window then it
will display the documentation for this function. This documentation (which is
also accessible through the dfc
help facility) is hyperlinked to aid navigation. Standard forward and back
navigation buttons are provided to the right of the window. A given help topic
may be pinned (or unpinned) using  , or by double tapping the <alt> key on
the keyboard. Double-clicking on a line from within the documentation window
will cause the corresponding text (e.g. the definition of the entry
point for a function) to be inserted at the cursor in the main edit window.
, or by double tapping the <alt> key on
the keyboard. Double-clicking on a line from within the documentation window
will cause the corresponding text (e.g. the definition of the entry
point for a function) to be inserted at the cursor in the main edit window.
The two windows at the bottom of the dfcConsole provide information about the
contents of variables. When the cursor is on a variable name, and that variable
has a defined value (typically the result of executing part of the code), then
a summary of its contents will be displayed in the left-hand window.
The bottom right-hand window serves two separate functions.
As the user types in code, a list of possible corresponding function names will
be shown in this window. Double-clicking on any of the entries in the list will
cause the corresponding help text to be displayed in the documentation window.
This provides a convenient method of determining the name and usage of the most
appropriate function if you do not know its name in advance. At run-time the
bottom right-hand window takes on a different role and displays the output
resulting from a Query
(see §8.12.4 for further details). The Show button in the Queries group may be
used to switch between the possible function list and the query output whilst
editing code.
Standard file open  and save
and save  buttons are provided to handle dfc code, along with
a dedicated button
buttons are provided to handle dfc code, along with
a dedicated button  to reopen the last dfc code edited. The dfcConsole will automatically reopen the
last code edited if it did not complete cleanly its execution, and also saves
snapshots of the code prior to execution, etc., in DlgResponses.log.
to reopen the last dfc code edited. The dfcConsole will automatically reopen the
last code edited if it did not complete cleanly its execution, and also saves
snapshots of the code prior to execution, etc., in DlgResponses.log.
The search facility is provided by a group of three buttons,
 ,
,  and
and  , that search
forwards or backwards for, or highlight all the text that matches that in the
edit box beneath the buttons. Cut (ctrl+X or
, that search
forwards or backwards for, or highlight all the text that matches that in the
edit box beneath the buttons. Cut (ctrl+X or  ), copy (ctrl+C or
), copy (ctrl+C or  ) and paste (ctrl+V or
) and paste (ctrl+V or  ) operate in the standard way.
Additionally, indenting (ctrl+space
or
) operate in the standard way.
Additionally, indenting (ctrl+space
or  ),
unindenting (shift+ctrl+space
or
),
unindenting (shift+ctrl+space
or  ),
commenting (ctrl+/
or
),
commenting (ctrl+/
or  ) and
uncommenting (shift+ctrl+/
or
) and
uncommenting (shift+ctrl+/
or  ) can
help with the laying out and testing/documenting of dfc code.
) can
help with the laying out and testing/documenting of dfc code.
Utility buttons to delete all code  , help
, help  and code library
and code library  buttons are provided for
convenience. Similarly, the font size may be increased
buttons are provided for
convenience. Similarly, the font size may be increased  or decreased
or decreased  .
.
Information about where a running code is currently
executing can be found by clicking the button. This will cause the line currently
being executed to be displayed in the dfc help window at the bottom of the
console. Similarly, clicking turns on (or off) automatic display of the
line currently being executed, updated typically every second. Note that these
facilities can have a significant impact on the execution speed.
When toggled, the smart indent button,  , will attempt to align
elements of the code in an intelligent way. The settings button,
, will attempt to align
elements of the code in an intelligent way. The settings button,  , opens the subdialog
shown in figure 56. This dialog controls
syntax and variable highlighting, and whether the calculator interpreter is
automatically reset each time All
is clicked.
, opens the subdialog
shown in figure 56. This dialog controls
syntax and variable highlighting, and whether the calculator interpreter is
automatically reset each time All
is clicked.

Figure 56: dfcConsole settings for controlling syntax
highlighting, etc.
Note that using either the Close or x
buttons to close the window will prompt to save the dfc code it contains. This feature is
bypassed if you close the main DigiFlow window which will simply close the
window without prompting for the dfc code to be saved.
5.3 View
5.3.1 Zoom
5.3.1.1 In
Toolbutton: 
Shortcut: alt+Z, or
up_arrow
Related commands: view_zoom(..)
Zoom in the current window by a factor of two. Note: if the ctrl key is held
down while clicking the toolbutton or using the up arrow, then the window is
resized to fit the new zoom.
5.3.1.2 Out
Toolbutton: 
Shortcut: shift+alt+z,
or down_arrow
Related commands: view_zoom(..)
Zoom out the current window by a factor of two. Note: if the
ctrl key is
held down while clicking the toolbutton or using the down arrow, then the
window is resized to fit the new zoom.
5.3.1.3 Full size
Toolbutton: 
Shortcut: ctrl+1
Related commands: view_zoom(..)
Zoom the current window to full size (one pixel on the
display for each pixel in the stored image). Note: if the ctrl key is held down while clicking the
toolbutton, then the window is resized to fit the new zoom.
5.3.1.4 Custom
Toolbutton:
Shortcut:
Related commands: view_zoom(..)
Starts the zoom dialog box that allows a broader range of
zooms to be selected, and also allows specification of the aspect ratio for the
displayed image.

Figure 57: The custom
zoom dialog box.
The two slider controls are linked with the two edit boxes.
The Zoom
setting controls the number of pixels on the display used to display a single
pixel in the stored image in the horizontal direction. In contrast, the Aspect Ratio control
determines the shape of the virtual pixels to be displayed. For images captured
through DigImage, the aspect ratio should be set to 0.68 for PAL systems, or
0.75 for NTSC, thus recovering the original aspect ratio of the images.
5.3.1.5 To Window
Toolbutton: 
Shortcut: shift+ctrl+Q
Related commands: view_zoom_to_fit(..), view_zoom_all_to_fit(..)
Changes the zoom to fit the current window.
5.3.1.6 All Full Size
Toolbutton:
Shortcut: shift+ctrl+1
Related commands: view_zoom_all(..)
Changes the zoom of all windows to 100%, and fits the
windows to the size of the images.
5.3.1.7 All Half Size
Toolbutton:
Shortcut: shift+ctrl+2
Related commands: view_zoom_all(..)
Changes the zoom of all windows to 50%, and fits the windows
to the size of the images.
5.3.1.8 All Third Size
Toolbutton:
Shortcut: shift+ctrl+3
Related commands: view_zoom_all(..)
Changes the zoom of all windows to 33%, and fits the windows
to the size of the images.
5.3.1.9 All Quarter Size
Toolbutton:
Shortcut: shift+ctrl+4
Related commands: view_zoom_all(..)
Changes the zoom of all windows to 25%, and fits the windows
to the size of the images.
5.3.2 Fit Window
Toolbutton: 
Shortcut: ctrl+Q
Related commands: view_fit_to_zoom(..), view_fit_all_to_zoom(..)
Resizes the current window so that it fits the zoom of its
contents.
5.3.3 Cursor
Under all cursor modes, holding down the left mouse button
will cause a duplicate cursor to be displayed at the same pixel location on all
the other open image windows. At the same time, the current intensity and other
related data (e.g. velocity) will be displayed in the status bar for
that window. This feature is valuable when trying to assess the relationship
between features in different images. As described below, the cursor can also
be set to display other information or to perform other tasks when the buttons
are clicked.
If you hold down alt and click the left mouse button, then the duplicate
cursor will continue to be displayed in the location of the click on all
windows (and on the window you clicked) until you click again without the ctrl key held down.
(Clicking again while holding down ctrl will cause a further duplicate to be placed on all
the windows, and so on.)
|
|
Left
|
Middle
|
Wheel
|
Right
|
|
|
Click: Show duplicate cursor
on all windows.
|
Click: Play/pause movie or
sequence.
Drag: Move rapidly through a
movie or sequence.
|
Step through movie or sequence
|
|
|
shift
|
Drag: Scroll (pan) current
view.
|
|
Zoom current view.
|
|
|
ctrl
|
|
Click: Play/pause movie or
sequence in all views*.
Drag: Move rapidly through
all movies or sequences*.
|
Step through movie or
sequence in all views.
|
|
|
alt
|
Click: Add cursor marker to
all windows (removed by next click)
|
|
|
|
|
shift+ctrl
|
Drag: Scroll (pan) all views.
|
Click: Move all movies or
sequences to frame of the clicked view.*
|
Zoom all vies.
|
|
|
shift+alt
|
|
|
|
|
|
ctrl+alt
|
|
|
|
|
|
shift+ctrl+alt
|
|
|
|
|
*Sequence animation controls only operate on views that
do not have their synchronisation button activated.
5.3.3.1 Show Where
Toolbutton: 
Shortcut: ctrl+alt+M (ctrl+M
to turn off)
When the left mouse button is held down on an image, a popup
window will appear next to the cursor showing the current pixel and (if
defined) world coordinates. Clicking the right button (while the left button is
still depressed) will produce a message box showing the coordinates, as seen in
figure.
Figure 58: The
message box produced when the right-hand mouse button is clicked whilst the
left-hand button is held down. The coordinate i,j is
in pixel coordinates, while x,y are in the current
world coordinates. In this case a velocity field was being explored and U and V represent the velocity,
and S gives the scalar field (here vorticity) on
which the velocity is displayed.
5.3.3.2 Measure Distance
Toolbutton: 
Shortcut: shift+ctrl+M (ctrl+M
to turn off)
When the left mouse button is held down on an image, a popup
window will appear next to the cursor showing the distance between where the
left-hand button was depressed and the current location of the mouse pointer.
Clicking the right button (while the left button is still depressed) will
produce a message box showing the distance.
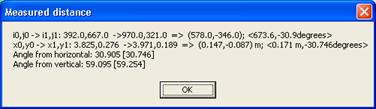
Figure 59: The
message box produced when measuring distances with the cursor. The first line
gives the pixel coordinates of the start and end points, along with the Dx
and Dy in pixels (within brackets) and the distance and angle
(within <..> pairs). The second line repeats this for world coordinates.
The last two lines give the principal angle from horizontal and vertical,
respectively, for the line with the first value in each case being in pixel
coordinates, whist the second gives the same information with reference to the
world coordinate system.
5.3.3.3 Move Image
Toolbutton: 
Shortcut: shift+ctrl+alt+M
(ctrl+M to turn off)
When the left mouse button is held down on an image, moving
the mouse will pan the image. The mouse wheel can be used to zoom the image.
Note that holding down shift while using the mouse will
temporarily activate this feature regardless of the toolbar settings.
5.3.3.4 Move All Images
Toolbutton: 
Shortcut:
Similar to Move Image (§5.3.3.3), but moves and zooms all
open images.
Note that holding down shift+alt while using the mouse will
temporarily activate this feature regardless of the toolbar settings.
5.3.4 Vectors
5.3.4.1 Increase Length
Toolbutton: 
Shortcut:
Related commands:
Increase the length of velocity vectors and similar arrows.
For finer control, see View:
Appearance (§5.3.5).
5.3.4.2 Decrease Length
Toolbutton: 
Shortcut:
Related commands:
Decrease the length of velocity vectors and similar arrows.
For finer control, see View:
Appearance (§5.3.5).
5.3.4.3 Reset Length
Toolbutton: 
Shortcut:
Related commands:
Resets the length of velocity vectors and similar arrows to
their defaults. For finer control, see View: Appearance (§5.3.5).
5.3.5 Appearance
Toolbutton: 
Shortcut: ctrl+A
Related commands:
This tool provides a variety of tools for adjusting the
appearance of an image. The scope of the tools depends on the format of the
image; in particular, if the image is integer or floating point, and whether it
contains a single plane of information or multiple planes.
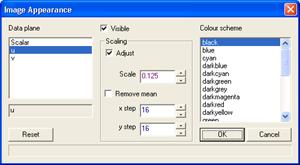
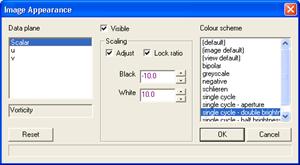
Figure 60: Dialog for
adjusting the appearance of an image. This example shows the features available
for an image containing a velocity field.
The Data
plane control will show the data planes available within the
image. For simple images, only one data plane will be listed, but for velocity
fields, for example, both velocity (vector data) and a background image (scalar
data) will be listed. The appearance of each data plane type can be changed by
selecting it in the Data
plane control, then making the required adjustments. For example,
if a velocity plane is selected, then the scale of the vectors, the spacing
between the vectors, and the colour in which they are plotted may all be
changed. Additionally, a check box allows the removal of any mean velocity. For
scalar data, the colour scheme and the mapping between the scalar values and
the limits of the colour scheme can be changed. Some of this latter
functionality is also available through the Colour scheme dialog – see §5.3.6.
5.3.6 Colour scheme
Toolbutton: 
Shortcut: shift+ctrl+C
Related commands: view_colour(..), colour_scheme(..), add_colour_scheme(..), delete_colour_scheme(..)
Used to select the colour scheme for the active image, or
define a new colour scheme. The Select
Colour Scheme dialog box invoked by this option provides the ability
to add, remove and alter colour schemes.

Figure 61: Dialog used
for selecting the colour scheme for an image.
A specific colour scheme may be selected by clicking on
the name in the list box. The (image
default) scheme is the scheme in use when the window was created.
The (view default)
is that in use for the image when this dialog was entered.
Note: This dialog is modal for free versions of the DigiFlow
licence, but modeless (allowing switching between other elements of DigiFlow)
for full licences.
Checking Adjust
intensity and moving the sliders or typing a value into the
associated edit boxes may alter the appearance of a given scheme. For example,
by setting Black
to 1.0 and Saturation
to –1.0, a scheme with the negative colours may be produced. Colour schemes
created and added through the dfc
function add_colour_scheme(..) are saved in DigiFlow_Status.dfs
and will be included in the list of available schemes.
Clicking on Add
brings up a dialog for adding new colour schemes. Details of these new schemes
are added to the DigiFlow_Status.dfs
file and thus remain available the next time DigiFlow is started in the same
directory.
Figure 62: Add a
new colour scheme.
DigiFlow understands the DigImage colour schemes. These may
be added, as illustrated in figure 62, by simply
giving them a name and typing the full path specification of the colour scheme.
For DigImage, the colour schemes are stored in the %DigImage%\LUTs directory under the name
Output##.lut,
where ##
represents a two digit number, starting with 00 for the first DigImage colour
scheme.
Alternatively, specifying an image in the File edit box will
install the colour scheme stored in that image, or construct a colour scheme of
your own. The following example uses a short piece of dfc code to construct and install a
colour scheme that is white in the middle tending towards red for low values
and blue for high values. In this particular case, the scheme is tweaked so
that its equivalent greyscale intensity varies parabolically. (It is often
useful to have a colour scheme that works in both colour and monochrome.) The
parabolic nature will emphasise extreme values more than small values. Such a
scheme can be useful for displaying vorticity, for example.
# Initialise arrays to white
red := make_array(1,256);
green := red;
blue := red;
# Make basic colour scheme as two linear ramps
for k:=0 to 63 {
z := k/64;
p := 128 + k;
q := 127 - k;
red[p] := 1 - z; # Remove red
blue[q] := 1 - z; # Remove blue
};
for k:=64 to 127 {
z := (k-64)/64;
p := 128 + k;
q := 127 - k;
red[p] := 0; # No red
green[p] := 1 - z; # Remove green
blue[q] := 0; # No blue
green[q] := 1 - z; # Remove blue
};
# Make parabolic in grey value
grey := 0.299*red + 0.587*green + 0.114*blue; # Current grey
equivalent
p := x_index(256)/255;
limit := 0.8; # Limiting grey
value for ends
target := 1 - 4*limit*(p - 0.5)^2; # Target grey equivalent
scale := target/(grey max 1e-8); # The required scaling
red *= scale;
green *= scale;
blue *= scale;
# Install the colour scheme
add_colour_scheme("test",red,green,blue);
# Now test the colour scheme
im := x_index(512,64)/511;
hV := view(im);
view_colour(hV,"test");
5.3.7 Toggle
colour
Toolbutton: 
Shortcut: ctrl+B
Related commands: view_toggle_colour(..),
When an image is displayed using false colour, clicking this
button will temporarily switch to greyscale. Clicking a second time will return
the image to the original false colour scheme.
5.3.8 Toolbar
Turns on or off the toolbar at the top of the main DigiFlow
window. It is recommended that you leave this turned on.
5.3.9 Slaves
Slave windows are a special type of window that are tied to
a normal window – the master window – in such a way that when the master window
is updated, any changes are reflected in the slave window. For example, if the
master window is part of a sequence, then stepping through the sequence will
update not only the master window, but also its slave.
A given master window may have one or more slave windows.
When a master window is closed, its slaves are closed automatically (without
prompting). Closing a slave window does not alter the state of the master nor
force it to close.
For a more comprehensive array of slaves, refer to Tools: Slave Process
in §5.7.5.
5.3.9.1 3D View
Toolbutton: 
Shortcut:
Related commands: slave_view_3d(..)
This option takes a copy of the image in the current active
window and uses the values it contains to create a three-dimensional surface
plot in a new slave window. The special slave window has its own toolbar that
controls the three-dimensional rendering and allows re-orientation and other
visual changes. This window is illustrated in figure 63.
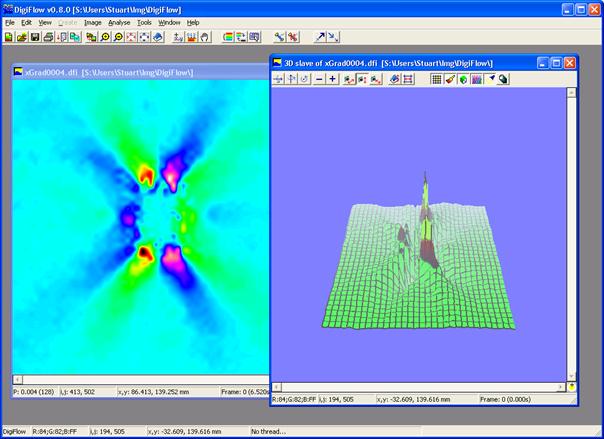
Figure 63: A
three-dimensional slave view.
The buttons on the toolbar are divided into five groups.
With the exception of the +
and buttons
(the second group), the first four groups of buttons act as a set of radio
buttons in which only one button may be pressed at a time. The pressed button
then selects the drawing attribute that is to be changed using the plus or
minus buttons. A brief summary of the buttons is given below.
|
Button
|
Description
|
|

|
Enable rotations about the x axis. Once enabled, then the  and and  buttons rotate the plot about
the x axis buttons rotate the plot about
the x axis
|
|

|
Enable rotations about the y axis. Once enabled, then the and buttons rotate the plot about
the x axis
|
|

|
Enable rotations about the y axis. Once enabled, then the and buttons rotate the plot about
the x axis
|
|

|
Decrements the number associated
with a render setting. The render setting is selected by clicking on the
corresponding radio button in the toolbar menu.
|
|

|
Increments the number associated
with a render setting. The render setting is selected by clicking on the
corresponding radio button in the toolbar menu.
|
|

|
Enable panning the
three-dimensional view left or right. Once enabled, then the and buttons pan the plot
left or right.
|
|

|
Enable panning the
three-dimensional view up or down. Once enabled, then the and buttons pan the plot up
and down.
|
|

|
Enable moving the camera closer
or further. Once enabled, then the and buttons move the view position in and out.
|
|

|
Enable changing the vertical
scale of the plotted data. Once enabled, then the and buttons decrease and increase
the scale.
|
|

|
Enable changing the spacing of
the grid lines plotted on the surface. Once enabled, then the and buttons change the
spacing..
|
|

|
Toggle the grid on and off.
|
|

|
Paint the surface
|
|

|
Toggle hidden line removal
|
|

|
Toggle depth fog on and off.
|
|

|
Activate spotlight.
|
|

|
Change the colour of the
background.
|
|

|
Toggle display of axes.
|
|

|
Reset settings.
|
Note that the view produced is displayed as a bitmap. This
may be saved, printed and/or converted to an Encapsulated PostScript plot.
5.3.10 Threads
Toolbutton: 
Shortcut:
Related commands: as_thread(..),
is_running(..),
wait_for_end(..),
pause_thread(..), unpause_thread(..), kill_thread(..), get_thread_prioritiy(..), set_thread_priority(..), process,
process_as_thread
Starts the dialog box showing and controlling the various
active processing threads.

Figure 64: The thread
control dialog box.
Each thread is given a name composed of a brief description
of the process responsible for the thread and an identification number. The
latter is used to provide a unique identification of a particular thread.
To make any changes to a thread, first select it from the
list. The current status and execution priority of the thread will then be
displayed. The thread may be paused or resumed by clicking the corresponding
buttons. Alternatively, clicking Stop will close the thread, terminating the associated
process in a relatively graceful manner. Once a process thread has been
stopped, it may only be restarted by starting the process again from the
beginning. In contrast, a thread that has been paused may always be resumed.
Any threads still running when DigiFlow is exited will be
stopped and cannot be restarted.
Note that Normal
priority is one step lower than the default priority for most Windows
applications, thus preventing a DigiFlow process from unacceptably impacting
the overall performance of Windows.
5.3.11
Pause all threads
Toolbutton: 
Shortcut:
Related commands:
This tool causes all threads currently running in DigiFlow
to be paused until the OK button is pressed. Note that pausing these threads
does not prevent you from opening images, changing colour schemes, or even
starting new processes: it is only threads that were running at the time the
tool was activated that are paused.
Figure 65:
Message box indicating all processing within DigiFlow has been paused.
Note: it is advisable not to use this tool while using the File: Live Video
features.
5.3.12 Refresh
Toolbutton: 
Shortcut:
Related commands:
Causes the currently selected view to be refreshed from the
corresponding file, if one exists. This is necessary if you wish to see any
changes that have been made to the file since it was originally displayed. This
is particularly valuable when editing .dfd files or viewing images made by external programs,
for example.
5.3.13 In Parallel
Toolbutton: 
Shortcut:
Related commands: in_parallel(..)
From DigiFlow version 2.0 (excluding the free version),
DigiFlow is able to execute some facilities in parallel when it detects
multiple processors, allowing a significant speed-up of these facilities. Note,
however, that due to overheads in the parallelisation, plus limited memory and
disk bandwidth, the speed-up is less than the increased cpu usage. In general,
when doing standard processing, better performance can be achieved by running
two jobs at the same time on DigiFlow without the In Parallel facility invoked, than will
be achieved by running the two jobs in succession using the In Parallel facility.
Note that the current cpu usage is shown in the main
DigiFlow status bar at the bottom of DigiFlow. With multiple processors,
invoking In Parallel
should increase the cpu usage beyond 100%. In version 2.0 the parallelisation
is coded explicitly in only a small number of facilities, although it is
expected that in future versions parallel execution will be much more widely
available within DigiFlow.
5.4 Create
This menu is currently disabled.
5.5 Sequence
This menu is only available when the active window contains
a movie, sequence or collection of images. The menu largely replicates the
functionality available from the toolbar along the top of these windows.

Figure 66: The movie tool
bar.
|
Button
|
Section
|
Description
|
|

|
§5.5.1.12
|
Play backwards in
a loop
|
|

|
§5.5.1.6
|
Play backwards
quickly (Review)
|
|

|
§5.5.1.2
|
Play backwards
|
|

|
§5.5.1.3
|
Stop playing
sequence
|
|

|
§5.5.1.4
|
Pause current
movie animation
|
|

|
§5.5.1.1
|
Play forwards
|
|

|
§5.5.1.5
|
Play forwards
quickly (Cue)
|
|

|
§5.5.1.11
|
Play forwards in
a loop
|
|

|
§5.5.1.9
|
Jump to the start
|
|

|
§5.5.1.8
|
Move back one
frame
|
|

|
§5.5.1.7
|
Move forwards one
frame
|
|

|
§5.5.1.10
|
Jump to the end
|
|

|
§
|
Speed up the
playback
|
|

|
§
|
Slow down the
playback
|
|

|
§5.5.1.13
|
Synchronise with
another view
|
|

|
§5.5.1.14
|
Control dialog
for additional control over
|
|

|
§5.5.1.15
|
Joggle between
two frames
|
|

|
§5.5.1.16
|
Joggle across
multiple frames
|
|

|
§5.5.1.17
|
Set first frame
for loop
|
|

|
§5.5.1.18
|
Frame track bar
showing location in sequence
|
|

|
§5.5.1.19
|
Set last frame
for loop
|
5.5.1 Animate
5.5.1.1 Play
Toolbutton: 
Shortcut: alt+up; Click
middle mouse button
Related commands: animate_view(..,"play")
Plays the image selector (§3.4) from
the current location onwards.
Clicking the middle mouse button will play the movie (unless
it is already playing, forwards or backwards, in which case it will pause it).
Holding the middle button down while dragging the mouse to the right (left)
will move rapidly forwards (backwards) through the movie.
5.5.1.2 Play Backwards
Toolbutton: 
Shortcut: alt+down; Double
click middle mouse button
Related commands: animate_view(..,"playbackward")
Plays backwards the image selector (§3.4)
from the current location.
Double clicking the middle mouse button will play the movie
backwards. Holding the middle button down while dragging the mouse to the right
(left) will move rapidly forwards (backwards) through the movie.
5.5.1.2.1
5.5.1.3 Stop
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"stop")
Stops the playing of the image selector (§3.4) from the current location. The sequence is left with
the final frame played visible, but internally the movie, sequence or collection
is returned to its starting point. Playing the movie forwards again will start
from the beginning, or backwards will start from the end.
5.5.1.4 Pause
Toolbutton: 
Shortcut: alt+space; Click
middle mouse button
Related commands: animate_view(..,"pause")
Pauses the playing of the image selector (§3.4) from the current location. The sequence is left with
the final frame played visible, and play operations will restart from this
point.
Clicking the middle mouse button will pause the movie if it
is already playing (either forwards or backwards. If the movie is not already
playing, then clicking the middle mouse button will play it.
5.5.1.5 Cue
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"cue")
Plays the image selector (§3.4)
at ten times the normal speed (showing only every tenth frame).
5.5.1.6 Review
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"review")
Plays the image selector (§3.4)
backwards at ten times the normal speed (showing only every tenth frame).
5.5.1.7 Step Forwards
Toolbutton: 
Shortcut: alt+right; Mouse
wheel, middle mouse button
Related commands: animate_view(..,"step")
Step forwards one frame in the image selector (§3.4), starting from the current location.
Rotating the mouse wheel will step the movie forwards or
backwards, depending on the direction of rotation. Holding the middle button
down while dragging the mouse to the right (left) will move rapidly forwards
(backwards) through the movie.
If the ctrl
key is held down at the same time as using the above mouse controls, then the
command is applied to all open windows.
5.5.1.8 Step Backwards
Toolbutton: 
Shortcut: alt+left; Mouse
wheel, middle mouse button
Related commands: animate_view(..,"stepbackward")
Step backwards one frame in the image selector (§3.4), starting from the current location.
Rotating the mouse wheel will step the movie forwards or
backwards, depending on the direction of rotation. Holding the middle button
down while dragging the mouse to the right (left) will move rapidly forwards
(backwards) through the movie.
If the ctrl
key is held down at the same time as using the above mouse controls, then the
command is applied to all open windows.
5.5.1.9 Start of Movie
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"start")
Move to the start of the image selector.
5.5.1.10 End of Movie
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"end")
Move to the end of the image selector.
5.5.1.11 Loop
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"loop")
Plays the image selector (§3.4)
forwards in a continuous loop.
5.5.1.12 Loop backward
Toolbutton:
Shortcut:
Related commands: animate_view(..,"loopbackward")
Plays the image selector (§3.4)
backwards in a continuous loop.
5.5.1.13 Synchronise
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"sync")
Causes this image selector (§3.4)
to be slaved to another selector. The other selector will provide the time
information for synchronous advancement of this selector.
5.5.1.14 Control dialog
Toolbutton: 
Shortcut:
Related commands:
This option fires up a dialog providing more detailed
control over the animation of the image selector.
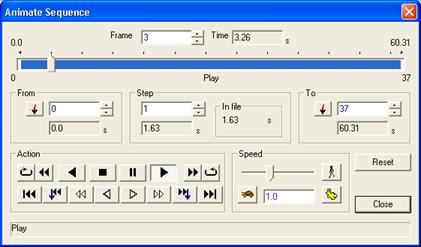
Figure 67:
The dialog box that provides detailed control of image animation.
The buttons and controls in this dialog box are similar to
those found for the selector timing tab in the Sift dialog in §4.3.1. In addition, the dialog provides more detailed
control over the animation speed.
Note: This dialog is modal for free versions of the DigiFlow
licence, but modeless (allowing switching between other elements of DigiFlow)
for full licences.
5.5.1.15 Joggle between two
frames
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"joggle2")
This causes the sequence to flip back and forwards between
two consecuitive images. This can be useful for looking at the relative
movement or relationship between the images.
5.5.1.16 Joggle across
multiple frames
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"joggle6")
This causes the sequence to repeatedly play multiple (six)
images and then jump back to the first. This can be useful for looking at the
relative movement or relationship between the images.
5.5.1.17 Set first frame for loop
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"setfrom")
animate_view(..,"resetfromto")
Sets the first image (the From image in the control dialog in §5.5.1.14)
to be the current frame. Any subsequent playing of the sequence will start at
this image. Note the range over which the sequence is played can also be set by
selecting a range by holding down the shift button while using the frame
trackbar (see §5.5.1.18).
5.5.1.18 Frame track bar
Toolbutton: 
Shortcut:
Related commands:
The trackbar shows the current position of the image within
the sequence. Grabbing the track bar with the mouse allows rapid movement
through the sequence. A range of images may be selected by using the shift key in
conjunction with the mouse. Any subsequent play or loop operation will be
restricted to the selected range, although the track bar can still be used to
access images outside that range. Clicking the bar while holding down the ctrl key will reset
the range to the entire sequence.
The range of the track bar may also be set using the buttons
detailed in §§5.5.1.17 and 5.5.1.19.
5.5.1.19 Set last frame for loop
Toolbutton: 
Shortcut:
Related commands: animate_view(..,"setto")
animate_view(..,"resetfromto")
Sets the last image (the To image in the control dialog in §5.5.1.14)
to be the current frame. Any subsequent playing of the sequence will start at
this image. Note the range over which the sequence is played can also be set by
selecting a range by holding down the shift button while using the frame
trackbar (see §5.5.1.18).
5.6 Analyse
5.6.1 Time
information
5.6.1.1 Time average
Toolbutton:
Shortcut:
Related commands: process Analyse_TimeAverage(..)
Calculates a variety of averages and other statistics for an
image selector.

Figure 68: Compute
the average of an image selector.
The Input group
contains the controls used to determine the image selector to be sampled. This
selector may be specified from a file by clicking the File button, in which case the standard
Open Image dialog box is produced. Finer control over which parts of the input
stream are to be processed are determined via the Sift button; see §4.3.
Alternatively, the output of a different process may be utilised by clicking
the Process
button (refer to §7 on chaining processes for
further details).
Note that this tool can process not only images from any
DigiFlow supported format, but also velocity fields and other complex data
stored in .dfi
files. The output stream preserves the data format of the input stream. For
example, if the input stream is a velocity field, then the output stream will
also contain velocity information.
The time average image is saved to the file specified in the
Outputs group
by clicking the Save As
button. If this process is acting as the source for another process, the Save As button is
suppressed (refer to §7 for further details). The
colour scheme and compression options to be used for the output stream is set
by clicking the Options
button (§4.4).
The Method
radio buttons select the averaging procedure adopted. Arithmetic returns the standard arithmetic
mean, while RMS
calculates the root mean square image. The image fluctuations are represented
by the Std. Dev.
option, while Geometric
and Harmonic
provide the other forms of averaging. These are summarised in the table below.
|
Method
|
Formula
|
Comments
|
|
Arithmetic
|

|
This is the standard mean value.
|
|
RMS
|

|
The root mean square value.
|
|
Std. Dev.
|
|
Standard deviation of the image series.
|
|
Geometric
|

|
Geometric mean.
|
|
Harmonic
|

|
Harmonic mean.
|
|
Min
|

|
Minimum value.
|
|
Max
|

|
Maximum value.
|
5.6.1.2 Weighted time average
The weighted time average facility provides an extension to
that provided by the more simple averaging. In particular, the following table
defines the weighted means. Here, Pi is the intensity at a given pixel from the image
at time i, and Ai is the weighting applied to that pixel/image.
|
Method
|
Formula
|
Comments
|
|
Arithmetic
|

|
This is the standard mean value.
|
|
RMS
|

|
The root mean square value.
|
|
Std. Dev.
|
|
Standard deviation of the image series.
|
|
Geometric
|

|
Geometric mean.
|
|
Harmonic
|
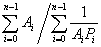
|
Harmonic mean.
|
|
Min
|
, only for Ai ¹ 0
|
Minimum value.
|
|
Max
|
, only for Ai ¹ 0
|
Maximum value.
|
The user interface for the weighted mean is similar to that
for the simple mean facility (see §5.6.1.1), but
has an additional (optional) Weighting
selector for specifying a second input stream to provide information with which
to construct the weighting Ai. The weighting itself is constructed by the code
specified in Expression.
This code should return an array of the same dimensions as the input Sequence, or a
two-dimensional array of the same size in those two dimensions. This array can
be constructed from the input Sequence
and (when specified) the input Weighting.
If Weighting is
specified, then this image is available to the code through the array variable A and the
compound variable B.
If Weighting is
not specified, then A
and B
point to the input Sequence.
In both cases the input Sequence
is also available through the array variable P and compound variable Q.
For simple images, the array variables A and P will have two
dimensions, whereas for more complex images A and P will have more than two dimensions.
The information in these multidimensional arrays will also be available through
individual components of the compound variables B and Q. For example, if the first input Sequence contains a
velocity field generated by the PIV facility (see §5.6.5.2)
then Q.u
and Q.v
will contain the two components of the velocity field, and (depending on the
options selected during the processing) Q.Scalar may contain the vorticity
field. Full colour images are supplied as their red, green and blue components
with a three-dimensional P
array: P[:,:,0] contains the red
component, P[:,:,1] contains the
green component, and P[:,:,2] contains the
blue component. For convenience, these are also supplied as Q.Red, Q.Green and Q.Blue. The button may be
used to search for or provide information on specific DigiFlow functions. The button may be
used to search for or provide information on specific DigiFlow functions.
One common use of the weighted average facility is for
computing the temporal average of velocity fields where there may be an
incomplete spatial coverage for the velocity at any particular time. In such
cases, only points with valid velocity vectors should contribute to the
temporal mean. This may be achieved by specifying the sequence of velocity
fields to the input Sequence
and simply specifying A<>0;
as the Expression
as the PIV subsystem sets the velocity to exactly zero when it is unable to
determine a velocity. More sophisticated averaging can be achieved by using the
Quality output
from the PIV subsystem to construct a more continuous measure of quality to be
used as the weighting.
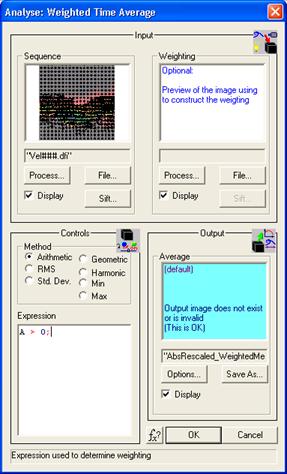
Figure 69:
Dialog controlling the weighted time average.
5.6.1.3 Harmonic analysis
Toolbutton:
Shortcut:
Related commands: process Analyse_HarmonicAnalysis(..)
One valuable method of analysing periodic signals, such as
waves, is by harmonic analysis to determine the phase and amplitude of the
component of the signal at a given frequency or set of frequencies.
DigiFlow provides a convenient method of analysing a
sequence for a given frequency and harmonics (integer multiples) of that
frequency. The Input
sequence should span one or preferably more periods of the frequency you wish
to analyse. The Sift
button should be used to ensure the period being analysed represents a time of
steady oscillation. In general, the more images available within this period
the better the results.
The Fundamental
frequency to be analysed can be specified in a number of ways,
with the Period
stated in either time or frames, or the Frequency in Hertz (cycles per second)
or radians per second. For best results, the input sequence should correspond
to an exact multiple of the fundamental period. If the Conform input to period box is checked,
then DigiFlow will automatically truncate the input sequence so that it is as
close as possible to a multiple of the period.
In addition to analysing the fundamental frequency, DigiFlow
can simultaneously analyse harmonics of this frequency, plus the mean (zero
frequency) component. Unlike many other DigiFlow facilities, the Harmonic
Analysis tool will generate the names of the harmonic files automatically from
the files specified in Output
for the fundamental. If the name for the fundamental file is amp.dfi, then the ´2 harmonic is saved in amp[x2].dfi. Similarly for other
harmonics. (Note that even if the Number as #### or Compact list boxes are checked in the Open Image dialog
then DigiFlow will not treat the number within the square brackets as part of a
sequence number.)
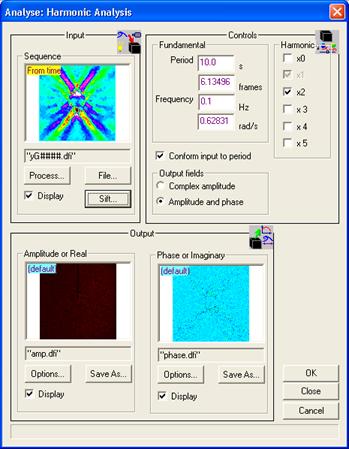
Figure 70:
Dialog controlling harmonic analysis within DigiFlow.
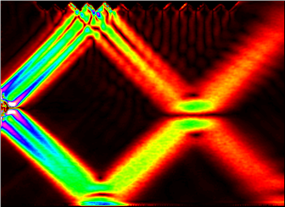
(a) (b)
Figure 71:
Example of harmonic analysis, showing (a) amplitude and (b) phase of the
fundamental frequency of an internal gravity wave.
Once the harmonic analysis has been completed, it is a
simple matter to reconstruct the flow field at an instant in time. Alternatively,
the field may be decomposed into the different wave components using a Hilbert
Transform. A tool for achieving this is found under the Spectral recipes in
Tools Transform Recipes. Figure ?? illustrates the results.
Figure 72:
Hilbert Transform yielding waves with kx > 0 and ky > 0. (a) Amplitude. (b) Phase.
5.6.1.4 Time series
Toolbutton:
Shortcut:
Related commands: process Analyse_TimeSeries(..)
Extracts a time series of the intensity along some line or
curve and forms an image with one spatial and one temporal dimension.
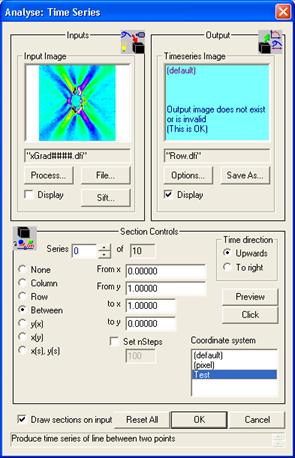
Figure 73: Dialog
box controlling the extraction of time series information from an image
sequence.
This facility takes a single input stream, and creates one
or more output streams. The input streams are normally sequences, while the
output streams are normally individual images.
The Input group
contains the controls used to determine the image selector to be sampled. This
selector may be specified from a file by clicking the File button, in which case the standard
Open Image dialog box is produced. Finer control over which parts of the input
stream are to be processed are determined via the Sift button; see §4.3
for further details. Alternatively, the output of a different process may be
utilised by clicking the Process
button (refer to §5.7.5 for further details).
Note that this tool can process not only images from any
DigiFlow supported format, but also velocity fields and other complex data
stored in .dfi
files. The output stream preserves the data format of the input stream. For
example, if the input stream is a velocity field, then the output stream will
also contain velocity information.
A number of time series may be generated simultaneous in
this manner, each representing a different section through time image, and each
written to a different Timeseries
Image. You may move between each of the possible time series
using the Series
edit control and associated spin control. Individual extraction codes are
enabled or disabled via the Use
check box, while the Reset
All button may be used to turn off all and reset all extraction
time series.
For each time series, the section through the image may be
specified in a variety of ways. The Column and Row radio buttons allow data to be extracted from a given
column or row within the image. In both cases, this data is written to the
output image as a row of pixels, with each successive time being placed above
the previous one.
The Between
radio button allows two points to be specified, and the data extracted from the
line joining the two points using a specified number of steps. The points may
be specified in either pixel or world coordinates by selecting the appropriate Coordinate sytem.
Alternatively, expressions may be given to determine the
line or curve along which data is to be sampled. These curves may be specified
either as y(x),
x(y), or
parametrically as x(s)
and y(s).
Depending on which of these is selected, the formula supplied by the user
should be cast in terms of x,
y or s. The formula may
also include time Time.tNow
and/or the frame number Time.fNow
(the limits on the selector times and frames are also available through Time.tFrom, Time.tTo, Time.tStep, Time.fFrom, Time.fTo and Time.fStep). In
addition, the variable Time.iNow
provides an iteration counter. This will always start at zero and increase by
one for each image processed (in contrast, the first value for Time.fNow depends on
where in the input sequence the sequence to be processed starts, and its
increment depends on the stepping between the images to be processed). In all
cases, the user can specify the number of sample points and the coordinate
system to be used.
The direction of the time axis on the resulting images may
be specified using the Time
direction group.
Each Timeseries
Image created has the samples taken across its width (from first
to last left to right), and time increasing from bottom to top. The file that
receives this image is specified in the Outputs group by clicking the Save As button. Note
that a different destination is provided for each time series activated. If this
process is acting as the source for another process, the Save As button is suppressed (refer to §7 for further details). The colour scheme and compression
options to be used for the output stream is set by clicking the Options button (§4.4).
In addition to the standard image formats for the output of
each time series, this facility supports simple ASCII data files with a .dat extension that
provides a more convenient format, including precise details of the pixel or
world coordinates from where the data came.
Note that subpixel precision is obtained for all the samples
by using bilinear interpolation, where appropriate.
5.6.1.5 Time extract
Toolbutton:
Shortcut:
Related commands: process Analyse_TimeExtract(..)
Using a user-specified formula, extract a one-dimensional
array of data from each image in a sequence, and use this to construct an image
with one spatial and one temporal dimension.
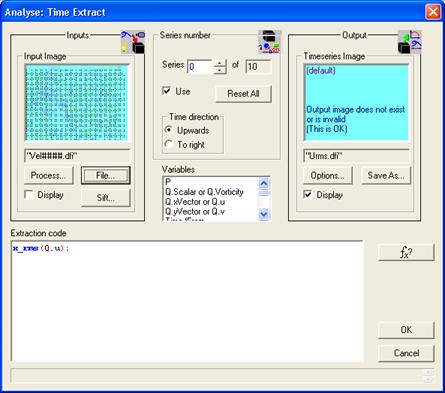
Figure 74: Dialog
controlling the extraction of calculated data from an image to form a time
series of this data.
This facility takes a single input stream, specified
through, and creates one or more output streams. The input streams are normally
sequences, while the output streams are normally individual images.
The Input group
contains the controls used to determine the image sequence to be sampled. This
selector may be specified from a file by clicking the File button, in which case the standard
Open Image dialog box is produced. Finer control over which parts of the input
stream are to be processed are determined via the Sift button; see §4.3
for further details. Alternatively, the output of a different process may be
utilised by clicking the Process
button (refer to §7 for further details).
Note that this tool can process not only images from any
DigiFlow supported format, but also velocity fields and other complex data
stored in .dfi
files. The output stream preserves the data format of the input stream. For
example, if the input stream is a velocity field, then the output stream will
also contain velocity information.
The Extraction
code should take the current image and return a one-dimensional
array of data to be added to the time series, and the Variables box lists some of the
variables describing the image that are available for use in the code; a more
comprehensive list may be viewed by clicking the Variables button.. A number of time
series may be generated simultaneous in this manner, each with a different Extraction code, and
each written to a different Timeseries
image. You may move between each of the possible time series
using the eSeries
edit control and associated spin control. Individual extraction codes are
enabled or disabled via the Use
check box, while the Reset
All button may be used to turn off all and reset all extraction
time series.
Each Timeseries
Image created as one axis as time and the other as the ordinal
position of the one-dimensional array returned by the Extraction code. The direction of the
time axis is specified by the Time
direction group. The file that receives this image is specified
in the Outputs
group by clicking the Save As
button. Note that a different destination is provided for each time series
activated. If this process is acting as the source for another process, the Save As button is
suppressed (refer to §7 for further details). The
colour scheme and other output options to be used for the output stream is set
by clicking the Options
button (§4.4).
The basic image from the input stream is supplied to the Extraction code in
the array variable P.
For simple images this will be a two-dimensional array. However, for more
complex image formats (such as velocity fields stored in .dfi files), P will contain more than two dimensions.
In such cases DigiFlow will also provide the same data split into its
individual component two-dimensional arrays in the compound variable Q. For example,
if the input stream contains a velocity field generated by the PIV facility
(see §5.6.5.2) then Q.u and Q.v will contain the two components of
the velocity field, and (depending on the options selected during the
processing) Q.Scalar
may contain the vorticity field. If the input stream contains a DigiFlow
drawing (typically one or more .dfd
files), then DigiFlow provides the drawing is available through its handle hD, in addition
to a bitmap version of it in the array variable P. Additional drawing commands may be
added to the drawing handle, or it may be incorporated into a compound drawing
using draw_embed_drawing(..).
Full colour images are supplied as their red, green and blue
components with a three-dimensional P array: P[:,:,0] contains the red component, P[:,:,1] contains the
green component, and P[:,:,2] contains the
blue component. For convenience, these are also supplied as Q.Red, Q.Green and Q.Blue.
DigiFlow also provides time information about the input
stream through the Time
compound variable. Typically this contains Time.fNow and Time.tNow giving the current frame number
and time (in seconds) relative to the start of the entire input stream. An
additional variable Time.iNow
gives an iteration counter that is the frame number relative to the start of
those that are actually being processed. Details of the entire input stream are
provided through Time.fFirst,
Time.fLast
and Time.tFirst,
Time.tLast
that provide details of the first and last frame/time that exist in the input
stream. Moreover, Time.fFrom,
Time.fTo
and Time.tFrom,
Time.tTo
provide information about which part of the stream is being processed.
Although the main variables available are listed in the Variables list box
this list does not include any additional modifiers for the individual data
plane variables beginning with Q. These modifiers include the description, scaling and
(where appropriate) spacing of the data. A more comprehensive list may be
viewed by clicking the Variables
button. For further details, refer to the PIV data example in §5.7.2.
The Extraction
code may be as simple as returning a subarray (e.g. P[100,10:50]), or it may be the result of a complex calculation on the image. The button may be
used to search for or provide information on specific DigiFlow functions.
Examples of more complex processing are given below.
Depth of gravity current
For example, suppose you have an experiment of a gravity
current propagating along a channel and want to produce a time history of the
depth of the current. The first question is how to measure the depth. There are
a number of possibilities.
The simplest measure of the depth would be the height from
the bottom to the point where the density fell below some threshold. Suppose we
have previously processed a sequence using the dye attenuation facility
described in §5.6.3.1 and have an image stream that
represents the concentration/density of the current. This could be defined as
the number of pixels that exceed some threshold in intensity. In this case the Extraction code would
be y_count(P > 0.1)/y_size(P), where the
threshold is 0.1. Dividing by y_size(P)
means that the resulting depth will be normalised by the height of the
input stream.
A more robust measure would be to use the integral of the
concentration over the depth. This is achieved simply by looking at the
vertical mean as a function of position by y_mean(P). This gives a measure of the
hydrostatic pressure excess at the base of the current.
Concentration power spectrum
As a more complex example, suppose we have a series of LIF
images from turbulent flow (these may have been processed using the LIF
facilities described in §5.6.3.2), and you would
like to know how the power spectrum of some region evolves in time. The region
might vary for each image. In particular here we are looking at Rayleigh-Taylor
instability and are interested only in the region where the two layers are
mixing. In this case the camera was turned on its side. We could rotate the
image (e.g. using rotate_image_clockwise(..) or transpose(..)), but for
this example we will work in the rotated space with x
vertical and y horizontal. A suitable code segment is
given below:
thresh := 0.05;
Fluct2 := y_rms(P)^2 - y_mean(P)^2;
iStart := -1;
for i:=0 to x_size(P)-1 {
if (iStart
= -1 and Fluct2[i] >
thresh) {
iStart := i;
};
};
iEnd := -1;
for i:=x_size(P)-1 to 0 step -1 {
if (iEnd
= -1 and Fluct2[i] >
thresh) {
iEnd := i;
};
};
Spect := power_spectrum_column(P[iStart:iEnd,:]);
x_mean(Spect);
To determine the region over which we will compute the
concentration power spectrum we probe the magnitude of the concentration power
spectrum, calculated from the root mean square and mean intensities
(concentrations) in the y direction, looking for the
first and last columns that satisfy a threshold condition. (Note we could use
the function x_transition_index(..) in place of
the loops for improved computational efficiency.)
5.6.1.6 Time summarise
Toolbutton:
Shortcut:
Related commands: process Analyse_TimeSummarise(..)
The Time
summarise facility is similar to the Time extract facility, except that it is
tailored towards extracting and graphing scalar quantities from an image
sequence.
Figure 75 shows the dialog
controlling this facility. The Input
group contains the controls used to determine the image sequence
to be sampled. This selector may be specified from a file by clicking the File button, in which
case the standard Open Image dialog box is produced. Finer control over which
parts of the input stream are to be processed are determined via the Sift button; see §4.3 for further details. Alternatively, the output of a
different process may be utilised by clicking the Process button (refer to §7 for further details).
The Extraction
code should take the current image (provided in P for simple images)
and return a scalar value to be added to the time series. This code may be as
simple as returning the intensity at a specific point (e.g. P[100,10]), or it may be
the result of a complex calculation on the image (see below for further
details).
The result of the Extraction code is rendered on a graph against time. The
method of representing the individual data points is determined by Draw with to specify
line or mark type, and Colour
to set the colour to be used. Multiple data sets may be plotted on the same
graph by specifying different Extraction
code, Draw with
and Colour for
each Series
that is selected by Use.
The extracted data are all rendered on the same graph,
specified by Output graph
in the normal way. In this case, Output graph would normally be a vector format image (.dfd, .emf or .wmf file), but this
may be saved as a raster image, if preferred. The x
axis represents time, while the y axis is used for the
extracted data. The limits on the y axis are set by yMin and yMax. The titles for
the two axes are given by x
Title and y
Title. With fully licensed copies of DigiFlow these may contain
LaTeX-like text formatting commands. For example, the string Dimensionless height
$\big(\frac{h}/{\alpha^2H_0}\big)$ would produce the label
.
See §3.9 for further
details.
A number of time series may be generated simultaneous in
this manner, each with a different Extraction code, and each written to a different Timeseries image. You
may move between each of the possible time series using the Series edit control and associated spin
control. Individual extraction codes are enabled or disabled via the Use check box, while
the Reset All
button may be used to turn off all and reset all extraction time series.
The basic image from the input stream is supplied to the Extraction code in
the array variable P.
For simple images this will be a two-dimensional array. However, for more
complex image formats (such as velocity fields stored in .dfi files), P will contain more than two dimensions.
In such cases DigiFlow will also provide the same data split into its
individual component two-dimensional arrays in the compound variable Q. For example,
if the input stream contains a velocity field generated by the PIV facility
(see §5.6.5.2) then Q.u and Q.v will contain the two components of
the velocity field, and (depending on the options selected during the
processing) Q.Scalar
may contain the vorticity field. Full colour images are supplied as their red,
green and blue components with a three-dimensional P array: P[:,:,0] contains the red component, P[:,:,1] contains the
green component, and P[:,:,2] contains the
blue component. For convenience, these are also supplied as Q.Red, Q.Green and Q.Blue. The button may be
used to search for or provide information on specific DigiFlow functions.
DigiFlow also provides time information about the input
stream through the Time
compound variable. Typically this contains Time.fNow and Time.tNow giving the current frame
number and time (in seconds) relative to the start of the entire input stream.
An additional variable Time.iNow
gives an iteration counter that is the frame number relative to the start of
those that are actually being processed. Details of the entire input stream are
provided through Time.fFirst,
Time.fLast
and Time.tFirst,
Time.tLast
that provide details of the first and last frame/time that exist in the input
stream. Moreover, Time.fFrom,
Time.fTo
and Time.tFrom,
Time.tTo
provide information about which part of the stream is being processed.
The main variables available are listed in the Variables list box.
This list does not, however, include any additional modifiers for the
individual data plane variables beginning with Q. These modifiers include the
description, scaling and (where appropriate) spacing of the data. A more
comprehensive list may be viewed by clicking the Variables button. For further details,
refer to the PIV data example in §5.7.2.
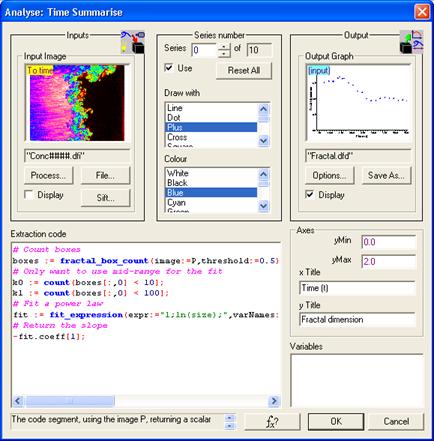
Figure 75: The Analyse:
Time Summarise dialog.
Evolution of fractal dimension
In the example shown in figure 75
(the code is repeated below for clarity) we want determine the evolution of the
fractal dimension of a contour from a series of LIF images. Here we can make
use of DigiFlow’s in-built box counting algorithm in conjunction with its
ability to fit least squares curves.
boxes := fractal_box_count(image:=P,threshold:=0.5);
k0 := count(boxes[:,0] < 10];
k1 := count(boxes[:,0] < 100];
fit := fit_expression(expr:="1;ln(size);",
varNames:="size;",values:=boxes[k0:k1,0],rhs:=boxes[k0:k1,1],rhsExpr:="ln(n);",rhsNames:="n;");
-fit.coeff[1];
The net result (just visible in the preview of the output
image) is a time series showing the evolution of the fractal dimension. In
reality, it is advisable to plot the individual box count verses box size
curves for individual images before embarking on processing such as that
described above in order to ensure a power law relationship exists in the range
of box sizes selected (here between 10 and 100 pixels).
Evolution of mean intensity along line
Suppose we want to know the mean intensity along some line
within an image. Obviously, if the line is simply a line or column then we need
simply specify mean(P[10,:]), for example,
for the mean intensity of column 10. However, if the user wishes to specify the
line interactively, we might use
if (Time.iNow = 0) {
hView := get_active_view();
line := get_mouse_line(hView);
dx := line.x1 - line.x0;
dy := line.y1 - line.y0;
if (abs(dx) > abs(dy)) {
x := make_array(0,abs(dx));
y := line.y0 +
x*dy/dx;
x :=
line.x0 + dx/abs(dx)*x_index(x);
} elseif
(abs(dy) > 0) {
y := make_array(0,abs(dy));
x := line.x0 +
y*dx/dy;
y :=
line.y0 + dy/abs(dy)*x_index(y);
} else
{
x := make_array(line.x0,1);
y := make_array(line.y0,1);
};
};
points := sample_values(P,x,y);
mean(points);
In this case, we use Time.iNow to detect the first time
through and set up the x
and y
arrays to contain the points on the line specified by the user drawing it on
the input image stream. Here we rely on the input view being active at the time
the code segment starts, allowing its handle to be determined by get_active_view(..).
5.6.2
Ensembles
5.6.2.1 Ensemble mean
Toolbutton:
Shortcut:
Related commands: process
Analyse_EnsembleMean(..)
It is frequently desirable to determine the behaviour of
flows across an ensemble of experiments. The Ensemble Mean facility provides one of
the basic building blocks for analysing an ensemble of experiments.
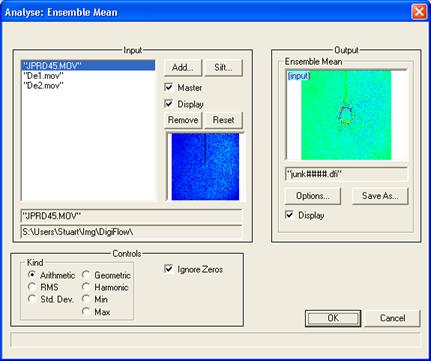
Figure 76: Dialog
controlling the calculation of ensemble means.
The interface for specifying an ensemble of experiments
differs slightly from the normal mechanism of specifying input streams in
DigiFlow in order to provide a more compact and convenient specification
process, although this is at the cost of some of the functionality of the
standard interface. The Input
group provides the various controls needed to specify the members of the
ensemble. Add
will fire up the standard Open
Image dialog for specifying an input stream. Once specified, the
name of the input stream is added to the list on the left of the group. An
input stream may be sifted by selecting it from the list then clicking the Sift button (see §4.3). While a given member of the ensemble is selected,
its name and directory are displayed at the bottom of the Input group, with a preview just above.
The Master
checkbox indicates if the selected stream is the master (controls the timing,
region, etc.). This checkbox may be used to specify the currently
selected stream as the master, but not to deselect it (to deselect a stream you
must select another stream as the master). Streams may be removed from the
ensemble by selecting from the list then clicking the Remove button. Alternatively, all
members of the ensemble may be removed using the Reset button.
The ensemble mean image is saved to the file specified in
the Outputs
group by clicking the Save As
button. If this process is acting as the source for another process, the Save As button is
suppressed (refer to §6 for further
details). The colour scheme and compression options to be used for the output
stream is set by clicking the Options
button (§4.4).
The Controls
group allows specification of the type of average to be computed, and whether
or not to include zero values in the average. Seven types of average are
provided through the Kind
group. The meaning of each of these is identical to that given for the time
averaging in §5.6.1.1. If the Ignore zeros box is checked, then only
those points which are not identically zero are included in the averaging.
DigiFlow’s synthetic schlieren and PIV facilities both flag missing data with
identical zeros, thus checking Ignore
zeros provides a convenient way of calculating a mean that is not
contaminated by missing data.
5.6.3 Dye images
5.6.3.1 Dye attenuation
Toolbutton:
Shortcut:
Related commands: process
Analyse_DyeAttenuation(..)
Correct a back-illuminated image for variations in the
intensity of the back-illumination. Pre- and post-correction manipulations
allow for easy implementation of camera calibration and dye calibration
procedures.
Principle of operation
Let us consider polychromatic light from a source with an
intensity i0(x,y,k) = I0(x,y) J(k),
where x,y are the location on the source and k
the wavenumber of the light emitted. For simplicity, we assume the source
colour is independent of the position within the source. Here, I0(x,y) represents the spatial
variation in the intensity of the illumination, while J(k)
gives the spectral colour. Assuming the spectral response of a linear
monochrome camera (with no black offset) is described by S(k),
then the intensity perceived by the camera viewing this source directly is
 .
.
For a colour camera, there will (typically) be three
such expressions, one each for the red, green and blue components (with
corresponding SR(k),
SG(k)
and SB(k)
leading to P0R, P0G and P0B). For
simplicity, we shall concentrate on a camera yielding a single (monochrome)
component. Moreover, we shall assume that the only light received by the camera
is that from the source I0 and that the source is ‘in focus’.
Suppose we conduct an experiment using coloured
(non-fluorescing) dye of concentration c(x,y,z,t)
such that the attenuation of light from the source passing in the z direction through the dye is governed by
 ,
,
where a = a(k)
describes the colour of the dye. The intensity falling on the camera is
therefore
 ,
,
where  is the
mean concentration along the light ray connecting the source and camera, and L(x,y,t) is the thickness of the
region in which we are interested in associating with the mean
is the
mean concentration along the light ray connecting the source and camera, and L(x,y,t) is the thickness of the
region in which we are interested in associating with the mean  . Here we have assumed that the light
rays are parallel (or nearly parallel) with the z
axis.
. Here we have assumed that the light
rays are parallel (or nearly parallel) with the z
axis.
The intensity perceived by the camera is therefore
 (1)
(1)
We proceed by considering three classes of dyes,
catagorised by a(k) in conjunction with the J(k)S(k) combination.
Ideal dyes
If the dye is neutral density (a(k) = a0 = const) then (1) reduces to
 .
.
Here we have defined Q as the
normalised intensity P/P0. Similarly, if the
light is monochromatic of wavenumber k1 at which a(k1) = a1, or the camera’s
response is monochromatic of wavenumber k1, then
 .
.
We shall call these two situations as the ‘ideal’ case.
The first can be achieved using a black dye such as nigrosin, while the second
can be achieved either using a monochromatic light source or by placing in
front of the camera lens.
In this ‘ideal’ case, if L is known
a priori, then we can readily determine the mean concentration as
 ,
,
where the combination aiL is typically determined
by calibration. Similarly, if  is know a
priori (typically by setting c(x,y,z,t) = c0
= const), then we can use the same relation to determine the thickness
(depth) of the layer from
is know a
priori (typically by setting c(x,y,z,t) = c0
= const), then we can use the same relation to determine the thickness
(depth) of the layer from
 .
.
If L is constant in time but varies
in space, it is often more convenient to determine this from an image of a
constant concentration of dye, rather than attempting to measure it everywhere.
Suppose the camera perceives an image of intensity PL when the experiment is filled with a constant
concentration of dye cL.
From this we can calculate
 ,
,
where QL = PL/P0, and substitute
back to determine
 .
.
Non-ideal dyes
If the dye is not ideal (i.e. it is neither neutral
density nor illuminated by a monochromatic light source) then additional
calibration is required. Recall that the camera perceives
 .
.
For a given illumination and camera response, we can
write  where g(j)
(which is bounded above by one) characterises the response of the dye as
where g(j)
(which is bounded above by one) characterises the response of the dye as
 .
.
If g(j) is invertible then we can
determine the concentration as
 .
.
As we saw above, for an ideal dye g-1(Q)
is  .
.
In general, however, we may not have a detailed knowledge of
the spectrum of the light source J(k),
the spectral response of the camera S(k)
or of the dye absorption a(k), but must instead determine
by calibration g(j) or, more usefully, the
inverse g-1(Q).
Suppose we determine, through a calibration procedure, that g-1(Q) » Dye(Q),
then we can proceed to compute or L.
In particular, if L is known a priori, then
 ,
,
while if is know a
priori then
 .
.
As before, if L is constant in
time but varies in space we can compute by introducing a
calibration image PL
of a uniform dye concentration cL to obtain
 ,
,
where QL = PL/P0.
Band-pass dyes
Some dyes can be approximated as being transparent to some
wavelengths of light while strongly filtering other wavelengths. The spectral
response of such a dye could be approximated by a(k) = a0 + a1H(k-k0), where H(×)
is the Heaviside step function, a0 (³ 0) and a1 are constant
attenuation rates and k0 is a constant wavenumber. If, further, we
assume the product J(k)S(k)
is constant for k1 £ k £ k2¸and zero outside
this range, then for such a dye g(j)
becomes
In the limits of a1 >> a2 and of a1 ~ -a0, then g(j) is well approximated by a constant plus a decaying
exponential. The constant term is due to little attenuation of light over some
bandwidth, while the exponential is due to a rapid (nearly constant)
attenuation of light over the remainder of the spectrum. As seen by a number of
previous authors, this model is a good approximation to the behaviour of some
food colourings when illuminated by white light.
DigiFlow interface

Figure 77:
Analysis of variations in background illumination to determine the dye
concentration.
This process takes either two or three source image
selectors, depending on whether the base optical thickness needs to be
calculated.
The Dye
Image group determines the image selector to be corrected. This
image selector may be selected from a file by clicking the File button, in which case the standard Open
Image dialog box (§4.1) is produced. Precise
details of the region and times to be used may be set using the Sift button (§4.3). Alternatively, clicking the Process button will allow a source
process to be used (refer to §7 on chaining
processes for further details).
The Background
Image group determines the image selector containing the
background illumination. Only the first image will be used if an image selector
containing multiple images is selected, although the particular image from a
sequence may be specified using the Sift button. As with the Dye Image group,
clicking File
activates the Open Image dialog box (§4.1), whereas
clicking Process
allows a source process (§7) to be used.
The resulting image selector is saved to the file specified
in the Concentration Image
group by clicking the Save As
button. If this process is acting as the source for another process, the Save As button is
suppressed (refer to §7 for further details).
The Controls
group allows user specification of the camera and dye calibration.
The Camera
calibration is applied to both the Dye Image and Background Image prior to their
processing. The calibration is specified as a function of the intensity in the
input image selectors, represented in the expression as the variable P (upper case). Note
that regardless of the format of the input selectors, all processing is
performed in floating point arithmetic and normally the images will be scaled
between an intensity of 0.0 for the darkest parts and 1.0 for the brightest
parts. Thus the default P
– 16/255 would set an intensity of 16 in an eight-bit greyscale
image to zero. Refer to §8 for further details on
the interpreter.
The Dye
calibration mapping is applied to the image(s) resulting from
this procedure. The mapping function should be specified in terms of the
intensity of the corrected image. Here this corrected image intensity is
expressed through the variable Q (upper case), which is again in the range 0.0 to 1.0.
The default for this calibration is dye_deal(Q), which is simply –ln(Q)
The normal processing undertaken
by this feature may be described as
 ,
,
where Camera(..) represents
the Camera calibration,
Dye(..)
represents the Dye
calibration, PDye is the Dye Image, PBack is the Background Image and PConc is the Concentration Image. The result of Camera(PDye)/Camera(PBack) is what is
provided in the variable Q,
thus PConc = Dye(Q).
However, strictly speaking, PConc is proportional to the integral of the dye
concentration over the length of the light ray seeing dye as it passes through
the flow. Thus, if the length of this light ray varies (e.g. due to tank
geometry or camera parallax), the PConc image is contaminated by this variation.
As noted above, by using an additional image, PL, of the tank containing
a uniform concentration of dye CL, it is possible to correct for this variation in
the length of the light rays. In such a case the required processing is
 .
.
This more advanced processing is enabled by checking Use Thickness Image.
This then enables the Thickness
Image group to determine the image selector containing the
background illumination. Only the first image will be used if an image selector
containing multiple images is selected. As with the Dye Image group, clicking File activates the Open
Image dialog box, whereas clicking Process allows a source process to be used.
5.6.3.2 Light Induced Fluorescence (LIF)
LIF, often referred to as Laser Induced Fluorescence but
more generally can stand for Light Induced Fluorescence, describes the family
of techniques where a sheet of light is used to stimulate emission from a
fluorescent dye. Typically this dye is dissolved in the fluid at very low
concentrations, rendering it a passive tracer, but which is used to tag some
other species (e.g. salt concentration) thereby providing a means of
visualising and quantifying an otherwise invisible component of the flow.
Fluorescent dyes are often used in fluids experiments to
obtain an image of the concentration field on a single plane of a flow. The
name often given to such techniques is LIF or Laser Induced Fluorescence.
However, the use of a laser is not obligatory, and white light may be used to
produce comparable results, provided the colour temperature of the light source
is sufficiently high. Xenon arc lamps, for example, provide an excellent and safer
alternative to the high cost of lasers.
The fluorescent dyes used in LIF typically absorb
energy from incident light over a range of wave lengths and radiate it at a
single or well defined range of wave lengths. Typically the absorption in the
range of wave lengths radiated is relatively small so that radiated light
passing through regions of fluid containing the fluorescent dye is not
attenuated significantly by that dye. Clearly the illuminating light must
attenuate as it passes through the dye. For most useful dyes the efficiency of
this fluorescence is relatively high so that only very weak solutions are
required and the attenuation of the illuminating light is small.
If the flow is illuminated by monochromatic light (such as a
laser, or at least coloured light with a narrow power spectrum) with a wave
length significantly different from that of the fluoresced light, then it is
possible to eliminate the effect of any light scattered directly from the
experimental apparatus or contaminants in the water by introducing a filter in
front of the camera to cut the wave length(s) of the light source. However for
reasons of cost, availability and safety, a laser was not employed for these
experiments. Thus our LIF images contain a component of directly scattered
light despite efforts to minimise this.
In all the LIF experiments reported here, sodium fluorescein
was used as the fluorescent dye. Its choice was based on its high efficiency,
low cost and relative safety. The light fluoresced typically appears green,
with the dye responding better to the blue end of the visible spectrum (this is
one of the reasons the blue-white light of the arc lamp was better than the
yellow-white light of the halogen light source).
As mentioned above, as the illuminating light sheet
passes through the dyed fluid, some of the light is absorbed thus reducing the
intensity of the light sheet. In addition, the light sheet will typically
diverge slightly, effectively reducing the intensity further. In order to
obtain quantitative information about the density field (as marked by dye
concentration) it is necessary to correct the LIF images for this attenuation
and divergence. In this subsection we briefly outline the technique used in
this work for performing this correction.
Consider an image p = p(x) of a flow containing a fluorescent dye of
concentration C = C(x). We define a virtual light sheet P = P(x) such that
P = C P. (2)
Assume that the attenuation of the virtual light sheet
as it passes through the dye can be described by
 (3)
(3)
where s describes the path of
the light rays and s = s(x) is the attenuation of the virtual light sheet.
Suppose we have a calibration image p0 of a constant concentration C0. Now we may
estimate the spatial structure of the attenuation from
 , (4)
, (4)
where  is the
least squares fit of
is the
least squares fit of
 (5)
(5)
to the calibration image p0 (it is
often necessary only to include the linear term in the exponential). Using our
estimate of the attenuation we can calculate an estimate  (say) for the virtual sheet from
(say) for the virtual sheet from
 (6)
(6)
and thus obtain our estimate of the concentration field
 , (7)
, (7)
where  is the
estimate for the virtual light sheet evaluated from equation (3).
is the
estimate for the virtual light sheet evaluated from equation (3).
We may determine how accurate this process is by performing
this process on the calibration image, and then comparing the result with the
known virtual sheet P0 = p0/C0 to obtain the
defect ratio
 . (8)
. (8)
In some cases we may wish to adjust our calculation for
other images using this defect ratio by determining
 . (9)
. (9)
This approximation guarantees perfect reconstruction of
the calibration image, but does not necessarily ensure an improved
concentration field for other images.
Another technique that can be useful is to use Rdefect to improve the
estimate to the decay law fit rather than as a direct modification to the
concentration field. To achieve this, a least squares fit of the same form as (5) is applied to Rdefect (which we would hope was a constant), and
the coefficients a1,
a2, etc.,
are used as a correction to those obtained from (5).
Applying this correction iteratively will ensure that in the mean Rdefect is unity.
LIF processing in DigiFlow
The processing of LIF images in DigiFlow is somewhat more
sophisticated than that described above, extending the basic idea to include
multiple point light sources, distributed light sources, and additional models
for the behaviour of light rays.
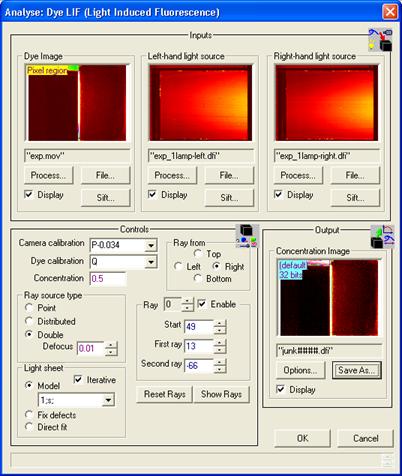
Figure 78: Dialog
controlling correction of LIF images.
The example illustrated in figure 78
is for Rayleigh-Taylor instability. In this case, the camera was rotated by 90
degrees so that the initially dense layer is to the left and the light layer to
the right. The flow was illuminated from below by a sheet of white light.
Fluorescent dye (disodium fluorescein) was present in the upper layer. The two
layers were initially separated by a barrier at half the depth of the tank.
The Dye
Image input image stream is the raw footage of the experiment.
The attenuation and divergence of the illuminating light sheet as it passes
through the fluorescent dye is clearly visible. In this case, the light sheet
is generated by a pair of 300W arc lamps, each effectively a point source. The Left-hand light source
and Right-hand light source
input streams give images of the two separate light sources illuminating the tank
when it contains a uniform concentration of dye. These images are used for
calibration purposes. Each of these three input selectors is specified in the
normal manner using the associated File and Sift
buttons.
The Controls
group contains the various parameters that affect the modelling of the light
passing through the dye. For this correction procedure to operate effectively,
it is important that the experiment is carefully set up, that there are no
stray reflections reaching the camera, and that all the necessary details are
recorded at the time of the experiment.
The Camera
calibration should specify the relationship between the digitised
values and real intensities. With most modern scientific CCD and CMOS cameras
the relationship is close to being linear. However, ‘black’ seldom digitises to
zero. Here, we assume a linear relationship with black digitising to a value of
0.034. A number of methods for determining this black level are described in §6.1.
Provided the concentration of the fluorescent dye is
sufficiently low, then the assumption that the fluoresced signal is linear in
its concentration is reasonable. Deviations from this may be entered in the Dye calibration
control.
The Concentration
value is the (arbitrary) concentration used in the calibration images Left-hand light source
and Right-hand light source.
Note that these images are used not only to calibrate the response of the light
sheet as it passes through the dye, but also to calibrate the intensity of the
light sheet entering the dyed region. In this latter context it is important
that these images (and also the experimental images) extent to the tank
boundaries where the light first enters the dye.
The Ray
from group indicates the direction from which the light rays
enter the image. Here it is the bottom of the tank which corresponds to the
right-hand side of the image. The Ray source type allows selection between single point
light sources, distributed light sources, and double point light sources. (The Right-hand light source
input stream is enabled only for the last of these.) The Defocus control recognises that the
lights might not in fact be true point sources and that they will become
slightly defocused as they pass through the flow.
Alongside the origin of the light rays is their direction
which will not normally be aligned exactly with the pixel coordinates. Indeed,
the light rays will typically be diverging. The Ray n
group provides a means of specifying the orientation of light rays. This
process is typically achieved by capturing an additional image of the uniform
concentration in which a grid has been imposed on the light sheet in order to
show clearly the direction of the light rays. This additional image (or two
additional images when double light sources are used) is temporarily loaded
into the Left-hand light
source stream. Clicking Show rays then superimposes the ray
definitions from the Ray n group on that image. Subsequent use of the controls
within this group allows interactive specification of the orientation of the
rays. It is recommended that three or four such light rays are specified as a
minimum.
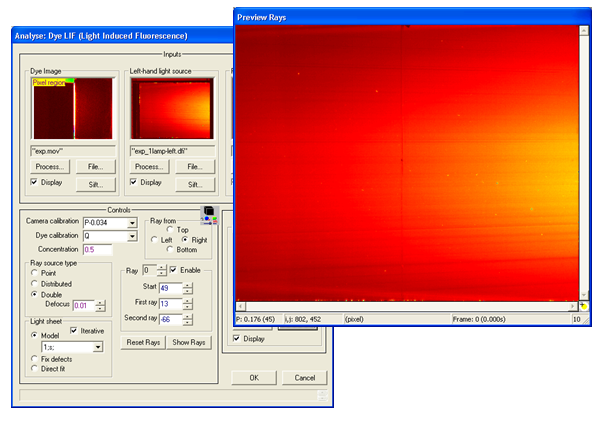
Figure 79: Light
ray definition for LIF processing.
Up to ten sets of light rays may specified. Each set
contains either one or two directions, depending on the Ray source type. The rays in each set
share a common Start,
but can have different rotations through the First ray and Second ray controls. The ray definitions
may be reset using the Reset
Rays button.
Modelling of the light sheet can be handled in a number of
different ways using the Light
sheet group. Both Model
and Fix defects
begin by fitting a model decay law (using least squares) to the calibration
image(s) to determine the relationship between fluorescence and attenuation. If
Iterative is
checked, then this process is performed iteratively to improve the model by
taking into account the directions of the light rays. In many cases the linear
model 1;s;
(corresponding to an exponential decay of light through the calibration image)
is most appropriate. However, in some circumstances higher order terms can
improve performance (a combination of visual inspection and tests for mass
conservation should be used to determine the optimal model).
The difference between Model and Fix defects is that the latter compares
the calculation performed on the calibration image with the ‘known’ constant
concentration it contains and develops a multiplicative correction to force a
uniform concentration in the output. This correction may be appropriate in
cases where optical imperfections alter the apparent lighting in a static
manner that does not coincide with the simple attenuation modelling.
Calculations using the Direct fit light sheet model are similar
to the other two, but rather than fitting an exponential decay law, the data in
the calibration image is used directly, pixel by pixel, to determine the
relationship between fluorescence and absorption. This approach is likely to
lead to a higher noise level in most situations, but may have advantages in
cases with complex optical effects such as reflections.
For most good quality experiments, the combination of Fix defects with 1;s; and Iterative selected
will yield the best results.
Finally, the output stream may be specified in the normal
way using the Save As
and Options
buttons.
5.6.4
Synthetic schlieren
Theory
Synthetic schlieren is a novel technique for producing
qualitative visualisations of density fluctuations and for obtaining
quantitative whole-field density measurements in two-dimensional
density-stratified flows. This set of techniques is outlined in detail in
Dalziel et al. (2000) (and a subset in Sutherland et al. 1999).
In this section, we discuss only the most advanced of these techniques,
‘pattern matching refractometry’, and how this may be applied to provide
accurate quantitative measurements of a two-dimensional density field.
While synthetic schlieren has its origins in the classical
optical schlieren and moiré fringe techniques, synthetic schlieren is much
simpler to set up than the classical schlieren and interferometry methods, and
provide useful information in situations where shadowgraph is of little or no
value. Moreover, they may be set-up to analyse much larger domains than is
feasible with the classical approaches, and do not require high quality optical
windows in the experimental apparatus. Ultimately the greatest strength of
these techniques is the ability to extract accurate, quantitative measurements
of the density field.
The basic setup for synthetic schlieren is illustrated in
figure 80. An illuminated mask (normally simply a
piece of paper printed with a pattern) with a strong pattern is placed to the
rear of the experiment. This mask is then viewed by the video camera looking through
the experiment.
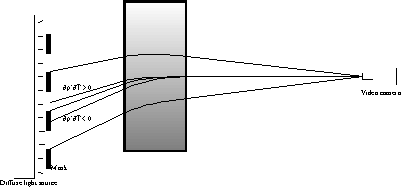
Figure 80:
Basic setup for synthetic schlieren. An illuminated textured mask is placed on
one side of the experiment, and is viewed by the camera on the other side of
the experiment.
The key idea behind synthetic schlieren is the bending of
rays of light by fluctuations in the refractive index field. A detailed
description of this process is required in order to make quantitative
measurements. This description may start from a number of points. Sutherland et
al. (1999) analysed a ray of light by invoking Snell’s law. Here we shall
start from Fermat’s variational principle for the behaviour of light in an
inhomogeneous medium
 , (10)
, (10)
where s is oriented along the
light ray and n(x,y,z)
is the refractive index field (the ratio of the speed of light through a vacuum
to that through the medium). We select our coordinate system (x,y,z) with x along the length of
the tank, y across the width (the direction in which
variations in the flow are negligible) and z
vertically upward.
Rather than solving the full variational problem, we
restrict ourselves to rays of light which always have a component in the y direction so that their paths may be described by x = x(y) and z = z(y).
This restriction is simply a requirement that light is able to cross the tank,
a fundamental requirement for synthetic schlieren. The variational principle
then gives rise to a pair of coupled ordinary differential equations (Weyl
1954) relating the light path to the gradients of n in
the x-z plane:
 , (11a)
, (11a)
 . (11b)
. (11b)
For synthetic schlieren we are interested primarily in light
rays which remain approximately parallel to the y
direction. Under this restriction the terms (dx/dy)2 and (dz/dy)2 may be neglected, effectively decoupling (11a) and ((11b). For a
two-dimensional flow where there are only weak varitions in density (and hence
weak variations in the refractive index) along the ray path, we may integrate
these expressions across the width W of the tank to
obtain the path of the light ray across the tank:
 , (12a)
, (12a)
 , (12b)
, (12b)
where xi, zi describe the incident location and tanfx = dx/dy(y=y0) and tanfz = dz/dy(y=y0) describe the
horizontal and vertical components (respectively) of the angle at which the
light ray enters the tank (measured relative to the y
direction).
With synthetic schlieren, we are interested in how an image
of a mask placed some distance B behind the tank
appears to change as the result of flow-induced refractive index variations
relative to the refractive index variations in the absence of the flow.
Specifically we wish to analyse the changes in the image formed by the camera
as a shift in the origin of the light ray reaching the camera. By back tracking
the light rays received by the camera the apparent shift (Dx,Dz) in the origin of the light ray is given by
 , (13a)
, (13a)
 . (13b)
. (13b)
Here we have decomposed the refractive index field n into n0 + nbase + n', where n0 is the nominal
refractive index of the medium (e.g. n0 = 1.3332
for water), nbase
represents spatial variations associated with the “known” base state (e.g.
the changes introduced by adding a quiescent linear background stratification)
and n' is the variation caused by the flow under
consideration (e.g. the internal wave field). In obtaining (13) we have assumed the variations nbase and n' in the
refractive index field are small compared with the nominal value n0. (As we will see
below, a correction is necessary to take into account the refractive index
contrasts between air, the material the tank is made of and the working fluid.)
In many cases, it is more convenient to consider the
apparent displacement of the origin of the light rays in terms of their
projection on the experiment in the absence of any fluctuations in the density
field. This then allows us to use a common coordinate system for both the
coordinates within the experiment and for the texture mask located behind the
experiment. Taking the distance between the texture mask and the camera as L, and assuming that the experiment is ‘thin’ (i.e. W/L << 1), then we may use
simple projective geometry to show that the apparent displacements in
experiment coordinates are
 , (14a)
, (14a)
 . (14b)
. (14b)
Here we have defined the experiment coordinate system
to be at the mid-plane of the experiment. If W/B << 1 or (B+½W)/L << 1, then the precise
location of the coordinate system within the experiment is unimportant. Note
also that the optical gain provided by increasing B is
greatest for large L.
The above expression, however, ignores the effect of the
refractive index change between the tank and the (presumably) air between the
tank and the mask. Taking the refractive index of air as nair, then this amplifies the slope on exit from the
tank by n0/nair.
An additional correction can also be made for the refractive index of the tank
wall, nwall. This
does not change the slope within the air, but does provide an additional
offset. If the tank wall has thickness T and we
measure B from the outside of the tank wall,
then (14) becomes
 (15a)
(15a)
 (15b)
(15b)
in the coordinate system of the textured mask.
Similarly, if the experiment is not thin, then the magnification term
projecting this onto the central plane must take into account the refractive
index variations for rays entering and leaving the tank. The net result of this
is that
 , (16a)
, (16a)
 . (16b)
. (16b)
As stated above, there is normally a constitutive
relationship between the density of the fluid and the refractive index. To a
good approximation the relationship between refractive index and density for
salt water is linear (Weast 1981), allowing us to write
 , (17)
, (17)
where
 , (18)
, (18)
and r0 is the nominal reference density (1000kg m-3). Substitution into (13) then gives the relationship between density
fluctuations r' and apparent
movement of the source of a light ray
 , (19a)
, (19a)
 . (19b)
. (19b)
Simply measuring the apparent displacements and
inverting (19) then allows us to determine the
perturbation density gradient. This may, in turn, be integrated once to return
the density perturbation itself.
The main difficulty is determining the apparent
displacements Dxexp and Dzexp with sufficient
accuracy for the whole process to be meaningful. Often the apparent
displacements are only a small fraction of a pixel. DigiFlow employs a range of
techniques to achieve this. The most accurate, but computationally expensive,
use powerful pattern matching techniques to determine the apparent displacement
as accurately as possible: the design of this part of the system has
concentrated more on accuracy than speed. DigiFlow also offers faster (but less
accurate) techniques to provide a reasonable approximation relatively quickly.
5.6.4.1 Qualitative Preview
Toolbutton:
Shortcut:
Related commands: process Analyse_SyntheticSchlierenQualitative(..)
This option provides a qualitative or semi-quantitative
preview of an image sequence using relative simple processing to determine the
gradient of the perturbation density field. The processing used here is similar
to that provided during Video
Capture (see §5.1.5).
Starting the option provides access to a simple dialog box
(see figure 81) for selecting the input image
stream (Experiment
selector) and, optionally, a Background
Image. If the latter is not specified, then the first frame of
the Experiment
file is utilised. Both these selectors have the standard Sift button (see §4.3).
Figure 81:
Dialog for determining which sequence is to be previewed with synthetic
schlieren.
Once the sequence has been identified, an image window is
opened to show the preview. The preview itself is controlled by a second
dialog. Some of the controls on this dialog are reminiscent of those seen in §5.5.1.14 for controlling the animation of sequences.
Controls specific to synthetic schlieren are found in the Processing and Gain groups. The first of these
determines the type of processing to be performed.

Figure 82:
Control dialog for qualitative synthetic schlieren preview.
There are four processing options: Direct simply shows the input stream
without any processing, while Difference
is the simplest (and computationally fastest) technique that provides a
qualitative output proportional to the magnitude of the gradient in the density
perturbation. The Horizontal
gradient and Vertical
gradient options perform more a more sophisticated analysis that
returns a semi-quantitative output of the specified component of the gradient
in the density perturbation. Note that these two options distinguish between
positive and negative gradients.
The Gain
control determines the relationship between the gradient and the intensity of
the display. The display colour scheme may be changed using Colours, and a different set of input
streams may be used by clicking Selectors.
(a) (b)
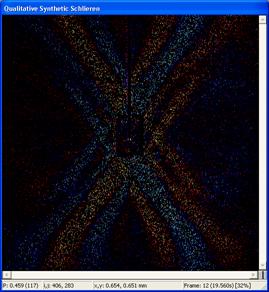
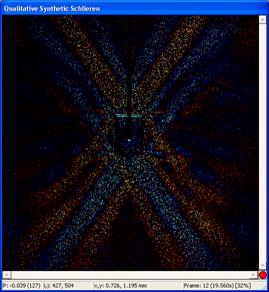
(c) (d)
Figure 83:
Examples of output from Qualitative Synthetic Schlieren. (a) Direct, (b) Difference, (c) Horizontal gradient and (d) Vertical
gradient.
The Synchronise
display check box forces synchronisation such that each and every
frame in the sequence is displayed, even if this slows the update rate below
the desired frame rate. If Synchronise
display is cleared and the computer cannot keep up with the
desired frame rate, then frames are skipped to maintain that frame rate.
5.6.4.2 Interpolative
Toolbutton:
Shortcut:
Related commands: process
Analyse_SyntheticSchlierenInterpolative(..)
The method of calculating the synthetic schlieren image used
in this option is a compromise between speed and accuracy. While it is based on
a similar technology to that used in the Qualitative Preview version of synthetic
schlieren discussed in §5.6.4.1, the algorithm is
tuned to give a wider dynamic range, greater accuracy, and more complete
coverage of data. However, the resulting measurements remain less accurate than
those obtained using Pattern
Matching version of synthetic schlieren (see §5.6.4.3).
The processing here was conceived for masks located behind
the experiment containing lines, however experience has shown that it also
provides reasonable semi-quantitative measurements for other mask geometries (e.g.
random dots).
Suppose the changes in the refractive index gradient give an
apparent vertical displacement of the mask by some amount Dz at time t.
We shall assume the curvature in r'
is small so that Dz
varies only over length scales large compared to the features contained in the
mask.
As we have seen, the intensity of a pixel is related to the
mean of the (unknown) intensity falling on the CCD sensor by
 . (20)
. (20)
The combination of optical imperfections, noise and
imperfections in the mask will ensure that p(x,z;t) is a continuous function, even when the mask contains
discrete steps. We may approximate p(x,z;t) using a piece-wise quadratic interpolation in a
manner similar to that employed for numerical solution of the advection
equation in control volume techniques. The idea here is that the approximation Pij(t) = p(xi,zj;t)
(approximating the integral in (20)) by the
so-called mid-point rule for numerical integration) has an error O(Dz3) which is of
the same order as the error in a quadratic interpolation of the intensity (xi,zj). More specifically, if 0,ij(z-zj)
is the quadratic interpolation of the unperturbed image around (xi,zj), we look to solve for the value z-zj = Dzij such that 0,ij(Dzij) = Pij(t). Thus the apparent
displacement (in the z direction) of the mask Dzij is given by the roots of
P0,0 - P + ½(P0,1 - P0,‑1)Dz + ½(P0,1 - 2P0,0 + P0,‑1)Dz2 = 0. (21)
Here we have used the shorthand P = Pij(t), P0,0 = P0,ij, P0,‑1 = P0,i,j‑1 and P0,1 = P0,i,j+1. To avoid ambiguity as to which root of (21) should be taken, we solve (21)
only if P0,0 is
intermediate between P0,-1
and P0,1, and
the intensity contrast across the three lines is sufficiently large (i.e.
|P0,1‑P0,‑1| > DPmin). Further, we select the root of (21) with smallest |Dz|, effectively limiting Dz to be less than
the spacing of the lines on the mask.
As an alternative to solving the quadratic expression for Dz given by (21), we may utilise a binomial expansion to show that
this process has the same O(Dz2) accuracy as
assuming Dz is
quadratic in P0,ij. This latter approach was used by Sutherland et
al. (1999) and gives
 . (22)
. (22)
As with (21), Dz is calculated from
(22) only if P0,0 is intermediate between P0,‑1 and P0,1, and there is sufficient intensity
contrast across the three lines.
Once Dz
has been determined from either (21) or (22), it is mapped from pixel space into physical space
and (19) is applied to determine ¶r'/¶z. Points for which Dz could not
be calculated (typically points where ¶P/¶z is too small, as may occur if a line is centred on a pixel
and would lead to an ambiguity in the sign of the displacement) are replaced by
interpolated values using a Gaussian weighting function. The final result is
scaled and used to construct an image representing ¶r'/¶z.
In the present implementation, if the value of Dz determined from (22) exceeds one pixel then the reference image
intensities are themselves displaced so as to avoid extrapolation. This
effectively increases the accuracy and dynamic range of the technique.
Inputs tab
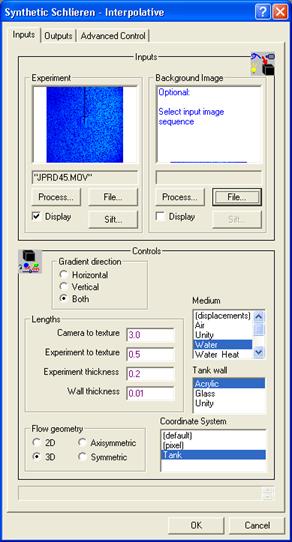
Figure 84:
The inputs dialog tab for interpolative synthetic schlieren.
The Experiment
stream, specified using File
and optionally sifted with Sift,
should contain an image of a strong texture located behind the experiment.
DigiFlow then compares this input stream with a reference image to determine
the apparent displacements. The reference image may be specified using the
optional Background image
input stream. If no stream is specified, then the first frame of the Experiment input
stream is used instead.
As noted above, this method was conceived for masks
containing lines, in which case Gradient
direction should be set normal to the lines. The most accurate
results will be obtained in this configuration. However, if the mask contains
two-dimensional features (such as random dots), then it is possible to generate
Both in-plane
components of the gradient.
The Flow
geometry group enables internal processing options that attempt
to ensure the result is consistent with the underlying geometry of the flow.
Details of the experimental setup are required in the Lengths group to
allow interpretation of the apparent movements of the dots. The units for these
should be consistent with the units for the density gradient that will be determined.
Ultimately, the output will be (1/r0)Ñr¢, which has dimensions of 1/length. Specifying the distances here in metres will give
units of m-1 for the final result.
Note that a distance of zero is acceptable for Experiment to texture,
the distance from the back of the experiment to the texture mask, but not for Experiment thickness.
The Experiment thickness
should be the internal measurement of the tank, while Experiment to texture should be measured
from the outside of the tank. The Wall thickness should be specified for the wall closer to
the texture, and its corresponding Tank wall material selected.
Camera to
texture is the distance between the effective focal plane of the
camera and the texture mask. It is generally sufficient to measure the distance
from the base of the lens to the texture. Experiment to texture is the distance
from the back of the experiment to the texture mask. This distance can be zero
for some set ups. Experiment
thickness is the width of the flow through which the light rays
experience density fluctuations. This cannot be zero.
The Medium
list box allows selection of different media for the experiment. The key
detail, picked up from a DigiFlow data base, is the relationship between
refractive index and density changes. In addition to the normal media, two
pseudo media are also included: Unity
returns refractive index gradients rather than density gradients, while (displacements)
returns the calculated apparent displacements (with units of the selected
coordinate system) rather than density gradients.
The coordinate system required to interpret the experiment
is specified in the Coordinate
system list box.
Outputs tab
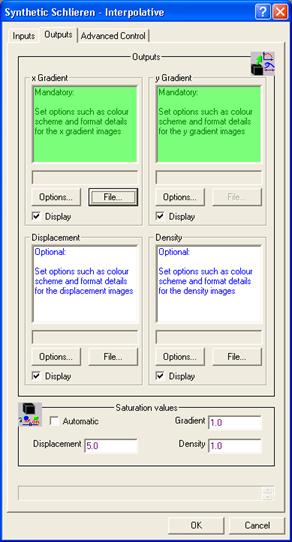
Figure 85:
The outputs tab for interpolative synthetic schlieren.
The most important controls on the Outputs tab are for selecting the main
output streams x Gradient
and/or y Gradient.
Whether one or both of these is required depends on the selected option in the Gradient direction
group on the Inputs
tab. The visual scaling of the images produced is determined by the Gradient entry in the
Saturation values
group. This value sets the gradient that will produce a saturated image. For
most image formats, getting this wrong will require reprocessing of the image
due to quantisation errors introduced. For this reason the use of the .dfi file format is
recommended as this does not sacrifice dynamic range and the scaling may be
subsequently changed at a later date.
Advanced control tab
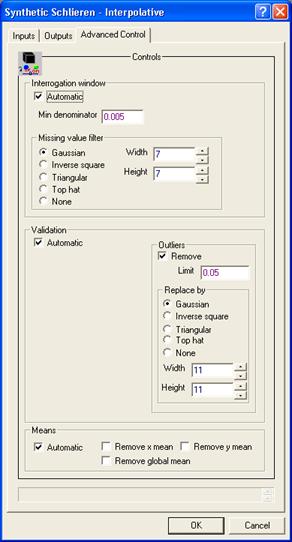
Figure 86:
The advanced control tab for interpolative synthetic schlieren.
In most cases the controls on the Advanced control tab should be left on Automatic. The Interrogation window
group controls the limits on the quadratic interpolation that must be satisfied
before the results can be used, and also controls how to fill in any missing
values. The Validation
group determines how to check for consistency with neighbouring points.
5.6.4.3 Pattern Matching
Toolbutton:
Shortcut:
Related commands: process Analyse_SyntheticSchlierenPatternMatch(..)
The most sophisticated (and slowest) of the synthetic
schlieren algorithms is based on an advanced pattern matching algorithm that
has its origins in PIV (Particle Image Velocimetry; see §5.6.5.2).
The mask behind the flow giving the texture to the image is
typically constructed from random features of high contrast. The simplest way
of generating this is by printing a pattern onto overhead projector
transparencies and then tiling these up into a sheet of the required side with
clear adhesive tape. The following PostScript file may be used to generate a
suitable pattern. The pattern is a basic square grid of dots, with each of the
dots perturbed by a random amount. The randomness helps prevent aliasing errors
and ensures that the pattern is robust against any defects produced when you
overlap slightly multiple tiles of transparency.
%!PostScript
% Generate dot pattern for synthetic schlieren
/mm {25.4 div 72 mul} def
% Set the basic size of the pattern (mean spacing in mm)
/Size 2 def
% Set the size of the sheet
/Sheet 300 Size mul def
% Relative size of dots to their mean spacing
/DotFraction 0.25 def
% Scale for randomnesss
/Randomness 0.6 def
% Draw black background
0 0 moveto
Sheet mm 0 rlineto
0 Sheet mm rlineto
Sheet mm neg 0 rlineto
closepath
0 setgray
fill
% Draw grid of white dots with random perturbations
1 setgray
0 Size Sheet
{/y exch mm def
0 Size Sheet
{/x exch mm def
gsave
x rand 0.25e9 div Size mul Randomness mul add
y rand 0.25e9 div Size mul Randomness mul add
%x y
translate
0 0 Size DotFraction mul mm 0 360 arc
closepath
fill
grestore}
for}
for
% Set number of copies of sheet to be made
/#copies 2 def
showpage
This PostScript file can be simply copied to any PostScript
printer. If a PostScript printer is not available, an interpreter such as
GhostScript/GhostView could be used. The pattern should be scaled (using the /Size definition)
so that the dots are close to the limit of what the camera can resolve. Some
trial and error may be required to determine the optimal size for a given
experimental setup.
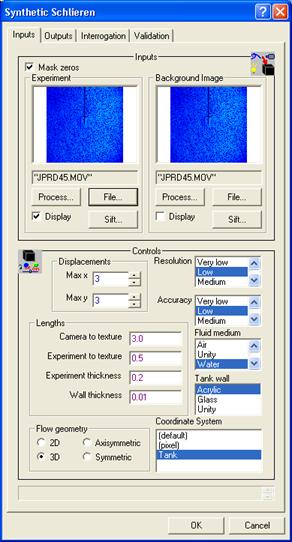
Figure 87: The Inputs
tab of the synthetic schlieren dialog.
The synthetic schlieren interface is divided into six tabbed
dialogs. The first two, Inputs
and Outputs are
mandatory and control what is to be processed, and where the results are to be
stored, respectively. The other four tabs, Interrogation, Validation, Quality and User Interpolation may be used by
experienced users to tweak the process to yield better performance in some
situations. The more advanced controls on these tabs are not available under
the Free DigiFlow Licence.
Inputs page
The standard synthetic schlieren process takes two input
streams. The first, specified by the Experiment group, is the video sequence of the experiment
itself. As normal, an image selector is used to specify the stream.. This
selector may be specified from a file by clicking the File button, in which case the standard Open
Image dialog box (see §4.1) is produced.
Alternatively, clicking the Process
button will allow a source process to be used (refer to §7
on chaining processes for further details).
The Background
input takes a single image (specified in the normal manner). This image should
be of the background texture mask before the experiment introduces any
density perturbations. Typically, this image is taken just prior to the
experiment, and contains all the ambient refractive index variations due to,
for example, a background density stratification.
The Mask
zeros check box causes DigiFlow to ignore all pixels with an
identically zero intensity. This feature is designed to allow simple masking of
images. Such masking may be used to remove parts of the field of view that do
not contain the flow. For example, it could be a static boundary to the flow, a
free surface, or possibly an object moving through the flow. In each case
external processing of the image sequence should be made to apply the mask
prior to starting the synthetic schlieren processing.
There are eight groups of controls on the Inputs tab. The first
controls maximum apparent displacement that will be searched for. The values Max x and Max y are specified
in pixels and are assumed symmetric about zero. These values should be set to
represent slightly more than the maximum expected apparent displacement of the
mask. In most circumstances this will be limited to two or three pixels, and
will generally be isotropic (hence specify the same values for Max x and Max y). Note that the
computation required to determine the displacement increases approximately as
the product of these two values, hence specifying excessively large values is
counterproductive.
The Flow
Geometry group is used to indicate the basic geometry of the flow
under consideration, and control the invocation of processes optimised for the
specific geometry. The entries 2D
and 3D have the
obvious meaning. Similarly, Axisymmetric
is for flows where the symmetry axis lies in the mid-plane (normal to the
viewing axis) of the experiment, and Symmetric is for flows where the mid-plane is a plane of
symmetry, but the flow is not axisymmetric.
The Lengths
group specifies the geometric setup of the experiment. The distances should
be specified in the same units as the selected coordinate system (see
below), or it will be difficult to interpret the results of the calculation.
Note that a distance of zero is acceptable for Experiment to texture, the distance from
the back of the experiment to the texture mask, but not for Experiment thickness. The Experiment thickness
should be the internal measurement of the tank, while Experiment to texture should be measured
from the outside of the tank. The Wall thickness should be specified for the wall closer to
the texture, and its corresponding Tank wall material selected.
Both input streams may be sifted (§4.3)
to extract the desired subregion and times. This feature is activated using the
Sift button
associated with each of the input streams.
To provide a simplified interface to the internal workings
of the synthetic schlieren algorithm, DigiFlow provides a range of predefined
settings that have the effect of producing different resolutions and
accuracies. The Resolution
and Accuracy
list boxes both have six possible settings: Very low, Low, Medium, High, Very high and Best. The choice will depend on a combination
of the intended purpose of the results, and the time available to undertake the
processing. The fastest processing is achieved at the Very low end of both scales, while the
most detailed and accurate measurements are obtained with both Resolution and Accuracy set to Best. In the latter
case, even with relatively basic analogue video equipment, the accuracy with
which the apparent movement of the texture mask may be detected can be better
than 1/100 of a pixel, and the spatial resolution of the measurements is a few
pixels. By default, the Resolution
and Accuracy
controls will be enabled. However, if the Automatic check box for the Interrogation window
group on the Advanced Control
tab is cleared, then the Resolution
and Accuracy
controls will be disabled.
To determine the relationship between refractive index and
density, DigiFlow requires that a fluid medium is specified with the Medium list box. This
box contains a range of standard fluids (e.g. Water and Air), plus the special fluid Unity in which all
the physical constants are set to unit values. In the context of synthetic
schlieren, DigiFlow extracts the value of b = (r0/n0)(dn/dr)
(see (17) and (18)) for
the selected medium. Additionally, (displacements) will cause the pattern matching process
to return the apparent displacements of the mask rather than the density
gradient.
The final input on this tab is Coordinate System. This specifies the
coordinate system that will be used to relate pixel to world coordinates. The
coordinate system is assumed to have been defined in the mid-plane of the
experiment (not the plane of the dots). See §5.2.6
for further details on setting up a coordinate system.
Outputs page
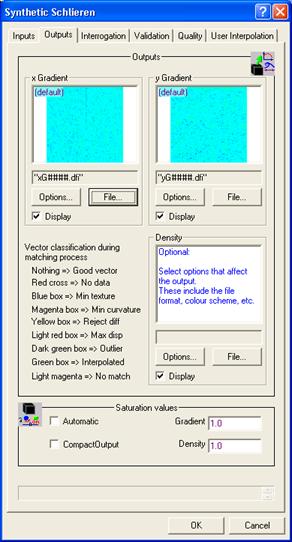
Figure 88:
The Outputs tab of the synthetic schlieren dialog.
The Outputs
tab controls the destination and scale of the output from the synthetic
schlieren calculation. This dialog page consists of three image selectors, each
with its own Options
and File
buttons and Display
check boxes. The destination for the output stream is selected by clicking the File button (thus
starting the standard Open Image dialog box; see §4.2),
while the colour scheme and other related details are selected with the Options button (see §4.4).
The x
Gradient, y
Gradient and Density
images are centred with a zero value corresponding to half the intensity range
(i.e. 128 for an 8 bit image format). Saturation corresponds to the
values given in the Scales
group for Gradient
and Density. The
gradient images have the units of ‘per unit length’ (what the unit length is
depends on the coordinate system selected), and represent Ñr¢/r0, unless (displacements) was specified for .the Fluid Medium on the Inputs tab.
The optional Density
output (not available with free licences) is calculated by a least squares
integration of the density gradient field. In general, integration of a vector
field to find a scalar potential is not unique, as the vector field will
contain both irrotational and rotational parts. With synthetic schlieren, the
density gradient field should be irrotational, which would make the integration
unique, but inevitable measurement noise renders some rotational component. The
integration procedure used in DigiFlow aims to find the scalar potential (here r¢/r0) that minimise the root mean square of this
rotational part (effectively minimising the enstrophy), hence is a least
squares solution. The solution process is achieved iteratively using a
multigrid approach that is aware of any missing data or masked regions in the
synthetic schlieren results. (Inevitably, there is some data loss in the
neighbourhood of any masked regions.) The integration procedure leaves one
unknown arbitrary constant of integration which DigiFlow sets by forcing the
spatial mean density perturbation to vanish. Of course, this may not always be
appropriate.
The DigiFlow Data format (.dfd) or DigiFlow Pixel format (.dfp) may be specified
for any of these output images so that the data is readable in other
applications. However, it is recommended that the .dfi floating point format is used if
you wish to make quantitative use of the data.
Selecting the Compact check box causes DigiFlow to save an
approximation to the calculated density gradient field by only saving the
gradient at the nominal location of the interrogation windows used to calculate
the gradient. DigiFlow will automatically expand out this approximate gradient
field, when it is reloaded, to produce one that is very close to that saved
without the Compact
option. The files produced, however, are much smaller.
Figure 89 shows an example of
the density gradient fields and the density perturbation. Note that in all
cases they are normalised by the reference density r0. The density gradient fields therefore have
dimensions of per length; it is important that you use the same units for the Lengths group on the Inputs tab as you use
in the chosen coordinate system, or else it will be difficult to interpret the
output!
You may choose not to calculate the density perturbation
while doing the synthetic schlieren computation, but instead calculate it later
from the density gradient field. Tools: Recipies contains a suitable recipe to do this in
the Differential
group.
(a) (b) (c)
Figure 89:
Example of synthetic schlieren output. (a) (1/r0) ¶r¢/¶x, (b) (1/r0) ¶r¢/¶x and (c) r¢/r0 for a thermal plume erupting from a boundary
layer.
Interrogation page
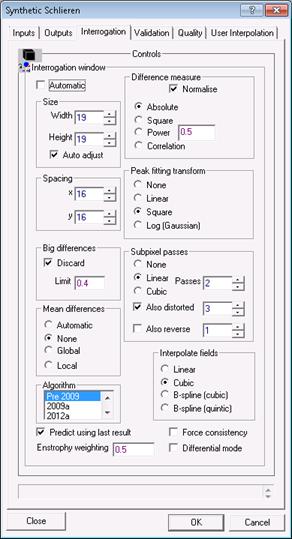
Figure 90: The Interrogation
tab of the synthetic schlieren dialog.
The Interrogation
page enables direct control over many of the underlying values of the synthetic
schlieren calculation. For most users, checking the Automatic box yields optimal
performance, with the Resolution
and Accuracy
controls on the Inputs
tab providing all the performance tuning necessary. Advanced users, however,
may wish to fine tune the processing manually; clearing the Automatic check box enables the
remaining controls and disables the Resolution and Accuracy controls on the Inputs tab.
The Size
subgroup controls the Width
and Height of
the interrogation window. Increasing the size of the window increases the
accuracy, but decreases the spatial resolution and slows the computation. If
the window is too small, relative to the pattern size, then very poor results
are achieved. The Adjust
check box specifies whether DigiFlow can adjust the size of the window if it
thinks this is necessary to produce more reliable data.
The Spacing
subgroup has the most direct control on the spatial resolution of the synthetic
schlieren computation. This specifies the x and y spacing between points where the
pattern matching process is undertaken. Clearly reducing this value, specified
in pixels, increases the amount of computation, but may not always increase the
spatial resolution due to the interplay with the Size of the interrogation window.
The Difference
measure subgroup specifies the type of difference calculation.
This is the function that DigiFlow minimises as it searches for the correct
apparent shift. In practice, there is little to choose between the three
functions. The Absolute
option is computationally a little cheaper, while Correlation is that frequently used in
PIV techniques. Table 1 summarises the various difference measures f that may be
used in DigiFlow. Note that in all cases the summation is over N valid pixels in the interrogation region. The Power option is
simply a generalisation of Absolute
and Square. The
Normalise check
box rescales each of the measures, based on the strength of the texture in the
interrogation region.
|
f
|
Standard
|
Normalised
|
|
Absolute
|

|
|
|
Square
|

|
|
|
Power
|

|
|
|
Correlation
|
|
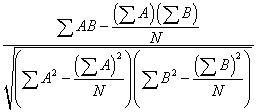
|
Table 1: The
difference measures used in DigiFlow pattern matching.
The Peak
fitting transform group determines the method of processing
interpolating in the neighbourhood of the smallest value of the difference
measure f (or largest value, for the case of the
correlation measure) in order to provide an improved estimate. In all cases a
bi-quadratic least squares procedure using nine points is employed. However,
DigiFlow provides the option of transforming the difference measure prior to
undertaking the fitting. The possible transformations are shown in table 2. Note that the logarithmic option
effectively assumes a Gaussian form for the difference measure in the
neighbourhood of the optimal shift.
|
|
None
|
Linear
|
Square
|
Log
|
|
Absolute
|
f
|
f
|
f 2
|
log(f)
|
|
Square
|
f
|
Öf
|
F
|
log(f)
|
|
Power
|
f
|
f 1/p
|
f 2/p
|
log(f)
|
|
Correlation
|
f
|
f
|
f 2
|
log(f)
|
Table 2: Transformation
of the difference measure f prior to computing
bi-quadratic least squares fit.
The Subpixel
passes subgroup has a pronounced effect on the accuracy,
resolution and speed of the calculation. The radio buttons determine the basic
type of treatment to obtain improved subpixel accuracy: None is the fastest but least accurate. Linear offers a good
compromise between speed and accuracy, while Cubic provides the best results, but is
substantially slower. The Passes
edit box controls the number of levels of subpixel treatment. For Linear a value of 1
to 3 is recommended, while Cubic
normally only requires 1.
The Interpolate
fields radio group controls how the data, initially obtained only
at the centres of the interrogation zones, is expanded to fill the complete
image. The simplest option of Linear,
which uses a bilinear interpolation, tends to end up with an artificial
appearance. The next level of sophistication, Cubic, produces a good balance between
speed and accuracy. While the resulting fields are continuous, they are not
continuously differentiable. This problem is overcome by the computationally
more expensive cubic b-spline and the quintic b-spline. For most circumstances
either the cubic or cubic spline provides the best compromise between
computational efficiency and accuracy.
If the interrogation window Spacing is small to improve the spatial
resolution, then it is recommended that Also distorted is checked. This enables
DigiFlow’s unique image distortion technology to substantially increase the
spatial resolution. A further improvement in both resolution and accuracy may
obtained in some circumstances by also checking Also reverse.However, for high quality
images, undertaking the reverse pass may lead to a deterioration in the quality
of the results.
Checking Discard
in Big differences
will dynamically discard pixels that DigiFlow determines may not belong to the
pattern it is trying to match. While discarding valid pixels can detrimentally
affect the signal to noise ratio, retaining invalid ones can have an even more
serious effect. The Limit
controls the level at which pixels are discarded.
For images that have a poor signal to noise ratio, a
fluctuating level of illumination, and strong spatial gradient in intensity, a
spurious signal can be obtained from the interaction between the spatial
gradient and the temporal fluctuations. The Mean differences group controls whether
DigiFlow will attempt to correct for this by rescaling the image intensities to
remove this signal. Selecting None
will turn off the image rescaling to deal with mean differences between images,
while Global
will force the mean intensity of the two images (excluding any pixels of zero
intensity) to be the same. The processing invoked by Local is similar to that of Global except that it
does it locally for individual interrogation windows. While Local may superficially seem the most
attractive, the results are much more sensitive to noise and should only be
used when there is no other solution. The Automatic setting will attempt to assess
which of the other three settings is most appropriate.
The Algorithm
control provides access to different internal versions of the pattern matching
algorithm, thus ensuring backward compatibility.
The Enstrophy
weighting controls the weighting applied to the condition that
the apparent displacements must be expressed as the gradient of a scalar when
determining the optimal apparent shift of the dots. The way in which this
weighting is used depends on the Flow geometry setting in the Inputs tab.
Setting Predict
using last result will suppress the initial pixel pass for points
where a result has been calculated previously. This reduces the time required
to converge on a solution.
Validation page
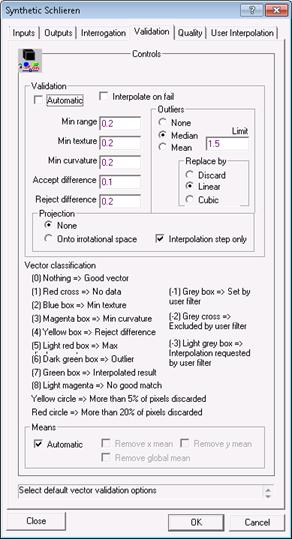
Figure
92: The Validation tab of the synthetic schlieren dialog.
Clearing the Automatic
check box in the Validation
group allows direct user control over the parameters that control validation of
the individual apparent displacement vectors. Min texture prohibits computation when
the standard deviation of intensity within the interrogation window is less
than the specified value. Similarly, Min range sets the minimum range (maximum minus minimum
values) the intensity within the interrogation window must have before
computation is permitted. Min
curvature imposes a lower limit on how sharp the difference
measure around optimal apparent displacement must be, while Reject difference imposes an upper bound
on the difference measure. If the difference measure exceeds Accept difference multiplied
by the range of intensities within the interrogation window (but is less than Reject difference,
again multiplied by the range within the interrogation window) then it is
subject to additional checks and processing to try to improve and ensure the
quality of the resulting data.
The Outliers
subgroup handles the identification and resolution of apparently erroneous
data. For a well set up experiment, there should not be any erroneous data to
be corrected. This feature is enabled by the Remove check box, with Limit applying to the
difference between the value at the point and the mean of the neighbouring four
vectors. This limit is expressed in terms of the apparent pixel displacements.
If the Limit is
exceeded, then the value is either Discarded, or relaxed towards a Linear or Cubic interpolation.
The apparent displacement field visualised by the synthetic
schlieren is due to the gradient of the refractive index field. As such, the
apparent displacement field should be irrotational since curl(grad(×)) º 0. The Projection group attempts to make use of
this as part of the validation process by projecting the measured displacement
field onto an irrotational space when Onto irrotational space is selected.
This projection will be made for every iterated value of the measured
displacement field unless the Interpolation
step only box is checked. When checked, the projection will only
be applied to displacement fields used to the steps used to distort the images.
The final group, Means, is enabled by clearing its Automatic check box. The three check
boxes within this allow for the removal of apparent mean gradients in the
measurements. The Remove x
mean control scans the data for each y
and removes any mean apparent displacement for that y.
The Remove y mean
performs a similar calculation for each x, while Remove global mean
simply calculates the mean apparent displacement for all the data, and
subtracts this from the data. In most circumstances it is unnecessary to remove
the means, but there are times when extraneous optical effects, or experimental
setups such as having the camera and texture mask mounted on a traverse, will
make this facility desirable.
Quality
DigiFlow determines a range of additional information about
the apparent displacement field that represents the density gradient during the
processing of the experimental images. While for most users this additional
information is of little value, the Quality tab makes it possible to output some of this for
advanced users.
This output requires a .dfi file if all the information is to
be retained as there are multiple planes of data available. In particular,
these planes contain the following information:
|
Plane
|
Description
|
|
0
|
Difference measure. This is the value of the difference
measure (see Table 1) for the final match.
|
|
1
|
x curvature. The curvature in the difference measure in
the neighbourhood of the final match.
|
|
2
|
y curvature. The curvature in the difference measure in
the neighbourhood of the final match.
|
|
3
|
State. Indicates the state of the pattern matching.
State values are integer (although stored as floating point) as follows:
0 Good vector
1 No data
2 Insufficient texture
3 Insufficient curvature in difference measure
4 Difference too great – rejected
5 Displacement too great
6 Outlier
7 Interpolated value
8 No match found
-1 Value
set by user dfc
code
-2 Value
set by user interpolation code
-3 Value
excluded by user dfc
code.
|
|
4
|
Fraction discarded. The fraction of the pixels in the
interrogation window that were discarded due to them being too different
between the two images.
|
|
5
|
x vector position. Stores the location (in world units)
at which the vector was determined.
|
|
6
|
y vector position. Stores the location (in world units)
at which the vector was determined.
|
|
7
|
x displacement. Stores the actual displacement (in
pixels) determined.
|
|
8
|
y displacement. Stores the actual displacement (in
pixels) determined.
|
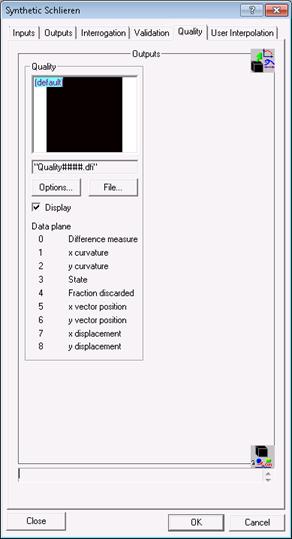
Figure 93:
The Quality tab for synthetic schlieren.
User Interpolation
As part of the pattern matching procedure, DigiFlow
interpolates the apparent displacement field determined at discrete points to
the entire image plane in order to distort the images. The performance of the
pattern matching depends on the quality of this interpolation, but the default
techniques may not always be optimal. Hence, the User Interpolation tab provides the user
with a way of bypassing the default mechanism and supplying their own
customised scheme.
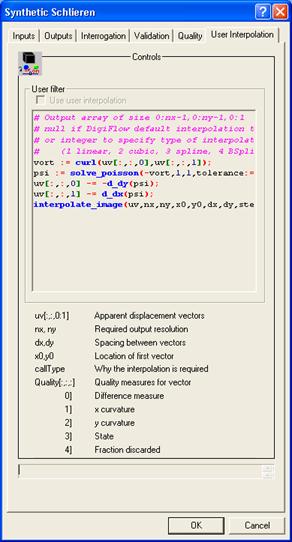
Figure 94:
The User Interpolation tab for synthetic schlieren.
The tab is activated only if Automatic interrogation is turned off on
the Interrogation
tab, and the Use user interpolation
check box is checked on the User
Interpolation tab. The default sample code uses a weighted least
squares approach to completing the interpolation. This is more computationally
costly than the default method, but provides a more robust method of handling
missing data.
Parameters passed to this code include the
interrogation-window apparent displacement vector uv, the required output resolution nx, ny, the nominal
interrogation window size wx,
wy (in
pixels), the spacing between the vectors dx, dy (in pixels), the location of the
first vector x0,
x1, and
the quality measure Quality.
The string calltype
indicates the point in the algorithm when the call to the filter is made. This
may take one of the values "Pixel",
"SubPixel",
"Reverse",
"Distorted"
or "Final".
The experimental image Pa
and background image Pb
are also available.
Processing
When OK
is pressed, the dialog box will check that all mandatory values have been
entered. If they have not, then the focus will return to the page and control
of the first missing value.
The progress of the processing may be viewed by selecting
the Progress
window that appears once synthetic schlieren has started. The contents of this
window are updated periodically during the processing of each of the images
from the Experiment
stream. Most of the time, this window provides information on the apparent
vertical shift of the texture mask. The title bar on this window and the
‘thread message’ panel on the main status bar provide details of the individual
calculations as they are performed.
The basic processing algorithm may be summarised by the
following steps:
1
Determine optimal pixel shift.
à Determine optimal pixel shift by moving interrogation window around on Experiment image,
measuring the difference between this and the comparable unshifted window on
the Background
image.
à For each optimal pixel shift, use a bi-quadratic least squares to
obtain subpixel resolution.
à Repeat for each grid point on this level.
à Refine grid to next level by bi-linear interpolation, in a multi-grid-like
process.
2
Determine optimal subpixel shift.
à Determine optimal shift in a manner analogous to the pixel shift, but
using an interpolated version of the Experiment image to allow smaller shifts
to be probed.
à For each optimal subpixel shift, use a bi-quadratic least squares to
obtain an improved estimate of the optimal shift.
3
Determine optimal distorted shift.
à Use the current estimates of the apparent displacement to distort the Experiment image back
to the Background
image (i.e. try to undo the apparent movements).
à Repeat the optimal subpixel shift process, using this distorted image.
à The optimal shift from this process should be small (it represents the
error in the previous optimal shift) is used to correct the optimal subpixel
shift
4
Repeat steps 3 the required number of times, each
with a smaller subpixel shift of the Experiment image.
5
Repeat steps 2 and 3, but shifting the Backround image
rather than the Experiment
image.
à The optimal shift that is produced by this reverse shift is
inverted and itself distorted to shift it back to the Background frame of
reference.
6
The forwards and distorted reverse shifts are
combined to produce the ultimate optimal subpixel shift.
7
The shift is transformed to world coordinates.
8
The world coordinate shift is transformed into
gradients in the density perturbation.
9
The density perturbation is computed by integrating
the gradient field.
à The direct integration method used does not require boundary
conditions, and the arbitrary constant of integration is defined so that the
mean perturbation vanishes.
During the processing, DigiFlow will display a Progress
window that provides feedback on the performance of the pattern matching
algorithm. One of the key components of this is the classification of
displacement vectors by drawing boxes at their roots if there is some potential
problem. The table below lists these classifications and gives a description of
the various categories and an indication of the control that can affect this.
|
Symbol
|
Description
|
Advanced Control page
|
|
Red cross
|
No valid displacement vector
|
|
|
Blue box
|
The image does not contain an adequate texture for the
matching to be reliable.
|
Advanced:
Min range
Advanced:
Min texture
|
|
Magenta box
|
The difference function being minimised does not have a
well-defined peak.
|
Advanced:
Min curvature
|
|
Yellow box
|
The value of the difference function is too large.
|
Advanced:
Reject difference
|
|
Light red
|
The best match is found beyond the limit of the permissible
shifts.
|
Inputs:
Displacements
|
|
Dark green box
|
The optimal match produced an outlier. This has been replaced
by an interpolated value.
|
Advanced:
Outliers
|
|
Green box
|
Vector is the result of interpolation from surrounding
vectors.
|
|
|
Light magenta
|
A best match could not be found.
|
Inputs:
Displacements: Max x and Max y
|
5.6.5 Particles
Processing of particles is split between this submenu, which
includes particle streaks (§5.6.5.1) and Particle
Image Velocimetry (§5.6.5.2), and the Particle
Tracking submenu (§5.6.6).
5.6.5.1 Show as Streaks
Toolbutton:
Shortcut:
Related commands: process Analyse_ShowAsStreaks(..)
The Show as Streaks option provides a convenient method of
reviewing and presenting image sequences containing particles. Such sequences
will often be subsequently analysed in more detail using either Particle
Tracking Velocimetry (PTV) or Particle Image Velocimetry (PIV). However, it is
normally worth reviewing the sequence first as streaks as this will often give
significant insight into the structure of the flow, regions where things are
steady, and where the flow is unsteady, and where the contrast is adequate to
proceed with quantitative measurements.
Two dialog boxes are produced as standard during the Show as
Streaks process. The first (see figure 95) allows
selection of the input data stream in the standard manner. Under most
circumstances there will be no need to use Sift to change the timings, as this can
be done subsequently. However, the exception to this is when dealing with image
sequences that are interleaved so that images at different levels in a flow
(for example) are stored adjacently and only every nth
image is at the same level. In this case it may be desirable to set the time
step using Sift.

Figure 95:
Dialog box used to specify the input stream for the Show as Streaks facility.
The main control dialog (see figure 96)
consists of standard video controls, track bar and speed control. This dialog
sits alongside a floating window containing the processed streaks image. Note
that you may swap between these with the mouse to pan the image around, if
desired. Note that both windows are floating (i.e. they are not required
to remain within the main DigiFlow window).

Figure 96:
Dialog controlling the Show as Streaks facility.
The Processing
group determines how the displayed image is to be constructed from the raw
image stream. Direct
simply shows the raw image, Threshold
segments the raw image into a binary image prior to combining with a stored
image (the Threshold
group determining the intensity level for this split), Maximum intensity will take the greater
of the intensity in the current image and the corresponding pixel in the stored
image, Minimum intensity
will take the smaller of the intensity in the current image and the
corresponding pixel in the stored image, and Average will generate the streaks using
a simple arithmetic averaging process. In all cases (except for Direct) the intensity
of the stored image is reduced by the amount specified by the Decay group each time
a new image is added, thus providing a fading memory of the flow. The Reset button clears
the stored image, thus resetting the streaks.
Which processing option produces the best results depends in
part on the quality of the original images. For clean images with uniform
illumination and good contrast, Threshold
is likely to produce the best results. However, if the images have strong
variations in illumination, such as shown in figure 97,
the Maximum intensity
option produces more satisfactory results.
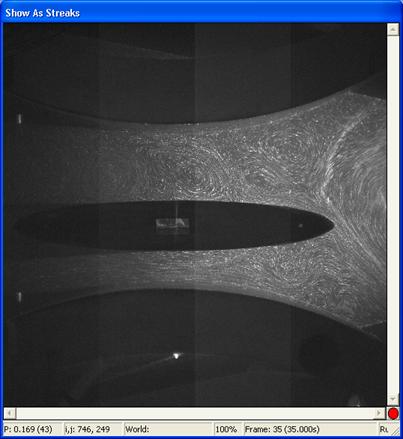
Figure 97:
Example image from streaks facility. Here the field of view was 2.5´2.5m and particles illuminated by a 5W argon
laser. The streaks show barotropic vortices interacting with the baroclinic
hydraulic exchange through a strait containing an island.
The Synchronise
display check box forces synchronisation such that each and every
frame in the sequence is displayed, even if this slows the update rate below
the desired frame rate. If Synchronise
display is cleared and the computer cannot keep up with the
desired frame rate, then frames are skipped to maintain that frame rate. In
most cases streak images work best if frames are not skipped (i.e. you
should normally have Synchronise
display checked).
5.6.5.2 Particle Image Velocimetry
Toolbutton:
Shortcut:
Related commands: process Analyse_PIV(..)
Theory
The Particle Image Velocimetry (PIV) component of DigiFlow
has a great deal in common with the pattern matching synthetic schlieren
component (§5.6.4.3), and indeed many of the unique
features in the PIV system owe their development to synthetic schlieren.
The PIV interface is divided into a number tabbed dialogs.
The first two, Inputs
and Outputs are
mandatory and control what is to be processed, and where the results are to be
stored, respectively. The remaining tabs may be used by experienced users to
tweak the process to yield better performance in some situations. Only the
first two tabs are available under Free DigiFlow licences.
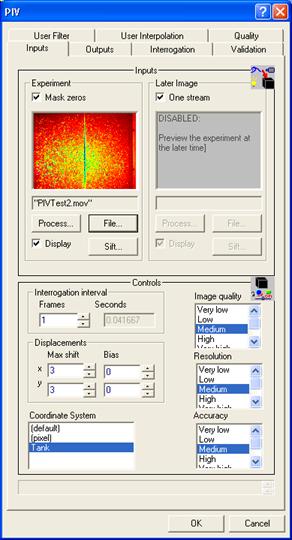
Figure 98: The Inputs tab of
the PIV dialog.
Intputs page
The standard PIV process takes two input streams. The first,
specified by the Experiment
group, is the video sequence of the experiment itself. As normal, an image
selector is used to specify the stream. This selector may be specified from a
file by clicking the File
button, in which case the standard Open Image dialog box is produced.
Alternatively, clicking the Process
button will allow a source process to be used (refer to §6 on chaining processes for further details).
The second stream, the Earlier Image input, may be tied to the Experiment stream by
the One stream
check box, or taken from an independent data source. In either case the
interval between these two streams should be specified in the Interrogation interval
group. If One stream
is used, then Interrogation
interval is specified in frames. If separate image streams are
used, then the Interrogation
interval is specified as the time interval between the two
streams.
The Mask
zeros check box causes DigiFlow to ignore all pixels with an
identically zero intensity. This feature is designed to allow simple masking of
images. Such masking may be used to remove parts of the field of view that do
not contain the flow. For example, it could be a static boundary to the flow, a
free surface, or possibly an object moving through the flow. In each case
external processing of the image sequence should be made to apply the mask
prior to starting the PIV processing.
There are four groups of controls on the Inputs tab. The first controls maximum
displacement that will be searched for. The values x Max shift and y Max shift are specified in pixels and
are assumed symmetric about zero. These values relate to the maximum expected particle
displacement but need to be as large as that shift (they parameterise the
initial search space for the particle displacement, but DigiFlow will search a
larger space if necessary). In most circumstances the default 3 pixels is
adequate. Note that the computation required to determine the displacement (and
hence velocities) increases approximately as the product of these two values,
hence specifying excessively large values is counterproductive.
If the velocity field has a significant bias in one
direction (e.g. there is a mean flow), then specifying a nonzero x Bias and/or y Bias will allow
greater computational efficiency by permitting smaller values for x Max shift and y Max shift. The
units of x Bias
and y Bias are
pixel displacements and have an effect similar to shifting the second image by
negative the specified amount. For example, if there is a mean velocity down
and to the right, then you would specify x Bias as positive and y Bias as negative.
To provide a simplified interface to the internal workings
of the PIV algorithm, DigiFlow provides a range of predefined settings that
have the effect of producing different resolutions and accuracies. The Image quality, Resolution and Accuracy list boxes
both have six possible settings: Very low, Low,
Medium, High, Very high and Best. The choice will
depend on a combination of the intended purpose of the results, and the time
available to undertake the processing, and the quality of the original images.
The fastest processing is achieved at the Very low end of both scales, while the
most detailed and accurate measurements are obtained with both Resolution and Accuracy set to Best. In the latter
case, even with relatively basic analogue video equipment, the accuracy with
which the particle displacement may be detected can be better than 1/100 of a
pixel in ideal circumstances (e.g. no particles disappearing), and the
spatial resolution of the measurements is a few pixels. By default, the Image quality, Resolution and Accuracy controls
will be enabled. However, if the Automatic check box for the Validation group on the Advanced tab is
cleared, then Image quality
is disabled. Similarly, the Interrogation
window group on the Advanced tab is cleared, then the Resolution and Accuracy controls will be disabled.
The final input on this tab is Coordinate System. This specifies the
coordinate system that will be used to relate pixel to world coordinates. The
coordinate system is assumed to have been defined in the mid-plane of the
experiment. See §5.2.6 for further details on setting
up a coordinate system. Note that if you select a pixel coordinate system, then
the To World Coordinates tool (§5.7.6) may be used
to retrospectively convert the pixel PIV results to a world coordinate system.
(It is generally better, however, to compute the PIV using the appropriate
world coordinate system in the first instance.)
Outputs page
The Outputs
tab controls the destination and scale of the output from the PIV calculation.
This dialog page consists of two image selectors, each with its own Colour and File buttons. The
destination for the output stream is selected by clicking the File button (thus starting
the standard Open Image dialog box), while the colour scheme to be used with
the stream is (optionally) selected with the Colour button. At least one of the four
output streams must be given a file name before OK will close the dialog box and start
the process.
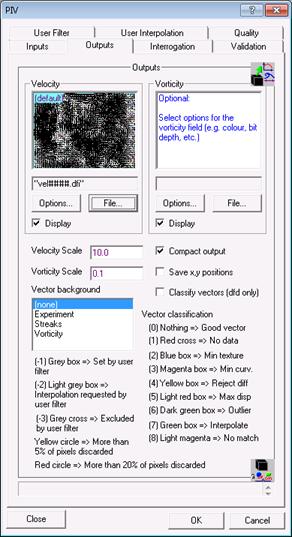
Figure 100: The Outputs tab of the PIV dialog.
The mandatory Velocity output selector will contain an image of the
velocity field calculated. It is recommended that you specify either a DigiFlow
Drawing file (.dfd)
or a DigiFlow Image file (.dfi)
rather than an industry standard raster image format for this output. In
general, a .dfi
file is to be preferred. In a .dfd
the velocity data as ASCII data in conjunction with a series of drawing
commands. This format is very convenient if you are using other software to
process the results as reading these files is straight forward. They are,
however, not very compact. Using a .dfi file stores the velocity data as velocity data, but
allows this to be processed by DigiFlow as though it were an image. For
example, the time average facility (see §5.6.1.1)
and most of the other manipulation tools can be used to process the velocity
data. In general, saving the data in .dfi format will be preferable until you have finished
all processing.
The scale length of the velocity arrows is determined by the
Velocity scale
setting. A unit value draws the arrows of a length equal to the distance the
particles have moved in the time interval between the two images used in the
PIV calculation. Increasing Velocity
scale causes the length of the velocity to increase, etc.
This approach allows Velocity
scale to be largely independent of the coordinate system used.
For many flows, a value of 2 to 10 is appropriate. Note that if Velocity scale is
negative, then the arrows are drawn in the reverse direction.
The background to the velocity field may be selected through
the Vector background
control. Selecting (none)
gives a plane white background for the velocity field map, and the output
stream stores only the velocity field itself. When Vorticity is selected for the Vector background,
then the vorticity field is calculated and stored in the output stream; the
vorticity field is also displayed as a colour map behind the velocity field.
The Experiment
and Streaks
options place an image of the experiment behind the velocity field (also
storing it in the output stream). The Experiment option is self-explanatory,
while the Streaks
option synthesises a streak image (see §5.6.5.1 for
an example of a streak image) to be displayed.
Selecting the Compact check box causes DigiFlow to save an
approximation to the calculated velocity field by only saving the gradient at
the nominal location of the interrogation windows used to calculate the gradient.
DigiFlow will automatically expand out this approximate velocity field, when it
is reloaded, to produce one that is very close to that saved without the Compact option. The
files produced, however, are much smaller. This option works well with either no
background, or using the vorticity field as a background. However, as the
background is compressed in the same way as the velocity field, this option
does not work so well when selecting either the experiment or particle streaks
as the background.
The Save
x,y positions is not normally necessary. This will add two data
planes to each .dfi
output by the PIV process, with one plane containing the x
coordinate of every pixel, and the other the corresponding y
coordinate. Note that the Quality
output (see the discussion below on the Quality tab) also provides access to the
location of each of the interrogation vectors.
If Classify
vectors is checked, then the velocity vectors produced include an
indication of the quality of the vector. This is indicated by a box or cross
drawn at the base of any suspect vector, as per the table below. Note that the Progress window
(which is always produced to show the progress of the PIV calculation) will
also show this information, even if Classify vectors is turned off. At present,
classification will only be indicated on output to .dfd files.
|
Symbol
|
Description
|
Advanced Control page
|
|
Red cross
|
No valid velocity vector
|
|
|
Blue box
|
The image does not contain an adequate texture for the
matching to be reliable.
|
Interrogation:
Min range
Interrogation:
Min texture
|
|
Magenta box
|
The difference function being minimised does not have a
well-defined peak.
|
Interrogation:
Min curvature
|
|
Yellow box
|
The value of the difference function is too large.
|
Validation:
Reject difference
|
|
Light red
|
The best match is found beyond the limit of the permissible
shifts.
|
Inputs:
Displacements
|
|
Dark green box
|
The optimal match produced an outlier. This has been replaced
by an interpolated value.
|
Validation:
Outliers
|
|
Green box
|
Vector is the result of interpolation from surrounding
vectors.
|
|
|
Light magenta box
|
A best match could not be found.
|
|
|
Yellow circle
|
At least 5% of pixels discarded
|
Interrogation:
Big differences
|
|
Red circle
|
At least 20% of pixels discarded
|
Interrogation:
Big differences
|
The vector field may be superimposed on a range of
backgrounds. These are selected by the Vector background list box. If (none) is specified,
then a plain, white background is used, whereas Experiment leads to the vectors being
superimposed on the corresponding experimental image. Similarly Vorticity draws the
arrows on an image of the vorticity field.
The Vorticity
output selector is optional, and should normally specify a raster image format
file. The Scale
setting controls the rendering of the vorticity as a colour map. The value
specified here will be taken as the saturation limit of the false colour map
produced. Thus decreasing Scale
amplifies the vorticity map. Note that this scale is used to determine the
scaling of the vorticity map behind the velocity vectors if Vorticity is specified for Vector background,
regardless of whether a separate vorticity output file is being created. Since
vorticity has dimensions of inverse time (and so does not have a length scale),
the scaling of vorticity is largely independent of the coordinate system
selected.
Note that outputting the velocity field to a .dfi file works best
when the coordinate system is essentially aligned with the image. In all cases
the velocities are determined on a regular grid in pixel space. When output to
a .dfd file, the
velocity vectors will be displayed in world coordinates with a standard
Cartesian grid in physical space; this may mean that the original pixel
coordinates are no longer Cartesian. When output to a .dfi file, the original pixel coordinates
remain Cartesian, and the world system may remain distorted.
Interrogation page
The Interrogation tab is identical to that for synthetic
schlieren described in §5.6.4.3. Most users will
not need to disable the automatic settings on any of the controls.
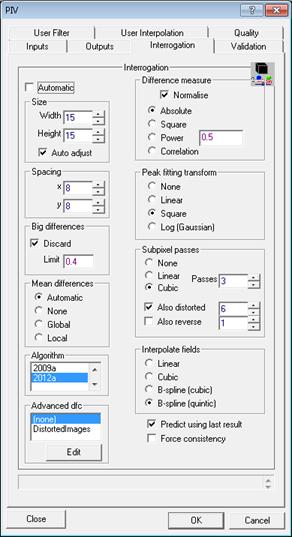
Figure 103: The Interrogation
tab of the PIV dialog.
A unique feature of DigiFlow, available only on fully
licensed copies, is the ability to use dfc macro code to fine tune various
aspects of the pattern matching process. The Advanced dfc group controls the
specification of this code. To provide code, select the required category from
the drop-down list then click Edit.
This will start up a dfcConsole
(see §5.2.10 for details) to edit the code.
The precise requirements for the dfc code vary depending on the task
required of it. In all cases, information is passed to the code through
specific variables. The code can then change the contents of the variables, but
must not redefine their type or location. Consequently, assignment to one of
the arrays passed to the code should be through specified elements (e.g.
A[1,2] := …;) or ranges (e.g.
A[:,:] := …;) and not
directly to the name (i.e. not A := …;). Some example codes for specific
purposes are given below.
The easiest way to determine what variables are available in
a given code segment is to include a call to view_variables(..) while developing the code. Note,
however, that the memory space and variables names are shared by all
code segments. Thus, a variable defined by the user in one section of code will
be available to other sections of code.
To suppress a given piece of code, either ensure that it is
blank or have
as the first line. This will suppress execution of the
code. Having quit
as the first statement (without the ‘Do not use’ comment) start the code
executing, but stop it again immediately. While this approach works, there is
an added computational overhead to it.
The following variables are passed to the code for the
different calls:
|
For any code
|
|
|
callFor
|
String
|
Identifies the purpose of the call. See below for specific
calls.
|
|
|
invokedBy
|
String
|
Specifies the condition under which the call is made.
|
|
|
dlg
|
Compound
|
The dialog structure used to define the PIV process
|
|
|
A
|
nx´ny array
|
The image (undistorted) of the flow at the earlier time
|
|
|
B
|
nx´ny array
|
The nx´ny image (undistorted) of the flow at
the later time
|
|
|
hA
|
Handle
|
Handle for the window showing the flow at the earlier time
|
|
|
hB
|
Handle
|
Handle for the window showing the flow at the later time
|
|
|
Time
|
Compound
|
Contains time information relating to the earlier time
|
|
|
nx
|
Integer
|
The width of the image stream being processed
|
|
|
ny
|
Integer
|
The height of the image stream being processed
|
|
|
X
|
nx´ny array
|
World x
coordinate for each pixel
|
|
|
Y
|
nx´ny array
|
World y
coordinate for each pixel
|
|
|
xMin
|
Real
|
The minimum world coordinate in the x direction (real)
|
|
|
xMax
|
Real
|
The maximum world coordinate in the x direction (real)
|
|
|
yMin
|
Real
|
The minimum world coordinate in the y direction (real)
|
|
|
yMax
|
Real
|
The maximum world coordinate in the y direction (real)
|
|
|
u
|
nx´ny array
|
Current estimate of the displacement in x direction
|
|
|
v
|
nx´ny array
|
Current estimate of the displacement in y direction
|
|
|
nxZ
|
Integer
|
The number of interrogation regions horizontally the image
|
|
|
nyZ
|
Integer
|
The number of interrogation regions vertically in the image
|
|
|
xyCentre
|
nxZ´nyZ array
|
The centres, in world coordinates, of each interrogation
region
|
|
|
ijCentre
|
nxZ´nyZ array
|
The centres, in pixel coordinates, of each interrogation region
|
|
|
iteration
|
Integer
|
Counter for iterative processes; -1 if not an
iterative process
|
|
callFor = “GetImages” – all algorithms
|
|
callFor = “PredictDisplacement” – 2014a and later algorithms
|
|
callFor = "InterpolateDisplacement" – all algorithms
|
|
|
invokedBy
|
String
|
One of "Forward",
"Reverse",
"Distorted",
"FinalOutliers",
"FinalField"
|
|
|
uInterrog
|
nxZ´nyZ array
|
Stores the x component of the current
displacement on the coarse grid.
|
|
|
vInterrog
|
nxZ´nyZ array
|
Stores the y component of the current
displacement on the coarse grid.
|
|
|
uField
|
nx´ny array
|
Stores the interpolated x component
of the current displacement at the full image resolution..
|
|
|
vField
|
nx´ny array
|
Stores the interpolated y component
of the current displacement at the full image resolution..
|
|
|
rect
|
Compound
|
The rectangle within U,V to which u,v must be interpolated.
|
|
callFor = “DistortionField” – 2017a and later algorithms
|
|
|
xDisp
|
nxZ´nyZ array
|
The x-component of the current
estimate of the displacement field.
|
|
|
yDisp
|
nxZ´nyZ array
|
The y-component of the current
estimate of the displacement field.
|
|
|
xDist
|
nxZ´nyZ array
|
The x-component of the displacement
field used to distort the images during a distortion pass. On entry, this
will be the same as xDisp.
Typically, this hook is used to filter this distortion field.
|
|
|
yDist
|
nxZ´nyZ array
|
The y-component of the displacement
field used to distort the images during a distortion pass. On entry, this
will be the same as yDisp.
Typically, this hook is used to filter this distortionfield.
|
|
|
xZSize
|
Integer
|
The horizontal size of the interrogation window used for
pattern matchine the distorted image.
|
|
|
yZSize
|
Integer
|
The horizontal size of the interrogation window used for
pattern matchine the distorted image.
|
|
|
nMicrosteps
|
Integer
|
The distortion process is achieved by an advection equation.
This specifies the number of intermediate steps used.
|
|
|
weightUnfilteredDisplacement
|
Real
|
The weighting applied to the current estimate of the
displacement (xDisp)
compared with the displacement field used to distort the image (xDist).
|
|
|
scaleDisort
|
Real
|
The weighting to be applied to disorting the image. A value of
1.0 will try to distort the images using the current estimate of the
displacement so that they match.
|
|
|
relaxation
|
Real
|
The correction determined with the distortion pass is applied
with a relaxation factor.
|
|
callFor = "DifferenceFilter" – 2014a and later
algorithms
|
|
|
angle
|
nx´ny array
|
The angle for the major axis to be applied to the difference
filter
|
|
|
ellipt
|
nx´ny array
|
The ellipticity to be applied to the difference filter
|
|
callFor = “DistortedImages” – 2012a and later algorithms
|
|
|
P
|
nx´ny array
|
The distorted image at the earlier time
|
|
|
Q
|
nx´ny array
|
The distorted image at the later time
|
GetImages – all algorithms
This code segment is called immediately after the pair
of images is read in. One possible use of this code is to pre-process the
images to apply a mask, either a static one or one created dynamically based on
the contents of the images. Typically, it will be more efficient to develop the
processing algorithm outside the pattern matching process as debugging it in
context is less straight forwards. (A mask is generally implemented by setting
to zero the pixels that are not to be included in the pattern matching
process.)
As an example, the following code was developed to remove
the (relatively faint) images of fixed bubbles behind the illuminated PIV
plane.
if (Time.iNow = 0) {
# This setup is only executed once
#
# Recover the region selected for
processing
i0 :=
dlg.Experiment_Region.xMin;
i1 :=
dlg.Experiment_Region.xMax;
j0 :=
dlg.Experiment_Region.yMin;
j1 :=
dlg.Experiment_Region.yMax;
# Read in the 'background' image,
created by determining the minimum
# intensity over time for each pixel in
the image
back := read_image("MinIntensity.dfi");
back :=
back[i0:i1,j0:j1];
# Create a mask highlighting the bubbles
thresh := 0.015;
noBubbles := filter_median(back,11,11);
mask :=
back - noBubbles > thresh;
mask := filter_median(mask,3,3);
};
# Fix the two
input images by removing the bubbles
A -= back;
B -= back;
A[] := where(mask
and A < 2*thresh,0,A) + 1/255;
B[] := where(mask
and B < 2*thresh,0,B) + 1/255;
Iin this case, the file MinIntensity.dfi was calculated in
advance using Analyse:
TimeAverage with Method
set to Min.
PredictDisplacement – 2014a and later algorithms
At the start of the processing of each new pair of
frames, DigiFlow requires an initial guess for the displacement field. By
default, this is determined by a pixel-resolution pass for the first velocity
field, whereas for subsequent fields it is determined either by the
displacement from the previous calculation, or by another subpixel pass. The
code specified to PredictDispalcement
is called after any pixel resolution pass has been complete.
The current displacement field estimate is provided in u[:,:] and v[:,:]. Note that
any assignment statements should be made to u[:,:] and v[:,:] rather than simply to u and v to ensure the
same memory is used.
An example of where this facility is useful is given in the
following example. Here, the file MeanVelocity.dfi contains the mean velocity that is to be
used in place of a ‘zero’ prediction for the velocity field for the first
iteration. In most cases, it is unlikely that the mean velocity is a less good
prediction than the previous velocity, unless the successive velocity fields
departure from this mean are poorly or negatively correlated.
#
Use pre-existing velocity field to make prediction
if (Time.iNow = 0) {
predFile := "MeanVelocity.dfi";
predUV := read_image(predFile);
predDet := read_image_details(predFile);
view_variables();
# Convert world
velocities to pixel displacements
u[] := predUV[:,:,0] * predDet.tStep/predDet.dx;
v[] := predUV[:,:,1] * predDet.tStep/predDet.dy;
};
Note that the displacement is specified over the
entirety of the image plane, not just at the centres of the interrogation
windows.
InterpolateDisplacement – all algorithms
This code segment is called immediately after DigiFlow
has interpolated a displacement field from the resolution of the interrogation
grid (uInterrog,vInterrog)
up to the resolution of the image being processed (uField,vField). The default
interpolation scheme is set by the Interpolate Fields group on the Interrogation tab and acts to
interpolate the two displacement components separately.
Displacement fields are interpolated at multiple different
points in the pattern matching algorithm. These are distinguished by the invokedBy
string. Both "Forward", "Reverse" are used when doing reverse passes, "Distorted" indicates a distorted pass (with iteration giving
the distorted pass number), "FinalOutliers"
is during the removal of any remaining outliers,
"FinalField"
indicates generation of the final displacement field.
DistortionField – 2017a and later algorithms
During the ‘distorted passes’, DigiFlow uses the
current estimate of the velocity field to distort both the images being used
for PIV to its best estimate of the state at the mid-point in time between the
two. The DistortionField
code segment is called before DigiFlow produces the distorted pair of images,
but after it has determined the displacement field that will be used to drive
the distortion. The code segment can be used to modify this distortion field.
Typical examples might include filtering the distortion field to try to ensure
the image distortion is smooth.
The following code segment is motivated by a desire to use a
fine spacing of the interrogation windows in cases where the particle seeding
density and image quality may not be as high as desired. Here, a low pass
filtering of the distortion field will help suppress high-wavenumber noise
being introduced.
#
Variables on entry
#
xDist,yDist The default distortion field
#
iteration The iteration counter
#
Time The current time information
xDist[] := filter_low_pass(xDist,3,3);
yDist[] := filter_low_pass(yDist,3,3);
DifferenceFilter – 2014a and later algorithms
With algorithms dated 2014a and later, a spatially
tapered elliptical filter is applied when calculating the difference measure between
the distorted images. The idea of this is to provide a greater emphasis for one
set of directions compared with others.
By default, the major axis of the elliptical filter is
aligned with the current estimate of the velocity, while the degree of ellipticity
is controlled by (¶u/¶y)2 + (¶v/¶x)2. The sample
code below simply displays the orientation and ellipticity fields.
if (Time.iNow = 0 and iteration = 0) {
# Create view handles
for diagnostics on first call
hAngle := view(angle,-pi,pi);
view_colour(hAngle,"circular");
view_title(hAngle,"Difference Filter:
Angle");
hEllipticity := view(ellipt,0,5);
view_title(hEllipticity,"Difference Filter:
Ellipticity");
};
view(hAngle,angle,-pi,pi);
view(hEllipticity,ellipt,0,5);
DistortedImages – 2012a and later algorithms
During the ‘distorted passes’, DigiFlow uses the
current estimate of the velocity field to distort both the images being used
for PIV to its best estimate of the state at the mid-point in time between the
two. The DistortedImages
code segment is called immediately after DigiFlow produces the distorted pair
of images and before it starts the pattern matching process on the distorted
pair. The DistortedImages
code can therefore be used to modify the distorted pair, or to provide diagnostic
information about them.
The following code segment is motivated by the observation
that for very small particles in sharp focus can change substantially in
overall intensity from one frame to the next. This change can be due to the
fill factor for the image sensor being less than 100%, or due to particles near
the fringe of the light sheet moving in or out of the region of strong
illumination. In either case, it can be desirable to decrease the impact of
these extreme changes without completely eliminating the information provided
by the particle. This process is one of fine-tuning, and should not be used
until the velocity field is very close to being correct and so the distorted
images are nearly perfectly matched. The modification made here to the images
is to maintain the structure, but decrease the intensity difference in regions
where this difference is very strong.
#
Variables on entry
#
P,Q The distorted images
#
iteration The iteration counter
#
Time The current time information
dPQ := P - Q; # Difference between
distorted images
if (Time.iNow = 0 and iteration = 0) {
# Create view handles
for diagnostics on first call
hScat := 0;
hDist := 0;
hDist := view(hDist,dPQ,-0.2,0.2); # Display unedited difference
view_zoom(hDist,0.25);
view_fit_to_zoom(hDist);
view_title(hDist,"Difference between
distorted images");
};
view(hDist,dPQ,-0.2,0.2); # Display unedited difference
#
A scatter plot (optional) can provide good diagnostic information
scatter := scatter_to_array(make_array(0,256,256),255*P,255*Q,1,1);
scatter := log(scatter max
1e-2) + 2;
scatter /= max_value(scatter);
hScat := view(hScat,scatter);
view_title(hScat,"Scatter plot of
intensities in distorted images");
if (iteration >=2) {
# Only make adjustments
to distorted images if sufficient
# distorted passes have
already been completed
OK := P <> 0 and Q <> 0; # Mask out any zeros
thresh := mean(abs(dPQ));
sPQ := P + Q;
delta := sign(dPQ)*(thresh + (abs(dPQ)-thresh)/4);
P[] := where(abs(dPQ) > thresh and OK,(sPQ+delta)/2,P);
Q[] := where(abs(dPQ) > thresh and OK,(sPQ-delta)/2,Q);
# Update difference
image as diagnostic
# Could also update
scatter plot
dPQ := P - Q;
view(hDist,dPQ,-0.2,0.2);
};
Note that the code assigns new values to the distorted
images P[:,:] and Q[:,:], rather than
simply to P
and Q. This
ensures that the same memory is used for the updated arrays as was used to pass
them to the code. There are both computational reasons for wanting to do this
and it ensures the returned arrays have the same dimensions as the input ones.
Validation page
The Interrogation tab is nearly identical to that for
synthetic schlieren described in §5.6.4.3. Most
users will not need to disable the automatic settings on any of the controls.
One difference is that the Projection
group contains an additional option, allowing projection of the velocity field
onto either irrotational or incompressible (solenoidal) spaces. The latter is
most likely to be of use when considering two-dimensional flows, as it only
attempts to make the divergence in-plane measured velocity field vanish. In
most other circumstances the projection should be turned off.
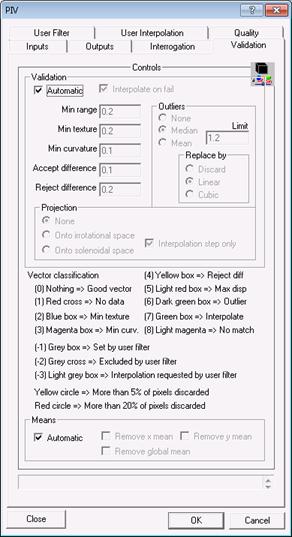
Figure 106: The Validation
tab of the PIV dialog.
User filter
The User
Filter tab provides the user with the ability to supplement or
override DigiFlow’s normal validation filters. When enabled DigiFlow provides
the user’s dfc
code with the two images as the variables Pa and Pb, along with the pixel displacements
as the two-dimensional arrays u and v. The locations of these vectors are supplied in x and y, while the
current state of the vector is indicated by state. Finally, the string calltype
indicates the point in the algorithm when the call to the filter is made. This
may take one of the values "Pixel",
"SubPixel",
"Reverse",
"Distorted"
or "Final".
The values taken by the state
array reflect DigiFlow’s default assessment of the individual displacement
vectors. A list of the categories is given in the lower half of the User filter tab.
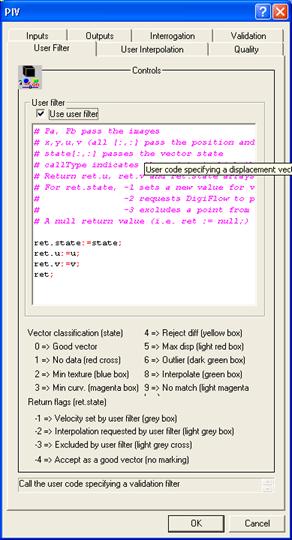
Figure 110: The User Filter tab.
The user code should return a compound variable containing
the components .state,
.u and .v, each of
which are arrays of the same size as the corresponding arrays provided to the dfc code. The return
values in .state
request DigiFlow to treat the displacement vector in the manner specified in
the lower half of the User
filter tab. If .state for a given vector is set to -1 then the
vector supplied .u
and .v will
be used in place of that calculated by DigiFlow.
User interpolation
The User
interpolation tab provides a way of customising one of the key
steps in the pattern matching algorithm, namely interpolating the velocity
field from the location of the interrogation vectors to the entire image plane.
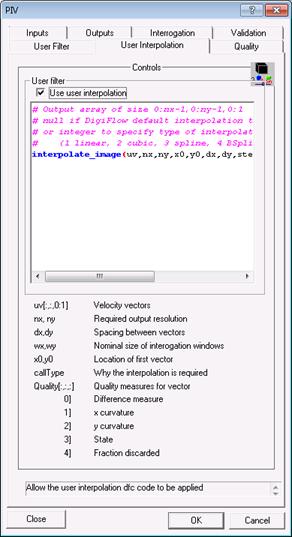
Figure 111:
The User interpolation tab provides a way of
customising the interpolation step whereby the velocities at the interrogation
points are interpolated to the entire image plane.
The controls available on this tab are identical to those
for the pattern matching in synthetic schlieren (see §5.6.4.3).
The example given in figure 111 uses a biquadratic fitted using a least-squares
routine for all parts of the PIV process where interpolation is required. Note
that this process only gives approximate interpolation as the least squares
solution will not generally pass through the corresponding mesh points.
Substituting the following code will keep the default behaviour for all except
the generation of the intermediate velocity field used to distort the images:
if (callType = "Distorted") {
sx := x_size(uv);
sy := y_size(uv);
fit_image_b_spline(uv,nx,ny,x0,y0,dx,dy,nxParts:=sx/2,
nyParts:=sy/2,xOrder:=3,yOrder:=3);
} else {
null;
};
Here, we detect when the interpolated field is required
for image distortion using the callType variable. If not, then returning a null
indicates to DigiFlow to use the default interpolation. Here, when callType is "Distorted",
we use a least squares fit of the velocity field using cubic b-splines to
reconstruct a smoothed high-resolution version of the velocity field with which
to distort the images prior to the next stage in the pattern matching
algorithm.
Quality output
The Quality
tab provides the option of outputting information that DigiFlow generates to
assess the quality of the individual velocity vectors.
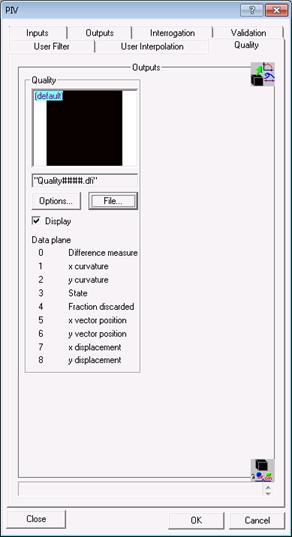
Figure 112:
Optional output of information relating to the quality of the velocity vectors.
The optional output stream created by this feature must be
saved as a .dfi
file. The pseudo image created contains multiple planes of image data, as
indicated in the dialog box. Note that unlike with a .dfi file containing velocity
information, DigiFlow does not format the image in any particular way for
display. Opening a quality .dfi
file will simply display the first image plane. The contents of the quality
image is identical to that for Synthetic Schliere, thus the reader is referred
to §5.6.4.3 for further details.
Post processing
Selection of the most appropriate output file format
(between .dfd
and .dfi)
depends on the type of post processing to be undertaken.
If the .dfi
format is selected, then the PIV velocity files may be fed back into DigiFlow
as multi-plane images containing the velocity field. These can be processed
using most of the standard DigiFlow tools, preserving the nature of their
contents. For example, the Analyse:
Time Average facility can act upon a sequence of PIV velocity
files to produce the time average velocity field. Similarly, the various other
time series tools described in §5.6.1 can operate
on these images, as can the general manipulation tools Recipe, Transform Intensity and Combine Images (see
§§5.7.1, 5.7.2 and 5.7.3). There are standard recipes in the Recipe facility to
aid with basic manipulations of this data. For example, the recipe Velocity.Background.Divergence
recipe lets you change the background of the velocity field from the one saved
during the PIV processing to display the in-plane divergence field. Similarly,
there are recipes for vorticity, stream function, velocity potential, shear, etc.
Note that for PIV data, velocity gradients are obtained by a finite difference
operation of the velocity field.
Saving the output in .dfd format is appropriate if post
processing is to be undertaken using a third party or user-written program as
the .dfd file
contains an ASCII representation of the velocity field. Note that you can always
convert a .dfi
file into a .dfd
file using Edit Stream
(§5.1.6) or one of the other related image
manipulation tools by simply specifying a .dfd file for the output.
Stereo PIV
A single PIV calculation will provide two velocity
components parallel to the image plane. However, if there are a pair of
simultaneous recordings of the image plan from somewhat different angles, then
these can be used as a stereo pair to recover three velocity components in the
image plane. The documentation here is not intended to provide a full
description of how to achieve this, but rather to act as a pointer to the
separate document, DigiFlow_StereoPIV.pdf
(and DigiFlow_StereoPIV.htm)
that provides further information on this specialist procedure.
There are a number of key steps in obtaining the
three-component two-dimensional (3C2D) velocity field:
1. Capture of a synchronous stereo pair of images of the flow
2. Processing, in pixel coordinates, of the two apparently two-dimensional
velocity fields (one from each of the stereo pair).
3. Determination of the two-dimensional (in-plane) coordinate system for
each of the images in the pair.
4. Determination of the stereo-pair to three-dimensional coordinate system
and its derivative (used for transforming the velocities)
5. Utilisation of the coordinate systems to transform the stereo pair of
velocity fields into the 3C2D velocity field in world coordinates in the image
plane.
At present, steps 3, 4 and 5 are handled through macros
utilising a tailor-made set of built-in dfc functions for improved efficiency.
5.6.6
Particle Tracking Velocimetry
5.6.6.1 Tracking particles
Toolbutton:
Shortcut:
Related commands: process Analyse_PTVTrack(..)
Background
Particle Tracking Velocimetry (PTV) differs from Particle
Image Velocimetry (PIV) in a fundamental way. Whereas PIV (described in §5.6.5.2) relies on pattern matching in an essentially
Eulerian way, PTV seeks to identify individual particles (or other equivalent
features) and follow them in a Lagrangian sense. As PIV is the more widely used
of these techniques, it is worth discussing the relative merits of the two
approaches.
The strengths of PIV are that is fairly robust to noise and
has excellent velocity resolution (the accuracy with which displacements may be
obtained is a function of the cell size and the distribution of features within
it rather than the pixel resolution). The spatial resolution is inversely
proportional to the cell size: the overall data quality is thus a compromise between
velocity and spatial resolution. The main disadvantages are the considerable
time required to compute the optimal correlation and the inability to cope with
any structure across the illuminated plane (i.e. velocity gradients
parallel to the viewing direction). In general the method does not allow
individual particles to be tracked, and hence has no immediate access to
Lagrangian descriptions. However, it is a relatively simple matter to add some
degree of particle tracing once the velocity field is known, and hence access
the Lagrangian nature of the flow.
Particle tracking offers a more fundamental approach to PIV.
There are two main approaches which are exactly equivalent to the manual
methods of analysing streak (or multiple exposure) photographs and multiple
(time series) photographs. In the streak photograph method, the effective
camera shutter is opened for a long time during which the particles move many
particle diameters. This long exposure may be produced directly with a suitably
slow shutter speed, or synthesised by combining multiple exposures (e.g.
ORing a sequence of video frames using a digital frame grabber with a shutter
speed equal to the field rate - the DigiFlow facility described in §5.6.5.1 has this as an option). Once the streaks have
been produced, image processing techniques may be applied to locate them and
analyse their shape, orientation etc.
The alternative of utilising a time series of images offers
a greater volume of information on the particle positions as a function of
time, especially in the context of digital image processing where quantisation
yields a relatively low spatial and intensity resolution. Knowing the
approximate location of a particle at a relatively large number of times
enables a much more accurate estimation of the position of a particle at a
given time, and of its velocity, provided the sampling frequency is much higher
than the highest frequency in the particle motion. To make use of this
information some method must be developed for tracking particles from one image
to the next. In the limit of particles moving only a small fraction of their
diameter between each sample, the process of matching particles in one image
with their position in the next image is straight forward - the particle images
closest together in two adjacent samples will correspond to the same physical
particle. However, if the particles may move many diameters between samples,
more sophisticated algorithms must be employed.
The algorithm used in the matching process may utilise
spatial and temporal information in addition to particle characteristics and
prior knowledge of the flow. Generally, only some of these features will be
needed to determine which particle image is which particle. For example, if
spatial correlation is not utilised, then two-dimensional projections of
three-dimensional flows with significant velocity gradients parallel to the
direction of viewing, may be analysed (recall that PIV techniques are unable to
cope with such images). Moreover, the basic approach is not limited to a
two-dimensional projection of a three-dimensional flow but is capable of full
three-dimensional analysis. By applying the matching process repeatedly,
time-series for individual particles may be obtained to describe some of the
Lagrangian nature of the flow.
The accuracy with which the velocities may be measured is
limited by the accuracy with which the individual particle images may be
located and the time period over which the velocity may reasonably be evaluated
(this must be shorter than the period corresponding to the maximum frequency in
which you are interested). The accuracy of location depends in turn on the
particle size, the bit depth and quality of the images, and the method used to
determine their positions. In general, the velocity resolution will be less
than that for the cross-correlation approach, but is nevertheless excellent in
many situations. The spatial resolution is limited primarily by the number of
particles in the flow: the more particles, the higher the resolution. In
practice the resolution of video technology and the frame grabber imposes the
most stringent limitation on the number of particles able to be tracked.
Eulerian as well as Lagrangian descriptions may be obtained, utilising a
suitable interpolation method, if the particle seeding density is sufficiently
high.
The techniques and algorithms used by DigiFlow are based on
those originally developed in 1988 and described by Dalziel (1992). These same
techniques and algorithms were incorporated in the DigImage processing system.
These algorithms have been refined and enhanced in DigiFlow to improve
computational efficiency and, more crucially, to improve the overall
performance of the particle tracking process. The interface with these
algorithms has been greatly simplified when compared with DigImage, making the
tracking process more generally accessible.
This section outlines and describes the two-dimensional
particle tracking technique utilised by DigiFlow. This method represents an
efficient, reliable approach to tracking particles from a two-dimensional
projection of a flow. The computation required to analyse each frame pair
increases only slightly faster than linearly with the number of particles,
allowing very high processing rates.
Particle location
The basic strategy behind the particle location is to scan
through the image for blobs that have an intensity satisfying some
threshold requirement. If a blob is found, then its characteristics are
determined and compared against a set of requirements for the blob to be
considered a particle. If the blob satisfies these requirements, it is recorded
as a particle, if it does not, it is discarded.
By scanning through the image with a range of different
thresholds, it is possible to pick up particles with a broad range of
intensities, allowing optimal performance. A blob that was rejected at one
threshold may well be picked up as a particle at another threshold.
The particle location procedure ultimately records not only
the location of the particle (as determined by its volume centroid, relative to
the threshold, but also a broad range of other particle characteristics, some
of which are used in the subsequent matching process.
Matching algorithm
Once all the particles in an image have been
found (at t = tn+1,
say), they need to be related back to the previous image (t = tn, say) to determine which particle image is which
physical particle. In DigiFlow we use a modification of what is known in operations
research as the Transportation Algorithm. This approach was that developed by Dalziel (1992). While
the problem solved by the transportation algorithm may be represented as a 0-1
totally unimodular integer linear program, it is more efficient and
illuminating to take a graph theory approach.
The idea is to choose a set of associations between two sets
of entities, such that the set of associations is optimal in the sense that it
minimises some linear function of the associations it includes. For the
particle tracking, one of the sets is the set of particles P at t = tn and the other the set of particles Q at t = tn+1. We shall start by assigning a label to
all the particles images in the two images. At t = tn the particle images are labelled pi for i=1 to i=M,
while at t = tn+1 they
are labelled qj for j=1 to j=N.
Each pi or qj contains not only the
location of the particle, but other characteristics such as size, shape,
intensity, and any other desired piece of information. We now define a set of
association variables aij.
If aij is equal to
one, then we will say that pi at t = tn is produced by the same particle as qj at t = tn+1. If aij is zero, then pi and qj represent different physical particles.
For the time being we shall assume that there is one and
only one physical particle for each of the particle images. We shall consider
groups of particles later in this discussion. For the present it is obvious
that, for given pi,
at most only one value of j can give aij equal to one,
otherwise the physical particle must be two places at once! Identical arguments
apply for each pj.
If M is equal to N, it
may be possible for there to be exactly M = N
values of aij
equal to one. However, this will seldom happen in real experiments, where there
will normally be fewer than M = N values
of aij equal to one.
Moreover, the number of particles images at the two times will not always be
equal.
There are many reasons why the number of particles in the
image may be different at t = tn and t = tn+1. The simplest is that the particle may have
moved outside the region of the flow being tracked, either by moving outside
the bounds of the tracking region, or by moving out of
the illuminated region (e.g. moving out of a sheet of light). To
overcome this problem we define a0j and ai0 as dummy particles at times t = tn and t = tn+1. Unlike ordinary particles, more than one
value of j or i may give a
nonzero value of a0j or ai0 (respectively).
In this case a nonzero value of ai0 indicates
that particle pi at t = tn has been
lost from the image by t = tn+1, either
by moving out of the image or for some other reason. Similarly, a0j = 1 represents a particle qj present at t = tn+1 which
was not there at t = tn.
In order to determine the optimal set of nonzero aij, we must first define
the functional to be optimised. The only restriction this method puts on the
functional is that it is linear in the associations, aij, and so may be represented by Z,
the sum over i and j of
aijcij. Elements of cij represent the cost
of associating particle pi at t = tn with particle qj at t = tn+1. The
optimal solution will be chosen to minimise the objective function Z.
Typically the costs cij will be specified
using some function of the particle positions, particle characteristics,
temporal history and the physics of the flow. Conceptually the simplest model
is to set cij equal
to the separation between particle pi and particle qj (c0j and ci0 may be set to the distance to the boundaries
of the observed region, or the maximum allowable distance a particle may be
allowed to travel between tn
and tn+1). The optimal solution will then try to
minimise the particle displacements, allowing only associations which do not
exceed the cost limits placed by c0j and ci0. The costs cij could equally as easily be the squares of the
displacements, yielding a type of least squares optimal solution.
If we are trying to measure the fluid velocity (rather than Brownian
motion, say), then a more appropriate set of cost functions would include some
fluid dynamics. This may be achieved at the most basic level by predicting the
positions the particles at t = tn will have at t = tn+1 using
their velocity (and possibly acceleration) at t = tn. The costs cij may then be some function of the separation
between the predicted position of pi and the position of qj. If a particle at t = tn has only just entered the image, then we are
unlikely to have more than a rough estimate for its velocity and so are unable
to predict accurately where it might be at t = tn+1. To
enable matchings to still occur to such particles, we must reduce the costs of
associations with them and allow matchings over larger distances than for
particles for which we have a velocity history
(we may also, however, add some fixed cost for this new member). While the
cost reduction – and associated increase in the allowable separations—when
there is no velocity history may produce some mismatching, the requirement for
a much more exact match would not then be satisfied at t = tn+2, and so
the mismatch would not continue. During subsequent analysis, if we accept only
paths which passed through three or more samples during the tracking phase,
then we will eliminate any mismatches due to the less stringent matching
requirement for a particle with no velocity history.
Additional factors such as the particle size, intensity,
shape or even colour may easily be brought into the costing function. Every
added component in a well-chosen functional will increase the probability of a
correct matching, but at the expense of increased computation. Fortunately,
provided the particle seeding density is not too dense, the extra criteria are
unlikely to add significantly to the quality of the results. Experience has
shown that the tracking results are relatively insensitive to the exact
function used for the costs cij. Any mismatches which arise due to a short
coming in the costing procedure will be short lived (they will fail to match on
the next step) and may be trapped during the subsequent analysis phase through
acceleration checks.
The basic cost in DigiFlow is given by
 , (23)
, (23)
where F(pi) is a fee determined by previous history of pi. The summation is over
a list of properties f determined by the location
process. These properties include location, threshold (intensity) and size, but
in some cases a broader range can be used.
For each particle property there is a unit cost wf(pi),
a threshold tf and a
cost function zf(pi,qj). The cost function zf(pi,qj) depends on the
instantaneous properties of the particles pi and qj, whereas the unit cost wf(pi) may depend on
whether or not the history of pi is known. A typical example of zf(pi,qj) is that for the
particle’s location,
 , (24)
, (24)
where xi and ui are the particle location and velocity at t = tn, while xj is the
particle location at t = tn+1. The corresponding unit cost is
 , (25)
, (25)
where L1, L2 and L3 are the maximum matching distances for the
first, second and subsequent matches the particle pi may make. The cost of a change in threshold is
similar,
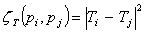 , (26)
, (26)
where Ti and Tj is the threshold identifying the particle at tn and tn+1,
respectively. Here the corresponding unit cost wT(pi) is divided into
only two costs depending on whether or not a particle has a history.
The fee F(pi) is typically taken as zero if the particle has a
valid velocity history, and positive if it does not (the ‘joining fee’). The
purpose of this fee is to promote the preferential matching of particles with a
valid velocity history. In contrast, m(pi) is reduced when there is no velocity history to allow
matches further a field.
This strategy to assigning costs has proven simple yet
flexible and provides a framework that is relatively easy to understand. This
model is more sophisticated than that used in DigImage in that particle
properties such as intensity and size play a more prominent role in DigiFlow.
Tests have shown that this provides a substantially improved matching
performance when there are very high particle number densities.
Particle tracking streams
The DigiFlow PTV facility takes an input stream, showing the
experiment, and produces an output stream that contains the particle locations,
particle properties, and the inter-frame particle associations.

Figure 113: The PTV
tab controlling the input and output streams.
The Input
stream may be in any valid image format. This is specified in the normal way
through clicking File
to specify the source if the stream is to be taken from a movie or sequence of
images. In such cases the stream may be trimmed for length, a subregion
selected, etc., using the Sift button (see §4.3). If
the image source is from an upstream process, then this should be specified
using the Process
button.
The Output
stream should be specified as a .dft
file. This special file format contains all the particle data and its
associations. These .dft
files may be viewed using the normal DigiFlow tools; in such cases, the
particle data is rendered back as an image. However, these files are really
intended for use with the other PTV tools within DigiFlow which can access
their contents directly.
The output stream is specified in the standard way through
the File
button. While Options
may be set, there is not generally any benefit to be gained from doing so.
The Progress
window group controls what is displayed as the particle tracking
proceeds. The information selected here can help assess the performance of the
particle tracking, and provide a guide to any adjustments to the Cost policy that may
be required. In all cases the velocity of matched particles will be displayed,
using white for particles that have been matched over three or more intervals
in time, yellow for particles matched over two intervals, and cyan for
particles matched only once. An example of the Progress window is shown in figure 114.
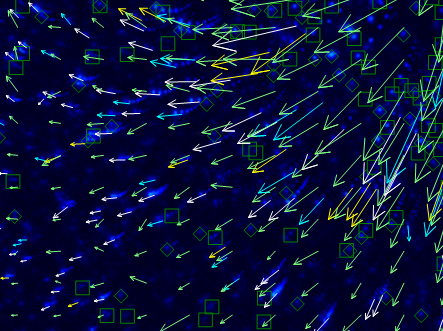
Figure 114: Enlarged
example of the Progress window for particle tracking
with all the optional output switched on and Streaks
selected as the backdrop. Here Vector scale is set to
4.0, so the arrows are four times the length of the actual displacements. The
white arrows are particles that have been matched more than two times, the
yellow arrows particles that have been matched twice and cyan arrows particles
that have been matched only once. Dark green squares are old particles that
have not been matched, with dark green circles showing their predicted
position. Dark green diamonds are new particles that have not been matched.
Dark magenta circles are the predicted positions of particles that were
matched, and light green arrows are the gridded velocity field.
If Show
unmatched old is checked then particles at the earlier time step
that are not matched to the later time step will be highlighted by a square box
drawn in dark green around them, and by a circle (also in dark green) at their
predicted location. Similarly, if Show unmatched new is checked, then any particles in the
later time step that were not matched will be highlighted by a diamond drawn in
dark green around them. (If the dark green diamond coincides with a dark green
circle then the corresponding particle was not matched due to its change in
intensity, area or one of the other image attributes.)
Checking Show
predictions for matched will cause dark magenta circles to be
drawn around the predicted position for particles that were matched. Any
difference between these circles and where the particle is actually located may
help diagnose why mismatches occur.
DigiFlow allows particles to go to ‘sleep’ for one frame but
for them to still be matched across this period of sleep. The Show sleeping matches
check box causes such matches to be shown in the Progress window..
At each time step DigiFlow calculates an approximate gridded
version of the velocity field. The primary use of this is as an estimate for
the velocity of particles with no prior history. By checking Show grid velocity
this grid will be displayed in the progress window in light green.
The initial size of the arrows for plotting the velocity is
set by Velocity scale.
A unit value causes the arrows to be drawn at the same length as the
displacements they represent.
The vector and particle information shown in the Progress window is
displayed on top of an image of the experiment. The Backdrop list selects exactly how this
image is constructed. Selecting Streaks
will use a decaying series of images superimposed to give an impression of the
particle motion, while Old
time and New
time will show one or the other of the two images being
processed.
The Image
spacing is shown here for information only. If the particle
tracking is to be undertaken on a sequence of images that do not contain time
information, then the default spacing will be 1.0 seconds. This spacing may be
changed, however, in the Sift
dialog (see §3.6).
Particle location policy
The location of particles is of central importance to the
performance of PTV. In DigiFlow, this process is controlled by the Location policy tab.

Figure 115:
Parameters controlling the PTV particle location policy.
Best results can be achieved from high quality images that
have bright, clear particles approximately two or three pixels in linear
dimensions, on a uniformly black background. Such experiments, however, can be
difficult to achieve in practice. The particle location strategy used in
DigiFlow builds on the experience with DigImage to provide a robust, accurate
and efficient method of getting the best possible results from the available
images.
DigiFlow provides a preview of the located particles to aid
the process of setting the various parameters. This preview is activated by
clicking the View
button. Placing the cursor over the preview will provide the normal feedback of
the intensity at the location of the cursor, while the  ,
,  and
and  buttons provide the ability to zoom in, zoom
out and resize the preview window. The preview window contains white plus (+) marks
indicating the particle locations superimposed on top of an image of the image
(see figure 116). Additionally, a subset of the
rejected ‘blobs’ are indicated by magenta boxes (blobs too big), yellow circles
(inappropriate particle shape, controlled by Maximum correlation and Maximum edge to area ratio)
and cyan diamonds (mismatch between area and volume centroids, controlled by Maximum mismatch).
The preview window is terminated by a second click of the View button. The location of the preview
image within the time series is determined by the Frame control.
buttons provide the ability to zoom in, zoom
out and resize the preview window. The preview window contains white plus (+) marks
indicating the particle locations superimposed on top of an image of the image
(see figure 116). Additionally, a subset of the
rejected ‘blobs’ are indicated by magenta boxes (blobs too big), yellow circles
(inappropriate particle shape, controlled by Maximum correlation and Maximum edge to area ratio)
and cyan diamonds (mismatch between area and volume centroids, controlled by Maximum mismatch).
The preview window is terminated by a second click of the View button. The location of the preview
image within the time series is determined by the Frame control.
Even if the preview is not generated the Number of particles box will show the
current estimate for the number of particles within the frame. This count is
updated automatically whenever one of the location control parameters is
changed. Note however, that if a control is changed while DigiFlow is still
processing the last lot of changes, then the count (and preview) may not
reflect the latest changes.
The best results can generally be obtained by directly
probing a high quality raw image stream. However, for inexperienced users or
less than ideal image streams, optimising the settings for this can be difficult.
For this reason, DigiFlow provides the possibility of preprocessing the images
to provide a more uniform and consistent structure to the images. This
preprocessing necessarily destroys some of the information contained within the
original images, but the algorithms are designed to keep this to a minimum.
The preprocessing is controlled through the Preprocess list box.
As noted above, the greatest accuracy can be achieved by selecting (none) to suppress
preprocessing, although for a given image stream this may not be appropriate. For
inexperienced users the min-max
filter option is recommended. This nonlinear filter attempts to
remove background variations on scales larger than the particles, thus
effectively resulting in the particles appearing on a uniform black background
for subsequent location. A different form of preprocessing is available by
selecting (background).
This activates the controls on the Background Illumination tab (see below) which allows an
image of the experimental setup without particles to be removed from the
experimental images.
The starting point when changing the locations parameters is
normally setting the range of intensities through which the threshold will be
scanned. This is achieved using the Threshold group. The location process begins by looking
for particles satisfying the threshold Maximum, gradually decreasing this in Number discrete steps
down to Minimum.
The Greater
check box will cause DigiFlow to search for bright particles on a dark
background, while clearing the check box sill invert the incoming image stream,
thus allowing it to be treated in the same way. The Quadratic check box controls the
distribution of thresholds between the two limits. For many experiments, having
Quadratic
checked works best.
Figure 116:
Preview window showing the particles that have been located.
The Blob
validation group provides the information necessary to decide
whether or not a given blob that has been located should be treated as a
particle. The left-hand column is pretty much self-explanatory. Blobs smaller
than Minimum area
will be ignored at a given threshold, but they may well be picked up as
particles at a later (lower) threshold. Blobs exceeding Maximum area will be discarded. The
reason for having limits on both linear dimensions and particle area is to help
ensure the particles are roughly circular and ensure that they may be located
with subpixel accuracy. The upper limits are provided to prevent spurious
features within the image from being picked up accidentally. The Maximum x size and Maximum y size not
only set the upper size limits, but also provides the length scale for the
filter that is used when the min-max
filter is selected for Preprocessing.
The mean intensity of a blob relative to the threshold at
which it is identified must exceed Minimum excess, which ensures the image is sufficiently
well defined. The location assigned by DigiFlow to a particle satisfying all
other criteria is the volume centroid, where the third dimension is the
intensity relative to the threshold. However, DigiFlow also calculates the area
centroid; the maximum difference between the locations of these two centroids
is determined by Maximum
mismatch.
Other aspects of the geometry are tested using Maximum correlation,
which is the correlation coefficient of the pixels within the blob. In general
a value close to 1 or -1 indicates that the blob is linear rather than circular
in nature. Similarly, Maximum
edge to area ratio compares the square of the number of pixels
marking the boundary of the blob with the number within the blob. A large value
for this ratio indicates either linear blobs or blobs with very convoluted
boundaries. As an indication, a large, circular blob would have this ratio
equal to (2pr)2/(pr2) = 4p, a square would have a ratio of 16, while a line of length
L and a single pixel wide would have the ratio equal
to 4L. The default value
is somewhat higher than this to allow a broader range of particles to be
tracked.
The Reset
button will restore all of these parameters to their default values.
In addition to providing a preview of the particles found,
the View button
also provides a plot of the size distribution of the particles identified.

Figure 117:
Histogram showing particle number and area for given categories of particles
identified by the Locaion policy.
Background illumination
The controls on the Background illumination tab are enabled
by selecting (background)
in the Preprocess
list on the Location policy
tab. The Background
illumination tab provides a convenient method of correcting your
experimental images for a non-uniform, non-zero background illumination in the
experimental images.
Typically all that is required is a single image. This can
be an image of the experimental setup with no particles present, or may be
constructed from the experimental setup itself. If the particles are brighter
than the background then a typical strategy for the latter is to work out the
minum intensity for each pixel using the min feature in Analyse: Time Average (see §5.6.1.1). The rationale behind this is that a given pixel
will be at its darkest when no particle is present. (If the particles are
darker than the background, then use max instead of min.)

Figure 118: The
Background intensity tab controls the removal of
background variations in the intensity.
When Image
is selected, the background image is specified as either a single image or as a
sequence of images; which is determined by the Sequence check box. In most situations a
sequence is unnecessary, but if there are moving parts, or significant
predictable changes in illumination, then a sequence may be desirable.
If Calculate
is specified, then a background illumination image is constructed from the
experimental input in the manner described above. Rather than using every image
in the input, it is frequently only necessary to use a subset of the images.
The nSamples
control specifies the maximum number of samples that should be used. These will
be evenly distributed over the duration of the experimental image sequence.
Note, this control shoul not be used when the experimental image sequence is
obtained from a process rather than a file. The background image generated in
this manner is not saved; moreover, it is not available until the particle
tracking process starts, and so it can be more difficult to set the particle
location parameters. For these reasons it will normally be more convenient to
manually construct the background image using Analyse: Time Average (see §5.6.1.1), should you need one.
Costing policy

Figure 119: Parameters
controlling the costing policy for particle tracking.
As noted earlier, the matching process is governed by the
cost assigned to each of the possible associations between the sets of
particles identified at different times. The Costing policy tab defines the various
factors that go into determining the cost. Each of the parameters is described
in turn below, followed by a brief guide on strategies for adjusting them,
should this prove necessary.
The most important parameters in most cases are those in the
Maximum matching distance
group. The three distances given here determine the maximum distance (in pixel
separation) between the predicted position of a particle and where one is
actually found. As any prediction of a particle without a history the First match value
should normally be larger than the other two. For flows with low accelerations
the Second match
and Later matches
should be similar or even the same. These maximum separations will be realised
only if the particles do not incur other costs in the Attribute costs group (see below). (For
users familiar with DigImage, the Later matches is similar to [;USPM Maximum matching distance] and First match is
similar to [;USM Max new
paths error] when expressed in pixels.)
The Other
costs group contains other costs that are used to modify the
matching process. The Joining
fee (range 0 to 1) is applied only to particles that do not have
a history. Increasing the Joining
fee does not affect the Maximum matching distance for the First match, but does
decrease the probability that an association with the particle will be
permitted.
The Attribute
costs group is used to increase the cost of an association if the
attributes of the particle images concerned differ. Two sets of values are
specified: one for the First
match, and a second for Later matches. In each case, no cost is
incurred if the attributes differ by less than Threshold.
The Threshold
change cost and Threshold,
and the Area change cost
and Threshold
work in a similar way to the distance cost, although the measure of the area
change is 2|Ai - Aj|/(Ei + Ej),
where Ai and Aj are the areas and Ei and Ej the number of edge points for the old and new
particles, respectively.
In most circumstances the default values (which can be
restored using the Reset
button) will work well. However, in some flows it might be necessary to adjust
things either to reduce the number of spurious matches, or to allow DigiFlow to
lock on to particles that are moving very rapidly.
Prediction policy
The prediction policy (see figure 120)
determines how velocity information is incorporated into the distance function (24). Velocity
weighting determines how much of the velocity from the last match
for a particle is used to predict its new position, and the Acceleration weighting does a similar
thing with the particle Lagrangian acceleration (when there is sufficient
history to evaluate this). This particle-based velocity is not the only
potential source of velocity information. DigiFlow also calculates a grid
velocity which is based on the average particle velocities within grid cells
covering the domain. The Grid
weighting determines how much of this is incorporated into the
prediction. In particular, if V is the velocity
weighting and G is the grid weighting, then for a
particle with a velocity history the velocity the velocity used in (24) is
ui = Vuin + (1-V)Gug, (27)
where uin is the
particle velocity from the previous time step and ug is the grid velocity. When there is no velocity
history then
ui = Gug. (28)

Figure 120: The
controls for the prediction policy.
The above strategy for determining the velocity may not be
appropriate if the mean velocity is significantly different from zero. In this
case we may enable use
formula and specify (in pixel units) a background velocity field
using u Formula
and v Formula.
The resultant prediction is then given by
ui = Vuin + (1-V)(Gug + (1-G)uf), (29)
when there is a history, and
ui = Gug + (1-G)uf (30)
when there is not. The u Formula and v Formula are specified in terms of its
location x,
y (in
pixels) and the time t.
A typical example of the use of this function would be for flow in a flume,
where the two formulae would simply represent the mean flow.
When there is insufficient particle information to evaluate
the grid velocity at a given point, DigiFlow will a memory of the last
calculated grid at that point. This memory fades in a manner determined by Grid memory. If Use formula when no history
is not set, then the grid velocity will decay towards zero by taking the
product of Grid memory
and the current grid at each time step.
In some cases it may be desirable to feed in the predicted
velocity from a sequence of .dfi
files. These may, for example, be the result of a previous attempt at PIV or
PTV (using the PTV Grid velocity feature of §5.6.6.5).
Such a two-stage process can help DigiFlow latch on to particles in problematic
regions of high gradients or in high-speed flows. Note that once DigiFlow has
latched on to the particles they will be treated in much the same way as
normal. This feature is enabled via the Use velocity file checkbox. The supplied
velocity information may be a single .dfi describing a steady mean flow (in which case clear
the Sequence
check box), or it may be a time-varying sequence. Note that in both cases it is
essential that the velocity information is provided for the same region as the
tracking and that the same time spacing is used. It is also normally best if
the velocity information is provided in pixel coordinates. The Weighting control
within the Predict with
velocity file determines the relative importance of the supplied
velocity file and the normal gridded velocity, described above.
Image sequences of high-speed flows sometimes consist of
repeated short bursts of images where the image spacing within the burst is
shorter than that between bursts. PIV often uses this technique with two
closely spaced images in each burst. The Reset paths group is implemented to aid
the tracking of sequences containing bursts of images with a different time
interval between the bursts than between the images within the burst. For most
cases, Periodic reset
should be unchecked, meaning that the spacing between all images are the same
and that matches should be made over each image pair in turn. Checking Periodic reset will
force all paths to be broken (i.e. no matches allowed) at intervals
specified by Interval
(in frames). Not only will the paths be discarded, but also the gridded
velocity field will be discarded. Thus, effectively, the particle tracking will
start again from scratch. Note that utilising a Periodic reset on a flow that has a
continuous record will degrade the results from the particle tracking.
Moreover, the smaller the Interval,
the poorer any velocity calculations will be. (It will also be necessary to
ensure that the time used to calculate the velocity does not exceed the period
of data between each reset.) For the case of PIV sequences with two images in
each burst, then set Interval
to two.
The default values may be restored using the Reset button.
Tracking
During the tracking process, DigiFlow will display three
windows. The Experiment
will display the raw experimental image being processed, while the Particles image will
display each of the identified particles as a dot. The colour of each dot is
related to the threshold at which the blob in the experimental image was
considered to be a particle.
Perhaps the most useful window is the Progress window. This window displays a
variety of information about both the velocity field and the performance of the
tracking process. Details of the different arrows and symbols used was given
earlier in this section, with an example shown in figure 114.
Statistics of the number of particles matched are also given in the title bar
of the window.
Occasionally an obviously incorrect vector will be produced.
If such a vector is yellow, then it is of little concern: the matching criteria
for particles without a velocity history are necessarily less stringent, a
feature that is likely to lead to the occasional mismatch. Such vectors are
unlikely to persist, however, as the implied velocity history is much less
likely to lead to a match on the next step.
There will be times, however, when spurious vectors persist.
The table below lists potential problems and remedies.
|
Description
|
Remedy
|
|
Very few particles have vectors
|
Check that location policy is reliably picking up particles on
successive frames.
|
|
|
If the intensity of the particles is fluctuating a lot, try
reducing the Cost
of a Threshold change,
or increasing the Threshold
before a cost is incurred. This problem is most likely to occur when the
particles are extremely small.
|
|
|
If the particles are moving relatively far and fast between
frames, try increasing the Maximum
matching distance group.
|
|
Spurious white vectors persist.
|
DigiFlow may be identifying too many particles, some of which
are really just noise. Check the Location policy.
|
|
|
Check that matches are not being made too readily. Try
reducing Maximum matching
distance group.
|
|
|
Try increasing the Cost or reducing the Threshold for Threshold changes.
|
Calculating particle velocity
Once the tracking has been completed, it is often desirable
to calculate the particle velocities. The velocities may be calculated from a
particle path in a number of ways. At the simplest level, the location of
particle i on two consecutive frames, xi(n-1)
and xi(n), can be used to estimate the velocity as
ui(n-½) =(xi(n) - xi(n-1))/Dt,
where Dt is the spacing between two frames. Although this approach
provides the highest possible frequency response, it is also the most subject
to noise. If the error in the positions of the particle is sx, then the error in the velocity is su = 2sx/Dt.
The simplest way of decreasing the error is to perform the calculation over a
larger interval. If
ui(n-s/2) =(xi(n) - xi(n-s))/(sDt),
then the error is reduced to su = 2sx/sDt, provided
the velocity is constant within the interval.
For most purposes it is better to decrease the interval
between frames (decrease Dt) and then use a least squares fit to a sequence of s particle positions. The simplest alternative is to fit a
line. Since the frame interval is constant, the estimate of the velocity is
therefore
 . (31)
. (31)
This velocity is then assigned to the least squares
estimate of the particle’s position in the middle of the time interval. Key to
the use of the least squares approach is its effect on the error in the
velocity estimate. As shown by Dalziel (1992), the error estimate is reduced to
 .
.
Increasing s leads to a reduction
in the error estimate for the velocity, but only provided the velocity remains
approximately constant over the interval sDt.
Increasing s and decreasing Dt can achieve
this, although there will normally be limits imposed by the camera frame rate
that limits s. However, the interval sDt may be increased further if the model for the particle
path remains reasonable; fitting a quadratic rather than linear function can
achieve this.
Post processing
In addition to the post-processing features described in the
following sections, DigiFlow provides a dfc macro interface to access the .dft particle tracking
data. The following segment of code illustrates some of the core functions.
This code is intended for a scenario when there are only a small number of
particles. It produces a scatter plot of the vertical velocity against the
vertical position of the particles.
# Determine the
tracking file
file :=
"PTV####.dft";
file :=
ask_string("Name
of .dft files (including hashes)?",file);
# Get basic details
of the file
det :=
read_image_details(file);
# Rather than
utilising a coordinate system, use a known one-to-one
# relationship
between the pixel size and the size of the imaged region
# Here a 1:1
magnification is being used
pMax :=
5.0; #
Maximum expected velocity in pixels/s
pixSize:=
7.4; #
micrometres
wMax :=
pMax*pixSize;
zMax :=
pixSize*(det.ny-1);
# Create the drawing
for the scatter plot
hD :=
draw_start();
draw_set_axes(hD,0,wMax,0,zMax);
draw_x_axis(hD,"$w
(\mu$m$s^{-1})$");
draw_y_axis(hD,"$z
(\mu$m)");
draw_colour_scheme(hD,"single
cycle - half brightness");
draw_mark_size(hD,1);
draw_font(hD,0.5);
# Make font smaller for the size labels
# Open the ptv data
to reconstruct the paths
hP :=
ptv_open(file,coordSystem:="(pixel)");
# Returns handle of window showing PTV input
for
fNow:=det.fFirst to
det.fLast {
#
Calculate the velocities using least squares over five frames
ptv :=
ptv_velocity(fNow,5);
#
Also read the information for the particles at this time
part :=
ptv_read_particles(file,fNow);
#
ptv and part will be null if there is no data
if
(is_array(ptv))
{
#
Scan through the list of particles
for
k:=0 to
y_size(ptv)-1
{
id :=
int(ptv[4,k]);
# The unique track number for this particle
#
Select colour and mark style based on track number
iCol :=
0.9*(int(id/9)
mod 16);
iStyle :=
id mod 9;
draw_line_colour(hD,iCol);
draw_text_colour(hD,iCol);
draw_mark_type(hD,2+iStyle);
x :=
ptv[3,k]*pixSize;
y :=
ptv[1,k]*pixSize;
draw_mark(hD,x,y);
#
Find info for this particle
this :=
ptv_particle_details(part,id);
if
(fNow =
this.startFrame+3)
{
#
Write details on third occurrence
area :=
this.area*pixSize^2;
dia :=
2*sqrt(area/pi);
draw_text(hD,x,y,"$
d ="+nice_number_string(dia)+"\mu$m");
};
};
};
};
# Tidy up the access
to the PTV data
ptv_close();
close_view(hP);
# Remove window showing PTV input
# Show the plot
hV :=
view(hD);
# Returns window handle
view_title(hV,"Vertical
velocity scatter plot");
oFile :=
ask_string("Name
to save plot to (blank to suppress)?","wScatter.dfd");
if
(is_null(oFile))
{
}
elseif (length(oFile)
> 0)
{
write_image(oFile,hD);
};
# Tidy up
draw_destroy(hD);
# Free drawing memory
A key feature of this code is the use of the unique particle
id assigned to each particle track to relate the velocity information provided
by ptv_velocity(..) (the first
index of the returned array set to 4) to extract further details from the .dft tracking file. In
particular, ptv_read_particles(..) is used to
determine all the particle information at a given time, and then ptv_particle_details(..) is used to
extract the details for a specific track. Here we calculate the effective
particle diameter from the area returned for the particle.
Further details of the individual functions can be found by
accessing the dfc
help system. See §5.2.10 and §5.9.2 for details.
Toolbutton:
Shortcut:
Related commands: process PTVBasicStatistics(..), ptv_open(..), ptv_close(..), ptv_tracks(..), ptv_velocity(..)
Basic velocity statistics for the particles are available
through this feature. The statistics are weighted by the number of particles,
rather than the region of space in which particles were found.
The controlling dialog takes the normal form with the .dft tracking data
being specified in the PTV
data input stream. The Basic Statistics output takes the form of a single .dfd (or .emf or .wmf) output
plot.
The particle tracking process is undertaken in pixel space.
However the results will generally be required in world coordinates. In
DigiFlow the transformation between the two is made during the analysis stage
by selecting the appropriate Coordinate
system.
The method of calculating the velocity, and the number of
time intervals across which the calculation is made, is determined by the Velocity group.
Typically a value of 4
or more should
be used for the Length
entry in conjunction with the Linear
or Quadratic
methods. It is recommended that the Extremes option only be used for testing purposes as this
provides the least accurate approach.
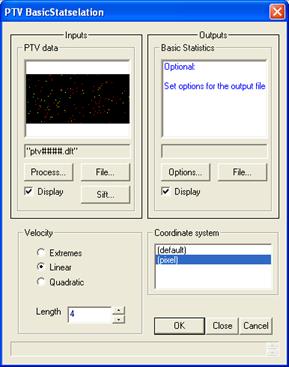
Figure 121: Dialog
controlling the calculation of basic PTV statistics.
5.6.6.3 PTV autocorrelation
Toolbutton:
Shortcut:
Related commands: process PTVAutocorrelation(..), ptv_open(..), ptv_close(..), ptv_tracks(..), ptv_velocity(..)
Since particle tracking is an inherently Lagrangian process,
it makes sense to analyse the particle tracks in a Lagrangian framework. The
Lagrangian autocorrelation functions are one such way. Particle velocities are
calculated for each point along a path using the methods outlined in §5.6.6.5 and then related to the velocity at another time
along the same particle path to generate the autocorrelation coefficient
 ,
,
where the summation is over the N
particles paths at least dt
long occurring at any time t in a specified interval.
Here the indices i and j
refer to the velocity components u or v.
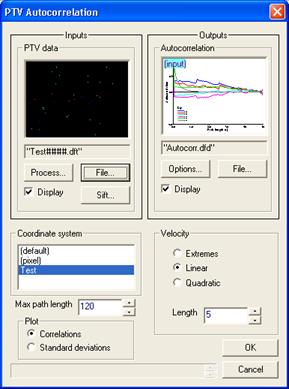
Figure 122: Control
of the autocorrelation facility.
The PTV
data input selector takes a series of .dft particle tracking files and
extracts the data from them. The start and end points, and the spacing of
output, can be set by the Sift
button (see §4.3).
Output of the Autocorrelation is in the form of a .dfd drawing file, an .emf file, or a .wmf file. If you want access to the
actual track data, then the .dfd
option is preferred.
The particle tracking process is undertaken in pixel space.
However the results will generally be required in world coordinates. In
DigiFlow the transformation between the two is made during the analysis stage
by selecting the appropriate Coordinate
system.
The method of calculating the velocity, and the number of
time intervals across which the calculation is made, is determined by the Velocity group.
Typically a value of 4
or more should
be used for the Length
entry in conjunction with the Linear
or Quadratic
methods. It is recommended that the Extremes option only be used for testing purposes as this
provides the least accurate approach.
The autocorrelation function will be calculated for all
separations dt up to the
maximum specified by Max path
length, although the calculation will proceed only as far as
particle paths of that length are still found.
Normally the results of this calculation will be the
autocorrelation functions, selected by Correlations in the Plot group. However, it can be valuable
to determine the standard deviations (velocity fluctuations) of the data as the
conditional sampling associated with the very long particle paths can lead to a
bias in the statistics. Select Standard
deviations to see this data.
5.6.6.4 PTV vectors
Toolbutton:
Shortcut:
Related commands: process Analyse_PTVVectors(..), ptv_open(..), ptv_close(..), ptv_tracks(..), ptv_velocity(..)
Particle tracking data begins as Lagrangian particle paths.
Typically these are randomly distributed in space and variable length in time.
The .dft file
potentially contains particles that exist for only a single frame, and others
that are part of paths spanning many frames. The PTV vectors facility provides the
ability to review the contents of the .dft file, filtering out the paths that are too short.
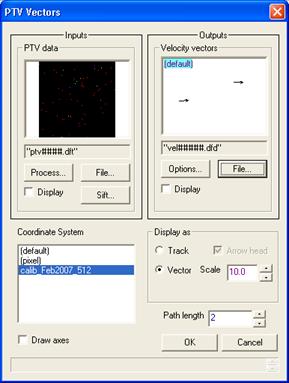
Figure 123: Dialog
controlling the production of particle tracking vectors.
The PTV
data input selector takes a series of .dft particle tracking files and
extracts the data from them. The start and end points, and the spacing of
output, can be set by the Sift
button (see §4.3).
Output of the Velocity vectors or particle tracks is in the form of a .dfd drawing file, or
a .wmf or .emf file. If you want
access to the actual track data, then the .dfd option is preferred as this will
contain all the paths individually listed. The Draw axes check box determines whether
the drawing includes axes or only the vectors/tracks. Note that specification
of an output stream is optional. If not specified, the output will be displayed
on the screen while it is computed, but will be discarded at the end of the
processing.
The particle tracking process is undertaken in pixel space.
However the results will generally be required in world coordinates. In
DigiFlow the transformation between the two is made during the analysis stage by
selecting the appropriate Coordinate
system.
The output can contain either velocity vectors (select Vector) or the
particle tracks (select Track)
at each time, where the vectors/tracks are determined only for particles that
extend for at least Path length
intervals in time (half before and half after the current time). When Track is selected,
the Arrow head
check box determines whether or not an arrow head is draw; arrow heads are
always drawn when Vector
is selected.
5.6.6.5 PTV grid velocity
Toolbutton:
Shortcut:
Related commands: process PTVGridVelocity(..), ptv_open(..), ptv_close(..), ptv_tracks(..), ptv_velocity(..)
Mapping particle velocities to grid
For some purposes, it is desirable to transfer the randomly
distributed particle paths, and their associated Lagrangian velocities, onto a
regular grid. The basic approach for doing this is using a weighting kernel to
distribute the particle velocities onto the grid. Suppose ui, i=0,1,…n-1 are the particle velocities known
at locations xi,
then we may estimate the velocity U at some
location X by
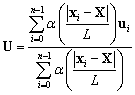 , (32)
, (32)
where a(|xi – X|) is the weighting function. We select a(r) to provide finite support over some length scale L. This approach was pioneered in DigImage.
By ensuring a(r)
and its derivatives are continuous, then we may use the same form to provide
velocity gradients by analytically differentiating the kernel. For example, ¶U/¶x is given by
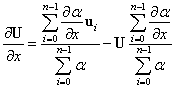 , (33)
, (33)
an approach that has had much use in the family of
numerical techniques known as Smoothed Particle Hydrodynamics (SPH, e.g.
Monaghan 1992) and offers substantially better performance than finite
difference on the gridded velocities. Following the work with SPH, we use the
axisymmetric cubic spline
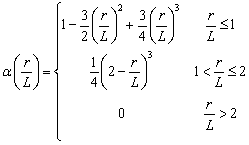 . (34)
. (34)
This is plotted in figure 124.
Figure 124: The
axisymmetric cubic spline used to distributed particle data to the grid.
Grid velocity dialog
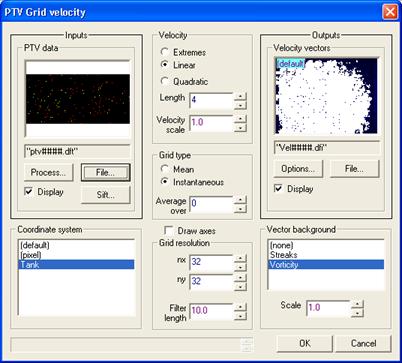
Figure 125: Dialog
controlling the process of gridding the particle tracking data.
The PTV
data input selector takes a series of .dft particle tracking files and
extracts the data from them. The start and end points, and the spacing of
output, can be set by the Sift
button (see §4.3).
Output of the Velocity vectors, and optional background image, is in
the form of a .dfd
drawing file, an .emf
file, a .wmf
file, or a .dfi
image file. If you want access to the actual track data, then the .dfd option is
preferred as this will contain all the paths individually listed. The Draw axes check box
determines whether the drawing includes axes. Using a .dfi file will allow the resulting
velocity fields to be manipulated by the various image processing tools
available within DigiFlow. Note that specification of an output stream is
optional. If not specified, the output will be displayed on the screen while it
is computed, but will be discarded at the end of the processing.
The particle tracking process is undertaken in pixel space.
However the results will generally be required in world coordinates. In
DigiFlow the transformation between the two is made during the analysis stage
by selecting the appropriate Coordinate
system.
The method of calculating the velocity, and the number of
time intervals across which the calculation is made, is determined by the Velocity group.
Typically a value of 4
or more should
be used for the Length
entry in conjunction with the Linear
or Quadratic
methods. It is recommended that the Extremes option only be used for testing purposes as this
provides the least accurate approach. The length scale of arrows used for the
velocity is determined by Velocity
Scale. A unit value will cause the arrows to represent the actual
distance moved between two consecutive frames.
The grid velocity can represent either the instantaneous
velocity field, or a temporal mean of the selected interval. The choice of
which is determined by the Grid
type group. With an Instantaneous grid, it is possible to employ a moving
average, either to filter out the higher frequency components, or (for a flow
that is steady in the Eulerian frame) to increase the available data for the
gridding process.
The resolution of the grid and length scale of the kernel
function are fixed by the Grid
resolution group. Decreasing the Filter length can lead to improved
spatial resolution, provided it remains sufficiently large to include an adequate
number of particles for each of the nx by ny
grid points.
The velocity field may be rendered by itself, or
superimposed upon a background image. This is controlled by the Vector background
list box in conjunction with a Scale
factor.
Post processing
Selection of the most appropriate output file format
(between .dfd
and .dfi)
depends on the type of post processing to be undertaken.
If the .dfi
format is selected, then the PTV gridded velocity files may be fed back into
DigiFlow as multi-plane images containing the velocity field. These can be
processed using most of the standard DigiFlow tools, preserving the nature of
their contents. For example, the Analyse: Time Average facility can act upon a sequence of
PTV gridded velocity files to produce the time average velocity field.
Similarly, the various other time series tools described in §5.6.1 can operate on these images, as can the general
manipulation tools Recipe,
Transform Intensity
and Combine Images
(see §§5.7.1, 5.7.2 and
5.7.3). There are standard recipes in the Recipe facility to
aid with basic manipulations of this data. For example, the recipe Velocity.Background.Divergence
recipe lets you change the background of the velocity field from the one saved
during the PTV gridding process to display the in-plane divergence field.
Similarly, there are recipes for vorticity, stream function, velocity
potential, shear, etc., and for adding scales and other similar
graphical manipulations. Note that for PTV data, velocity gradients are as part
of the gridding process by analytical differentiation of the weighting kernel
rather than by a finite difference operation of the velocity field. This
retains more of the velocity information available from the randomly
distributed particles.
Saving the output in .dfd format is appropriate if post
processing is to be undertaken using a third party or user-written program as
the .dfd file
contains an ASCII representation of the velocity field. Note that you can
always convert a .dfi
file into a .dfd
file using Edit Stream
(§5.1.6) or one of the other related image
manipulation tools by simply specifying a .dfd file for the output.
5.6.7 Optical flow
The idea behind Optical Flow is that illumination is a
conserved quantity that is advected by some velocity field.
5.6.7.1 Follow
Toolbutton:
Shortcut:
Related commands: process Analyse_FollowOpticalFlow;
follow_optical_flow(..).
This menu item provides a basic algorithm for extracting the
velocity field from an optical flow. The key idea is that if illumination is
conserved then we can write an advection equation for it of the form
 . (35)
. (35)
If we then assume that the velocity field (u,v) is constant over some
region S containing intensities P0, P1, … PN, then we may write this as the over determined
system
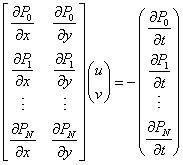 . (36)
. (36)
We can then estimate (u,v) as the least squares solution to (36). In reality, finite difference approximations to the
spatial and temporal gradients of the illumination are used, and the noise in
the signal, plus the need for the least squares problem to be well conditioned,
places a practical lower limit on the size of the region S,
while an upper limit is imposed by the velocity field not really being
constant.
This process, which is sometimes referred to as ‘feature
tracking’, can be used in a variety of contexts. With relatively slow flows
containing particles, it provides a computationally cheap method of obtaining
an estimate of the velocity field, although the resulting velocity field is
less accurate than that obtained by other methods. The process can be
particularly valuable for looking at the flow and distortion of dye fields,
although the user must be aware that it is not necessarily the fluid velocities
that will be returned.
Note, the Tools:
Recipes: Slave Process (§5.7.5)
facility provides a cut-down version of this facility for providing an
estimated velocity in real time. This cut-down version is provided through the dfc function follow_optical_flow(..).
Inputs
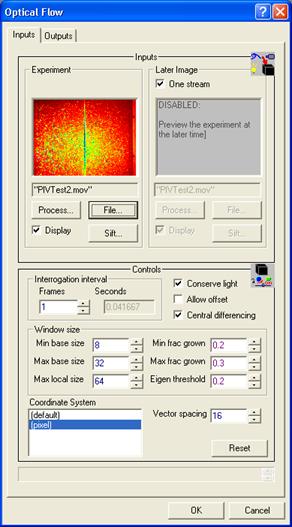
Figure 126:
The inputs tab for Follow Optical Flow.
The Inputs tab bears some similarity to that for PIV (see §5.6.5.2) with either one or two input streams. If One stream is chosen,
then the Interrogation
interval group allows the number of frames between the first and
second frame of each pair being processed. When the input is as two streams,
the interval between each stream must be specified in seconds.
The Conserve
light checkbox forces the mean intensity of each of the
interrogation windows (the region given by S above) to
be constant, Allow offset
enables the temporal derivatives to be made in a semi-Lagrangian manner, and Central differencing
makes the spatial derivatives a central second order approximation.
The Window
size group controls the size of the interrogation window, which
DigiFlow adjusts dynamically to give the best compromise between noise level,
robust data, and the resolution of velocity gradients. This automatic
adjustment is guided by minimum and maximum sizes for the base windows which
DigiFlow applies to all interrogation points. DigiFlow will cause a window to
increase above this base size, up to Max local size if the magnitude of the smallest
(normalised) eigenvalue of the least squares problem falls below Eigen threshold (this
indicates the least squares solution may be ilconditioned). If a bigger
fraction of the windows are grown due to this criterion than Max frac grown, then
DigiFlow will cause the base window size to increase (up to Max base size). If fewer windows are
grown than the fraction Min
frac grown, then DigiFlow will cause the base window size to
decrease (down to Min base
size).
The Coordinate
System controls the conversion between pixel coordinates and any
world coordinate system, while Vector
spacing determines the spacing (in pixels) between the centres of
the interrogation windows.
Outputs
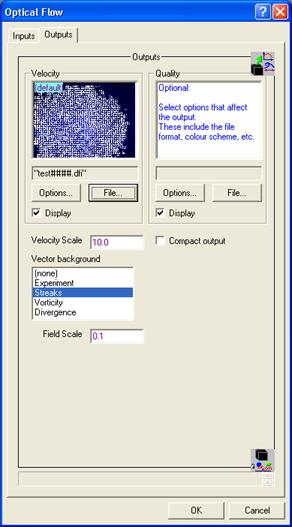
Figure 127:
The outputs tab for Follow Optical Flow.
The principal output of Follow optical flow is the velocity
field. This is specified by the Velocity
selector. As with the PIV system, a scale for the arrows used to display this
is specified by Velocity
scale, and a background image may be placed behind the arrows
with Vector background
(the scale of which is controlled by Field scale, when appropriate). The Compact output check box forces the
resolution of the output to be reduced so that data is saved only at the
locations of the interrogation windows.
The Quality
selector optionally stores information about the performance of the process. In
particular, the first image plane gives the size of the minimum eigenvalue of
the least squares process, while the second image plane gives the size of the
window actually used.
5.7 Tools
5.7.1 Recipe
Toolbutton:
Shortcut:
Related commands: process Tools_TransformRecipe(..)
This process provides a simplified entry point to many
commonly used image processing procedures. Internally, this facility uses the
same mechanism as Transform
intensity and Combine
images described in §§5.7.2 and 5.7.3, but the interface here presents the user with a
broad list of pre-written processes rather than requiring the user to enter
their own code.
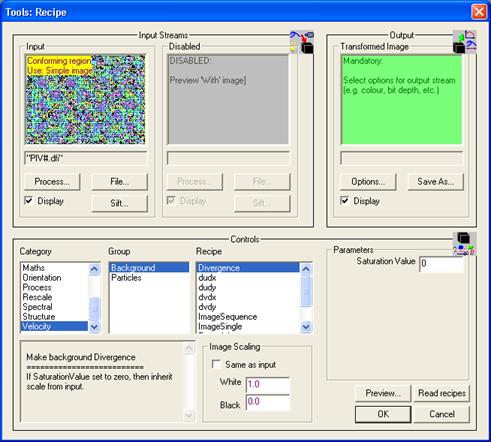
Figure 128
Transform an intensity using a recipe of transformations.
Depending on which recipe is selected, either one or two
input image selectors are required. The Input selector is required for all functions.
This selector determines the timing and other key features. The second stream, With, is required
only for a subset of the functions. For some functions this will represent a
single image, while for others it will be a sequence. The title of the group is
changed to reflect these differences. The controls associated with the With selector are
disabled when it is not required.
Both input selectors have the normal mechanism for their
specification and the range of controls. This may be taken from a file using
the File
button, or from another Process.
The input stream may be sifted (§4.3) to extract
the desired subregion and times. This feature is activated using the Sift button (see §4.3) associated with the input streams.
The Output
group specifies the destination of the transformed image using the Save As button. If
this process is acting as the source for another process, the Save As button is
suppressed (refer to §7 for further details). The
colour scheme and other output options to be used for the output stream are set
by clicking the Options
button. Although the output image will typically have a bit-map format, this is
not always the case. Indeed, this tool can be used to transform a bitmap into a
drawing, as will be illustrated below.
The Controls
for this process centre on identifying the transformation. The predefined
transformations are sorted by Category
and Group. Each
individual Recipe
has a description that will be displayed beneath the selection lists. Some
recipes will require one or more user-specified parameters. The required type
for these parameters depends on the function selected. Some recipes produce
images, and others produce drawings. The simplest way to determine which is by
clicking the Preview
button.
User-defined recipes
Users can add their own custom recipes to the list by
creating a file named User_Recipes.dfc
either in the current directory, or in the directory in which DigiFlow is
installed. (A copy in the current directory will have precedence over one in
the DigiFlow directory.) A typical entry for a single-stream recipe in this
file would look like
Recipe.User.Stretch.Linear.Descr := "Stretch the intensity by a factor";
Recipe.User.Stretch.Linear.Code := {P*p0};
Recipe.User.Stretch.Linear.Prompt0 := "Factor";
Recipe.User.Stretch.Linear.Param0 := 2;
Recipe.User.Stretch.Linear.Check := {if (p0 = 1) {"No
point multiplying by one"} else {null};
This would appear under Categgory User, Group Stretch, Recipe Linear. Here the recipe requires
one parameter, producing the prompt Factor in the interface. The default value of this
parameter is set by the .Param0
variable, and the parameter is provided to the code as the variable p0. In this
case, since a .Check
variable is specified, the value of the parameter is checked. If the .Check code
returns a string, then this is displayed as a warning message.
If two input streams are required, then the variable xxx.With
should be defined, containing either "sequence" or "single",
depending on whether a sequence or only a single image is to be recovered from
the With
stream. The image recovered from the With stream is provided to the .Code in the variable Pb (or, for
image planes in Qb
– refer to §5.7.2 for further details).
The facilities available within the code segment .Code are
exactly the same as those available in the Transform intensity and Combine images tools
described in §§5.7.2 and 5.7.3.
Up to 6 prompts may be requested, their types (integer, floating point or
string) being determined by the type of the default value in the .Paramn variable. Note that the description and code may be
specified interchangeably as strings, code segments or memos.
The database of built-in recipes may be found in DigiFlow_Recipes.dfc
in the DigiFlow installation directory.
5.7.2
Transform intensity
Related commands: process Tools_TransformIntensity(..)
This process allows the transformation of the intensities of
an image stream using a sequence of user-specified operations. This produces a
very versatile tool, but one which requires some experience to master. A
simplified interface to the same underlying mechanism is provided in Transform recipe
described in §5.7.1.
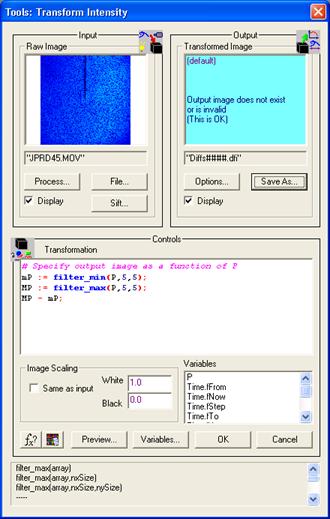
Figure 129: Transform an intensity using a mathematical
expression.
A single image selector provides the input stream in the Input group. This may
be taken from a file using the File
button, or from another Process.
The input stream may be sifted (§4.3) to extract
the desired subregion and times. This feature is activated using the Sift button (see §4.3) associated with the input streams.
The Output
group specifies the destination of the transformed image using the Save As button. If
this process is acting as the source for another process, the Save As button is
suppressed (refer to §7 for further details). The
colour scheme and other output options to be used for the output stream are set
by clicking the Options
button. Although the output image will typically have a bit-map format, this is
not always the case. Indeed, this tool can be used to transform a bitmap into a
drawing, as will be illustrated below.
The Controls
for this process centre on the transformation itself.
The Transformation
edit box is used to specify the intensity mapping function using dfi code.
The basic image from the input stream is supplied in the array
variable P.
For simple images this will be a two-dimensional array. However, for more
complex image formats (such as velocity fields stored in .dfi files), P will contain more than two dimensions.
In such cases DigiFlow will also provide the same data split into its
individual component two-dimensional arrays in the compound variable Q. For example,
if the input stream contains a velocity field generated by the PIV facility
(see §5.6.5.2) then Q.u and Q.v will contain the two components of
the velocity field, and (depending on the options selected during the
processing) Q.Scalar
may contain the vorticity field. Full colour images are supplied as their red,
green and blue components with a three-dimensional P array: P[:,:,0] contains the red component, P[:,:,1] contains the
green component, and P[:,:,2] contains the
blue component. For convenience, these are also supplied as Q.Red, Q.Green and Q.Blue. The button may be
used to search for or provide information on specific DigiFlow functions.
DigiFlow also provides time information about the input
stream through the Time
compound variable. Typically this contains Time.fNow and Time.tNow giving the current frame
number and time (in seconds) relative to the start of the entire input stream.
An additional variable Time.iNow
gives an iteration counter that is the frame number relative to the start of
those that are actually being processed. Details of the entire input stream are
provided through Time.fFirst,
Time.fLast
and Time.tFirst,
Time.tLast
that provide details of the first and last frame/time that exist in the input
stream. Moreover, Time.fFrom,
Time.fTo
and Time.tFrom,
Time.tTo
provide information about which part of the stream is being processed.
The main variables available are listed in the Variables list box.
This list does not, however, include any additional modifiers for the
individual data plane variables beginning with Q. These modifiers include the
description, scaling and (where appropriate) spacing of the data. A more
comprehensive list may be viewed by clicking the Variables button. For further details,
refer to the PIV data example below.
Note that regardless of the format of the input selectors,
all processing is performed in floating point arithmetic and normally the
images will be scaled between an intensity of 0.0 for the darkest parts and 1.0
for the brightest parts. By default, when the image is saved to an 8 bit
format, intensities less than 0.0 will be mapped to 0 and those greater than
1.0 mapped to 255. Refer to §8 for further details
on the interpreter within DigiFlow to evaluate expressions. The Preview button allows
you to preview the result of the transformation before applying it to the whole
image sequence.

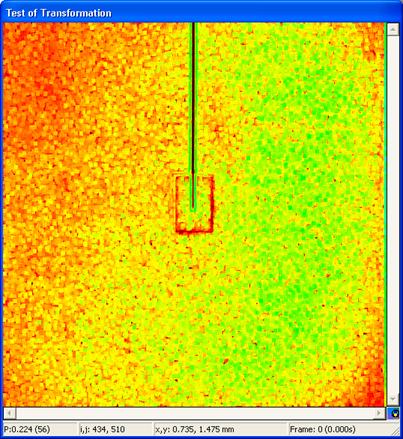
Figure 130:
Example of previewing an image.
Note that the result of Transformation need not be an image, but
can be a DigiFlow drawing. In this case the return value from code specified
for the Transformation
must be the handle to the drawing object (i.e. the handle returned by draw_start(..)). In this
case, the output stream must have a format capable of containing a drawing.
If this feature is started from a dfc macro, then the code specified for
the Transformation
has access to functions and variables defined in that macro. In the case of
variables, the !
global access prefix must be specified.
A number of examples of transformation code are given below.
Rescaling an image
One of the simplest examples is rescaling an image so that
its intensities always span the range 0 to 1, regardless of the input values.
vMin := min_value(P);
vMax := max_value(P);
(P-vMin)/(vMax-vMin);
This particular code segment would have problems if the
image was all the same intensity as then vMin and vMax would be equal which would lead to
division by zero. This problem could be overcome in a number of different ways.
The most straightforward is illustrated below:
vMin := min_value(P);
vMax := max_value(P);
if (vMax
= vMin) {
0.5
} else {
(P-vMin)/(vMax-vMin);
};
Filtering
One process used frequently in image processing is
filtering. In DigiFlow a number of functions are provided specifically in
support of this. In the context of the Transform intensity facility, all that
is necessary is to specify the appropriate filter, if it exists. For example
filter_low_pass(P,5);
will implement a low-pass convolution filter with a 5´5 kernel. In particular, the intensity of
each pixel will be replaced by the mean of it and its 24 nearest neighbours.
The function filter_convolution(..) provides a
more general alternative in which the convolution kernel is specified
explicitly, allowing a broad range of filtering operations. (The filter_low_pass(..) function is
effectively a call to filter_convolution(..) with all the
kernel elements equal to 1/n2, where n is the
specified size of the kernel.)
Built in nonlinear filters include erosion (filter_min(..)) and dilation
(filter_max(..)).
Using DigiFlow’s Fast Fourier Transform function allows the
construction of filters in the wavenumber domain. For example, a low-pass
filter could be constructed using the following Transformation code:
spec := fft_2d(P[0:128,0:128]);
k := sqrt(spec.kx^2 + spec.ky^2);
spec.re := where(k < 16,spec.re,0);
spec.im := where(k < 16,spec.im,0);
image := inverse_fft_2d(spec);
image.re;
Here, we make use of the wavenumber arrays returned by fft_2d(..) rather than
having to work out the ordering in which the function returns the data. The where(..) function then
simply sets all entries with wave numbers in excess of 16 to zero. Note that
the fft
functions can cope with arbitrary numbers of pixels, but are most efficient for
powers of two and other small primes.
Contouring
Often we would like to contour an image for one reason or
another. Suppose we just want to draw the contours in place of the image, then
we could use the following code to step through the various contour levels,
drawing only those contours that were at least 100 pixels long (thus discarding
any high frequency ‘noise’):
out := make_like(P,0);
for thresh:=0.1 to 1 step 0.1 {
this := contour_image(P,thresh,fill:=thresh,minLength:=100);
out := this max out;
};
out;
Obviously we could have superimposed the contours on
the input image. Using other options in the contour_image(..) function would allow us to apply a
low pass filter to the contours.
Similarly, we could fit a parametric curve to the contours,
or perform a FFT and filter them to return a Fourier Descriptor of the enclosed
region. This could be achieved by
this := pixel_contour(P,threshold:=0.9,minLength:=500);
if (this.found) {
# Compute
fourier descripter
fft := fft_row(this.xy[0,:],this.xy[1,:]);
fft.re := where(abs(fft.kx)<8,fft.re,0);
fft.im := where(abs(fft.kx)<8,fft.im,0);
cont := inverse_fft_row(fft.re,fft.im);
out := scatter_to_array(P,cont.re,cont.im,fill:=0);
} else
{
out := P;
};
out;
In this example we only find a single contour, the
result of which is shown in figure131. The code
could easily be modified to loop and so find all contours satisfying the length
criterion. Note that the scatter_to_array(..) function may
leave some gaps in the curve rendered as the curve is drawn using individual
points rather than lines.

Figure 131:
Eighth order Fourier Descriptor showing in black the region of the sheep’s back
with an intensity in excess of 0.9.
Fractal box count
Suppose we are interested in the fractal dimension of a
contour from an LIF image (which may have been processed using the facility
described in §5.6.3.2). In this case we would
probably wish to have a log-log plot of the number of boxes verses the box size
as the output. This may be achieved as follows:
boxes := fractal_box_count(P,0.5);
fit := fit_expression("1;ln(size);","size;",
boxes[:,0],boxes[:,1],"ln(n);","n;");
curve := exp(evaluate_expression(fit,boxes[:,0]));
minSize := min_value(boxes[:,0]);
maxSize := max_value(boxes[:,0]);
minNum := min_value(boxes[:,1]);
maxNum := max_value(boxes[:,1]);
hDraw := draw_start(640,480);
draw_set_axes(hDraw,minSize,maxSize,minNum,maxNum,
xLog:=true,yLog:=true);
draw_x_axis(hDraw,"Box size");
draw_y_axis(hDraw,"Number of boxes");
draw_create_key(hDraw,0.8*minSize+0.2*maxSize,
0.6*minNum+0.4*maxNum,"Key");
draw_mark_type(hDraw,"plus");
draw_line_colour(hDraw,"red");
draw_mark(hDraw,boxes[:,0],boxes[:,1]);
draw_key_entry(hDraw,"Box
counts");
draw_line_colour(hDraw,"blue");
draw_lineto(hDraw,boxes[:,0],curve[:]);
draw_key_entry(hDraw,"Fit:
slope="+(-fit.coeff[1]));
draw_end(hDraw);
hDraw;
Here we see the key element for producing a drawing: the
code returns the drawing handle rather than an image.
Note that this code does more than the bare minimum. Not
only does it plot the (hopefully power law) relationship between the number and
the size of the boxes to cover the contour, but it also generates a least
squares fit to that and plots it. Moreover, the key that is generated will
inform the user of the slope (the fractal dimension) of that fit.
Changing background to velocity data
Suppose we have an image stream containing velocity and
vorticity data, but we wish to change the background of the vectors to be speed
rather than vorticity. In this case the following code could be used:
out.u := Q.u;
out.v := Q.v;
out.Scalar := sqrt(Q.u^2+Q.v^2);
out;
In this example, we have extracted the velocity data without
change. Note that we have used Q.u for the x velocity. The name ‘u’ comes from
the description of the ‘u’
data plane stored in the input stream. We could equally have used the generic Q.u name
instead. For the output image, we cannot use the ‘u’ name, but
must resort to the generic ‘u’ name for the data plane, as we have not yet got a
description for this plane. Similar arguments apply to the other two data
planes. Indeed, we need to be a little bit careful as at present the output
will inherit the ‘Vorticity’
description from the input, even though the output contains speed rather than
vorticity.
This naming problem, along with an associated scaling one is
handled as follows. If no other details are given, then the output will inherit
the details from the corresponding input plane (i.e. the speed output
plane will be called ‘Vorticity’
and have the same scaling as the vorticity). However, overrides can be
specified. If we wish to do this for the above example we may specify a new
description and scaling for the speed plane as follows:
out.u := Q.u;
out.v := Q.v;
out.Scalar := sqrt(Q.u^2+Q.v^2);
out.Scalar_Descr := "Speed";
out.Scalar_Black := 0.0;
out.Scalar_White := max_value(out.Scalar);
out;
Manipulations that you might want to apply to the velocity
data include setting a different plot spacing and scale. This may be achieved
in the above example by setting values for out.u_xStep, out.u_yStep, out.u_Scale, etc. Of course, you
can also change the description for the velocity data, should you so wish.
Note that the input values of these additional controls are
available through Q.u_Scale,
Q.u_xStep,
Q.u_yStep,
… Q.Scalar_Black,
and Q.Scalar_White.
The input description is also available through Q.u_Descr, …, Q.u_Descr. Other features of the input
image such as information about its coordinate system are available through Q.dx, Q.dy, Q.xOrigin, Q.yOrigin, Q.xUnits, Q.yUnits and Q.CoordName.
These variables, however, are not listed in the Variables list box; a more comprehensive
list may be viewed by clicking the Variables button.
Returning images
Images and drawings may be returned in a variety of ways
from the code. In all cases, the final computed or referenced value represents
the image returned, but this may be an array, a drawing handle, or a compound
variable. The table below gives the possibilities and their interpretation by
DigiFlow.
|
Return type
|
Components
|
Interpretation
|
|
2D array
|
|
Simple image.
Colour scheme and scaling determined by dialog settings.
|
|
3D array
|
|
If the input is a
3D array, then the output will be interpreted in the same manner. For
example, a 3D array output from full colour input will be taken as a full
colour image, whereas a 3D array output from a velocity field input will be
interpreted as a velocity field.
|
|
Compound
|
.Image (array)
.Black
(numeric)
.White
(numeric)
.ColourScheme
(string)
.LUT (string
or array)
|
Simple image, but
with the code optionally specifying the intensity to set to black (.Black or .black) and
white (.White
or .white),
and the colour scheme to be used (.ColourScheme or .colourScheme
or .LUT).
Only the specification of the image (.Image, .image or .im) is mandatory.
|
|
Compound
|
.Red (array)
.Green (array)
.Blue (array)
.Red_Black
(numeric)
.Red_White
(numeric)
.Green_Black
(numeric)
.Green_White
(numeric)
.Blue_Black
(numeric)
.Blue_White
(numeric)
|
Full colour
image. The arrays specified for .Red, .Green and .Blue must all be two-dimensional and
of the same size.
The optional .Red_Black, .Red_White, etc.,
set the intensities to be interpreted as black or white for each of the three
colour components.
|
|
Compound
|
.u (array)
.v (array)
.Scalar (array)
.u_Scale (numeric)
.u_xStep (numeric)
.u_yStep (numeric)
.u_ColourScheme
(string)
.Scalar_Black (numeric)
.Scalar_White (numeric)
.Scalar_ColourScheme
(string)
|
Vector field,
specified in .u
and .v
arrays, with an optional background image specified in the .Scalar array.
Both (all three) arrays must be the same size.
The spacing
between the vectors is determined by .u_xStep and .u_yStep, whereas the scale of the
vectors is given by .u_Scale.
The default colour for the arrows (black) may be changed by .u_ColourScheme.
The black and
white values of the optional background image, and the associated colour
scheme, may be changed by .Scalar_Black, .Scalar_White and .Scalar_ColourScheme,
respectively.
|
|
Drawing handle
|
|
The drawing will
be used. If the output is a raster image, then the drawing will be converted
into a bitmap before saving.
|
5.7.3 Combine images
Related commands: process Tools_CombineImages(..)
This process allows multiple input image streams to be
combined in arbitrary ways to produce an output image stream. This facility may
be viewed as an expanded version of the Transform intensity described in §5.7.2. This produces a very versatile tool, but one which
requires some experience to master. A simplified interface to the same
underlying mechanism is provided in Transform recipe described in §5.7.1.
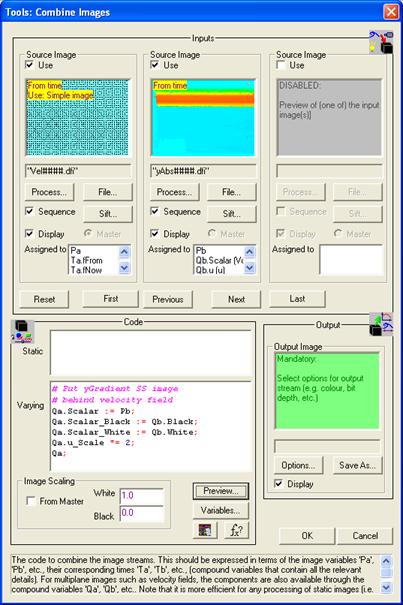
Figure 132: Combine image streams in an arbitrary
way.
Up to 26 image selectors (fewer if operating on a free
licence) provide multiple input streams in the Input group. These are visible three at
a time, with the Next
and Previous, First and Last buttons
providing the ability to move along the list of selectors. Each image stream
may be enabled or disabled through the Use check box, and each is assigned a
two-letter name. For accessing the basic image the first letter is always P, while the
second increases alphabetically from a, for the first stream, through to z, for the last
possible stream. As we will see later, individual data planes for images with
multiple planes of data may be accessed using Qa, Qb,… Qz, and drawings through hDa, hDb,… hDz. The Reset button will
clear the inputs of all selectors, and clear the Use check box for all except the master
stream (stream a).
The individual input streams may be taken as either dynamic
or static. A dynamic stream, indicated by checking Sequence, will have one image read from
it for each frame processed. In contrast, a static stream will read the input
image only once at the start of the process.
Timing details may be set for both dynamic and static
streams using the Sift
buttons (see §4.3) to activate the standard Open
Image dialog (§4.1). For a static stream, the
effect of this is merely to select which image from a sequence is used as the
static image.
Using the Save
As button, the Output
group specifies the destination of the combined image streams. If this process
is acting as the source for another process, the Save As button is suppressed (refer to §7 for further details).
Timing details for the output stream are determined by the
master input stream. This stream is selected using the Master radio button associated with each
input stream. Note that while only one input stream can provide the master
timing details, the process will be terminated when the first of the dynamic
input streams runs out of images.
The Controls
for this process comprise two code groups. The first code group, Static, may be used
to define functions and manipulate the static input streams using their
respective variables (e.g. Pb). This code is executed only once
(except in so far as user defined functions – §8.9
– may be executed many times). Images from either static or dynamic streams may
be referenced in the code, with those belonging to the dynamic stream
corresponding to the first images in such streams. Any return value from this
code will be discarded, but any variables created by the code will be available
to the later Varying
code.
The second code group, Varying, is executed once for each frame
of the dynamic input stream in order to compute the output stream. This code
may access any of the available images (i.e. whether they are from
static or dynamic streams), as well as any variables or functions defined in
the Static
code. The final code statement provides the return value that is stored in the
output stream.
The output from the Varying code may be an array, a drawing
handle, or a compound value containing a number of different components. The
various options here are identical to those for Tools Transform Intensity and are
described at the end of §5.7.2.
As noted above, the basic image from the input streams is
supplied in the array variables Pa, Pb,
… For simple images these will be a two-dimensional arrays. However, for more
complex image formats (such as velocity fields stored in .dfi files), Pa, Pb, … will contain more than two
dimensions. In such cases DigiFlow will also provide the same data split into
its individual component two-dimensional arrays in the compound variables Qa, Qb,… For
example, if the first input stream contains a velocity field generated by the
PIV facility (see §5.6.5.2) then Qa.u and Qa.v will
contain the two components of the velocity field, and (depending on the options
selected during the processing) Qa.Scalar may contain the vorticity field. Full colour
images are supplied as their red, green and blue components with a
three-dimensional Pa
array: Pa[:,:,0] contains the red
component, Pa[:,:,1] contains the
green component, and Pa[:,:,2] contains the
blue component. For convenience, these are also supplied as Qa.Red, Qa.Green and Qa.Blue. The button may be
used to search for or provide information on specific DigiFlow functions.. The button may be
used to search for or provide information on specific DigiFlow functions. If
the input stream(s) contains a DigiFlow drawing (typically one or more .dfd files), then
DigiFlow provides the drawing is available through its handle hDa, hDb, … hDz in addition
to a bitmap version of it in the array variable P. Additional drawing commands may be
added to the drawing handle, or it may be incorporated into a compound drawing
using draw_embed_drawing(..).
DigiFlow also provides time information about the input
stream through the Ta,
Tb,…
compound variable. Typically this contains Ta.fNow and Ta.tNow giving the current frame number
and time (in seconds) relative to the start of the entire input stream. An
additional variable Ta.iNow
gives an iteration counter that is the frame number relative to the start of
those that are actually being processed. Details of the entire input stream are
provided through Ta.fFirst,
Ta.fLast
and Ta.tFirst,
Ta.tLast
that provide details of the first and last frame/time that exist in the input
stream. Moreover, Ta.fFrom,
Ta.fTo and
Ta.tFrom, Ta.tTo provide information
about which part of the stream is being processed.
The main variables available are listed in the Variables list box.
This list does not, however, include any additional modifiers for the
individual data plane variables beginning with Qa, Qb,… Use the Variables button to generate a complete
list of all the variables available and their contents. (This button loads all
the image data then calls the view_variables(..) function.)
If this feature is started from a dfc macro, then the code specified for
the Static and Varying code segments
have access to functions and variables defined in that macro. In the case of
variables, the !
global access prefix must be specified. The Preview button allows you to preview the
result of the transformation before applying it to the whole image sequence
(see Figure 134).
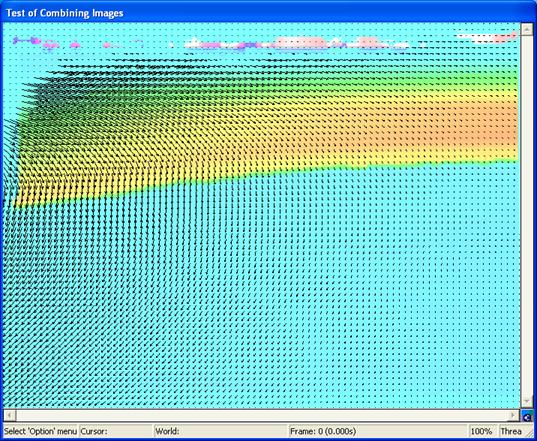

Figure 134:
Preview for Tools: Combine Images.
As is standard with DigiFlow, all the input streams from
integer format image files are interpreted as floating point values between 0.0
for the darkest parts and 1.0 for the brightest parts. By default, when the
image is saved to an 8 bit format, intensities less than 0.0 will be mapped to
0 and those greater than 1.0 mapped to 255.
Note that the result of Varying need not be an image, but can be
a DigiFlow drawing. In this case the return value from code specified for the Varying must be the
handle to the drawing object (i.e. the handle returned by draw_start(..)). In this
case, the output stream must have a format capable of containing a drawing. See
the end of §5.7.2 for a complete list of the output
options.
A number of non-trivial examples are given below.
Aligning images
In some circumstances it may be necessary to force alignment
of images. This may be due to vibration of the camera, for example. Processing in
this case would require two input streams: the images to be aligned, and a
reference image. If the misalignment is small, then the following code could
achieve the desired effect. Suppose that we have some reference point located
near the bottom left corner of the image. These reference points may be found
by looking for some blobs with an intensity exceeding some predefined
threshold. If the images to be processed are presented to input stream Pa and the
reference image to Pb,
then we can divide the task into two parts. The Static code would find the reference
locations of the points, while the Varying code would not only find the current location of
the points, but also shift the image accordingly. To save replication of code,
we choose to define a user-defined function within the Static code that is responsible for
finding the current location of the reference points:
function FindRef(Image,thresh) {
blobs := find_blobs(Image,thresh);
iBlob := max_index_x(blobs[4,:]);
ret.x := blobs[0,iBlob];
ret.y := blobs[1,iBlob];
ret;
};
ref := FindRef(Pb[0:10,0:10],0.15);
For the Varying
code we then use
now := FindRef(Pa[0:10,0:10],0.15);
dx := ref.x - now.x;
dy := ref.y - now.y;
shift(Pa,dx,dy);
Here the shift(..)
function will only move the image to pixel resolution.
If you require subpixel resolution then use shift_interpolated(..) instead.
Note, however, that the latter function must have arrays for the shift indices.
This could be achieved using the following code segment for Varying code instead:
now := FindRef(Pa[0:10,0:10],0.15);
dx := make_like(Pa,ref.x - now.x);
dy := make_like(Pa,ref.y - now.y);
shift_interpolated(Pa,dx,dy);
Here we use the make_like(..) function to convert the shift
increments into arrays for feeding into shift_interpolated(..).
Velocity fluctuations
Suppose we are interested in examining the velocity
fluctuations relative to some mean velocity field. In the simplest case we
would look at the difference between the current velocity field and a time
average field. Suppose the time varying velocity field is available through the
Pa source
stream, and the mean velocity field (perhaps computed by the Time Average facility
described in §5.6.1.1) is specified as the Pb stream with
the Sequence
box cleared. In this case we need not specify any Static code. For the Varying code we could specify:
out.u := Qa.u - Qb.u;
out.v := Qa.v - Qb.v;
out.Scalar := Qa.Scalar - Qb.Scalar;
out;
In this particular case, since all three data planes are
being treated in the same way and we are not changing the description of
scaling of the data planes, we could treat all three planes simultaneously and
simply use Pa – Pb.
Validity of this, however, depends on the contents of the scalar field.
Toolbutton:
Shortcut:
Related commands: process Tools_Accumulate(..)
The operation of this menu item is similar to that of Tools: Recipe (see §5.7.1),
but rather than taking a stream and returning one output image for each input
image, here only a single output image is created. The simplest form of an
accumulation is the mean of the image stream, but this tool is more flexible
(but slightly slower) than the Analyse:
Time Average (see §5.6.1.1). The dialog controlling Tools: Accumulate is
almost identical to that of Tools:
Recipe, with each accumulation recipe being assigned to a Group within a Category. Some of the
accumulation recipies also require Parameters to control their action.
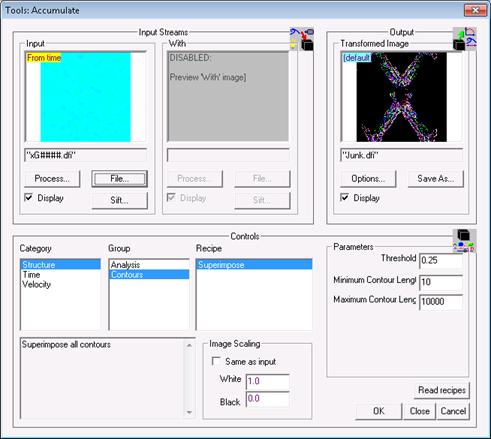
Figure 135: The Accumulate dialog.
User-defined recipes
Users can add their own custom recipes to the list by
creating a file named User_Accumulate.dfc
either in the current directory, or in the directory in which DigiFlow is
installed. (A copy in the current directory will have precedence over one in
the DigiFlow directory.) A typical entry for a single-stream recipe in this
file would look like
Accumulate.User.Statistics.NumberOverThreshold.Descr
:= "Count
the number of images exceeding a threshold";
Accumulate.User.Statistics.NumberOverThreshold.Accumulate
:= {
if
(Time.iNow = 0) {
acc := make_like(P,0);
thresh := p0;
};
acc += P >
thresh;
};
Accumulate.User.Statistics.NumberOverThreshold.PostAccumulation
:= {acc;};
Accumulate.User.Statistics.NumberOverThreshold.Prompt0
:= "Threshold";
Accumulate.User.Statistics.NumberOverThreshold.Param0
:= 0.5;
Accumulate.User.Statistics.NumberOverThreshold.Check
:= {if
(p0 < 1) {"Must have positive threshold."} else {null};
This would appear under Categgory User, Group Statistics, Recipe NumberOverThreshold. Here the
recipe requires one parameter, producing the prompt Threshold in the interface. The default
value of this parameter is set by the .Param0 variable, and the parameter is
provided to the code as the variable p0. In this case, since a .Check variable
is specified, the value of the parameter is checked. If the .Check code
returns a string, then this is displayed as a warning message.
If two input streams are required, then the variable xxx.With
should be defined, containing either "sequence" or "single",
depending on whether a sequence or only a single image is to be recovered from
the With
stream. The image recovered from the With stream is provided to the .Code in the variable Pb (or, for
image planes in Qb
– refer to §5.7.2 for further details).
The facilities available within the code segment .Accumulate are
exactly the same as those available in the Transform intensity and Combine images tools
described in §§5.7.2 and 5.7.3.
Typically the code will start with an if statement, checking Time.iNow, to
set things up on the first iteration. Once all the frames have been processed,
the .PostAccumulation
code is run to form the final output.
Up to 6 prompts may be requested, their types (integer,
floating point or string) being determined by the type of the default value in
the .Paramn variable. Note that the description and code may be
specified interchangeably as strings, code segments or memos.
The database of built-in recipes may be found in DigiFlow_Accumulate.dfc
in the DigiFlow installation directory.
5.7.5 Slave process
Toolbutton:
Shortcut:
Related commands: process Tools_SlaveProcess(..)
Unlike most of the other features in DigiFlow, a Slave
process is intended to provide a mechanism for extracting information directly
from an input stream (including live video) for direct inspection by the user.
The range of uses for this mechanism is continuously expanding and includes
processes ranging from velocity calculation to aids in setting up and focusing
a video camera.
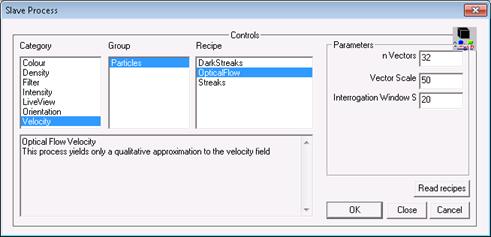
Figure 136: Dialog
controlling a slave process.
As with the recipes described in §5.7.1,
the interface provides a hierarchical interface to a series of macros providing
the desired output. However, unlike a recipes feature, a slave process does not
have an explicit image stream for the source of its data. Rather, it taps on to
the image stream being displayed in the window that had the focus at the time
the slave process was started. This master image may be a movie opened by File:
Open Image, the output of another process, or live video. If the selected
process is not too computationally expensive, then it will take the information
from this stream and process it to produce output each time the master image is
updated. When the master image is live video, then the output may be less
frequent, but can be tailored to make use of adjacent frames, for example.
To specify a slave process, ensure the desired master image
stream is the active window before selecting the slave process menu item. Slave
processes in each Category
are divided into one or more Group,
each of which contains a selection of Recipes. Once the required recipe is
selected, then the Parameters
group may allow specification of optional parameters to provide some control
over the process.
User-defined recipes
Users can add their own custom slave processes to the list
by creating a file named User_SlaveProcess.dfc
either in the current directory, or in the directory in which DigiFlow is
installed. (A copy in the current directory will have precedence over one in
the DigiFlow directory.) A typical entry for a single-stream recipe in this
file would look like
Slave.User.Filter.LowPass.Descr :=
"Low pass filter";
Slave.User.Filter.LowPass.Code :=
{hS := get_active_view();
im := get_image(hS);
if (not(is_null(im))) {
hV := view(im.image);
view_colour(hV,im.lut);
};
while (not(is_null(im))) {
out := filter_low_pass(im.image,p0);
view(hV,out);
im := get_image(hS);
};
close_view(hV);
};
Slave.User.Filter.LowPass.Prompt0 :=
"Length";
Slave.User.Filter.LowPass.Param0 :=
3;
Slave.User.Filter.LowPass.Check :=
{if
((p0 <=
0) or ((p0 mod 2) <> 0)) {"Length must
be positive odd integer"}
else {null};};
This would appear under Categgory User, Group Filter, Recipe LowPass. Here the recipe requires
one parameter, producing the prompt Length in the interface. The prompt is specified by the .Prompt0 string
and the default value of this parameter is set by the .Param0 variable. The type for the
returned parameter must be the same as that of its default value. The specified
parameter is passed to the .Code
as the variable p0.
In this case, since a .Check
variable is specified, the value of the parameter is checked. If the .Check code
returns a string, then this is displayed as a warning message.
Unlike a recipe that needs to deal with only a single image
(or single pair of images), a slave process needs to handle a continual stream
of images, and look after both their extraction from the master image stream
and their display in a suitable format. Typically the code for a slave process
starts by determining the source for the master stream by a call to get_active_view(). The macro get_image(..) is then used
to simplify the extraction of the images from the master stream, whether it be
a standard image stream or live video. In both cases, get_image(..) waits efficiently for a new image
to be available. In the above example, a window (view) is created to contain
the output, then further image are extracted repeatedly from the master stream
until either the slave process or the master image stream is terminated.
5.7.6 To world coordinates
Toolbutton:
Shortcut:
Related commands: process Tools_TransformToWorld(..)
Transforms an image stream to make the associated world
coordinate system orthogonal.
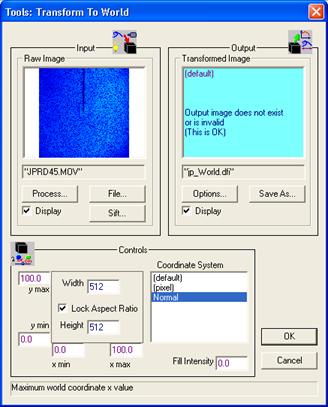
Figure 137:
Transform an image stream to world coordinates.
A single image selector provides the input stream in the Input group. This may
be taken from a file using the File
button, or from another Process.
The Output
group specifies the destination of the transformed image using the Save As button. If
this process is acting as the source for another process, the Save As button is
suppressed (refer to §7 for further details).
The Controls
for this process include the specification of the Coordinate System to be used to map the
image. The limits on the coordinates corresponding to the left (x min), right (x max), bottom (y min) and top (y max) of the output
image, the size of which is specified by the Width and optional Height if the aspect ratio is not to be
preserved.
Any pixels in the output image not corresponding to a point
in the source image is filled with Fill Intensity, 0.0 representing the minimum value, and
1.0 the maximum.
For multi-plane images containing vector fields, the
conversion process will also rescale the vector fields so that they are
converted from pixel to world coordinate systems. Note that this only applies
if the input stream is in pixel coordinates. This feature is of particular
value if PIV velocity fields are computed in pixel coordinate yet are later
required in world coordinates.
5.8 Window
The Window menu follows the standard Windows format and will
not be given in detail here.
5.9 Help
Documentation for DigiFlow resides largely in this manual
plus the dfc Help
facility described in §4.5. This manual is
distributed as both html format in DigiFlow.htm, and as an Acrobat file in DigiFlow.pdf.
5.9.1 Help
(browser)
Toolbutton:
Shortcut:
Related commands:
Clicking on the Help entry in the Help menu will start up an instance of
Internet Explorer and, where possible, take you to the table of contents in the
html version of the DigiFlow User Guide. Selection the function key f1 at any point will
have the same impact, but where possible will jump to the most relevant section
of the guide.
5.9.2 dfc Help
Toolbutton:
Shortcut:
Related commands:
This will start up the dfc Help facility described in §4.5.
5.9.3 Auto help
Toolbutton: 
Shortcut:
Related commands:
When checked, a browser window containing DigiFlow.htm is opened and automatically
scrolled to the relevant section for each action undertaken within DigiFlow.
5.9.4 About
DigiFlow
Toolbutton:
Shortcut:
Related commands:
The Help
About DigiFlow option brings up a screen that gives you DigiFlow
version and build date information (see figure ).
Figure 138: The About
DigiFlow dialog.
6 Techniques
6.1
Determining black
There are a number of ways of determining the intensity to
which black digitises. When working with two light sources for LIF the easiest
way is to take three calibration images. The first image will have the
left-hand light source only, the second the right-hand light source only, and
the third with both light sources turned on. By then using Tools: Combine Images with these three
images forming the Pa,
Pb and Pc input streams, the
following code will determine the black value and test the hypothesis of linear
dye response simultaneously:
Image:=Pa+Pb-Pc;
black := mean(Image);
message("Black:"+black);
Image;
This code first evaluates the difference between the sum of
the images due to the left and right hand light sources separately, and the
image due to the two light sources working in tandem. If black were to digitise
the some value rblack, then we would expect the
resultant Image
to be rblack. Inspection of the resultant image will
highlight any defects in the images or assumptions, while the message box
produced will give the black value.
An alternative method of determining black relies on the
fact that it should have the same digitised value regardless of the camera
aperture. Begin by acquiring two images of the same scene using different
f-stops on the camera. The image with the wider aperture (smaller f/number)
should not quite saturate; the second image should be with the lens stopped
down by one f-stop. The scene should contain a broad range of intensities.
Again using Tools: Combine
Images, with the two images as Pa and Pb, use the following code to first generate
a scatter plot, then fit a least squares regression to that line, and finally
determine the intercept between this and a line of unit slope.
Image := make_array(0,256,256);
Image := scatter_to_array(Image,255*Pa,255*Pb,fill:=1,flags:=1);
y := y_centroid(Image)/255;
x := x_index(y)/255;
fit := fit_expression("1;x;","x;",x[50:250],y[50:250]);
rblack := fit.coeff[0]/(1-fit.coeff[1]);
f := evaluate_expression(fit,x);
hDraw := draw_start(640,480);
draw_set_axes(hDraw,0,1,0,1);
draw_x_axis(hDraw,"Bright image");
draw_y_axis(hDraw,"Dim image");
draw_create_key(hDraw,0.1,0.6,"Key");
draw_mark(hDraw,x,y);
draw_key_entry(hDraw,"Scatter plot",line:=false,mark:=true);
draw_line_colour(hDraw,"blue");
draw_lineto(hDraw,x,f);
draw_key_entry(hDraw,"Fitted curve",line:=true);
draw_text(hDraw,0.2,0.8,"Black:"+rblack);
draw_line_colour(hDraw,"green");
draw_line(hDraw,0,0,1,1);
draw_key_entry(hDraw,"Unit slope",line:=true);
draw_end(hDraw);
hDraw;
The result of this code is shown in figure 139 below.
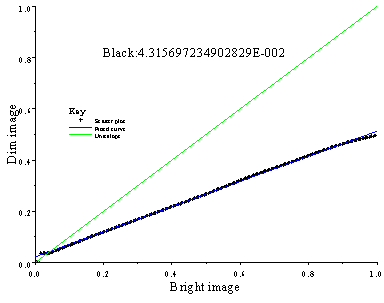
Figure: 139
Scatter plot used to determine ‘black’.
7 Chaining processes
A powerful feature of DigiFlow is the ability to chain
multiple processes together, thus creating an efficient way of automating
complex algorithms for processing image streams. In addition, piping images
allows the full resolution of the image stream to be used, without the need to
map the stream into some image format with a lower intensity resolution for
each pixel.
The procedure for creating a process chain begins by
identifying the process producing the output that is ultimately required, and
work backwards from that point. For example, you may wish to determine the
standard deviation of fluctuations in concentration from an image stream that
contains corrected intensity images of a flow. The final process in this case
is the Time Averaging found in §5.6.1.1.
In the Sequence
group, click the Process
button to indicate that the input image stream will be taken from another
process. This starts the Image Source dialog.
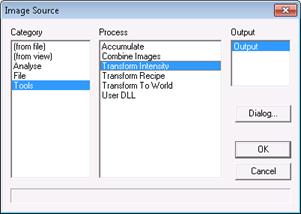
Figure 140: The
image source dialog for connecting processes together.
This dialog contains three list boxes. The first,
labelled Category,
reflects the menu items controlling processes, with the addition of (from file) that
allows the image stream to be taken from a standard file (enables the
corresponding File
button in the parent dialog). The Process list box then lists the various processes
available within the Category
list, and the Output
list box indicates the one or more image streams produced. The source process
is specified by the combination of items selected in these three list boxes.
Clicking Dialog
(or OK if this
is the first time the Image Source dialog has been started for this image
stream and source process combination) will then start up the dialog box for
the source process. In this case the Transform Intensity dialog described in §5.7.2.
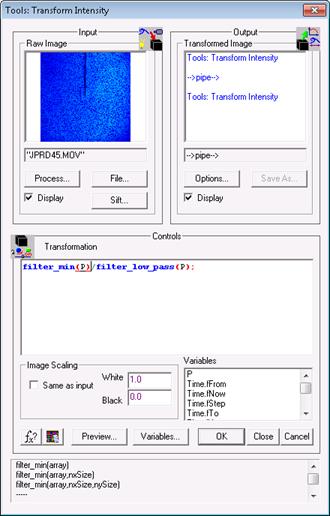
Figure 141:
Transform intensity dialog as part of a process chain.
When a process is acting as a server for another process,
the normal Save As
button is disabled and the destination preview window indicates that the result
will be piped into another process. The remainder of the dialog is unchanged.
Once the image source has been specified using the File button, the timings and region may
be set with the Sift
button (§4.3). Alternatively, the chain may be
extended by selecting another process with the Process button.
Exiting this dialog with the OK button returns to the parent dialog
(here the Time Average dialog).

Figure 142:
Time average dialog at the root of a chain.
This dialog, at the root of the processing chain, requires
the destination for the Output
image stream to be specified. The input image stream (the Sequence group) now has the File button disabled
and indicates the source process in the preview pane. Once the specification of
the dialog is complete, pressing OK will start the process.
8 Interpreter
basics
DigiFlow contains a sophisticated mathematical interpreter
capable of operating directly on numbers, arrays and/or entire images, and of
controlling and automating complex processes. This interpreter is used widely
within DigiFlow to provide the user with the maximum power and flexibility. The
language utilised by this interpreter is often referred to as dfc code within this
manual.
This section outlines the basic syntax, operators and execution
control statements understood by the interpreter, and provides the key elements
required to enter expressions and code segments in dialog boxes associated with
the menu-driven processes provided by DigiFlow. Discussion of the broad range
of basic and advanced functions and the use of the interpreter as a macro or
command language are deferred until §9. Techniques
used to access built in DigiFlow processes and write complete macros are
described in §10. However, only brief details of
the individual functions are given in this manual. More comprehensive
documentation is to be found in the DigiFlow dfc Help facility described in §4.5.
Note that the interpreter is case sensitive with all
pre-defined constants, functions, operators and variables specified by lower
case names. Variables supplied by DigiFlow to represent a data stream or the
result of a specific manipulation normally begin with an upper case character.
8.1 Syntax
The basic syntax of DigiFlow dfc code has some similarities with
other high level languages such as C, Pascal or Matlab, but also has a number
of significant differences.
Of key interest to experienced programmers is that the
assignment statement is :=,
similar to Pascal, with C-like +=, -=,
*= and /= variants. The
conditional assignment operator ?= will only make an assignment if the target variable
(on the right-hand side) does not already exist. Statements terminate with a
semicolon (;),
and blocks of code are delimited with braces ({…}).
Array and list indices utilise square brackets ([…]), with
parentheses ((…)) being used for
function arguments and mathematical brackets. Square brackets ([…]) can also be
used to construct arrays, whereas double angle brackets (<<…>>) can be used to construct a
compound variable.
Exponentation uses a caret (^), while mod, div, max and min are all binary operators. Logical true takes the
numeric value of unity, while false is mathematically zero. Logical negation not(..) is a
function, while the binary comparative operators are =, <>, >, >=, < and <=. Loops take the form for i:=0 to 100 step 2 {…}; or while (condition)
{…};.
Conditional execution uses if
(condition1)
{…} elseif (condition2)
{…} else {…};. Note that for
both while
and if that
the condition must be delimited by brackets.
Variables may be integer, logical, real, array (of real
values), string, compound or list (of arbitrary types). A compound variable is
similar to a structure in other languages, but is more flexible, whereas a list
is effectively an array that can contain a mix of variables of any or all
types. Arrays can be constructed using make_array(..), or directly using square brackets,
e.g. [1 2 3] or [1,2,3]. Components
within compound variables are separated with a dot and can be constructed using
double angle brackets (e.g. this := <<time:=3.0,frame:=6>>).
Standard strings are specified using double quotes as "This is a sample
string". To include double quotes within the string, double
the quote up, i.e. "To
use ""quotes"" within a string." However,
there is a maximum length to a standard string of 256 characters. Longer
strings should be specified as a memo, delimited as {/A memo can hold a string of arbitrary length. All
DigiFlow functions where the 256 character limit on a standard string is likely
to be limiting can accept memos as well as or instead of strings./}. Both strings
and memos (and also blocks of code) may be concatenated using the + operator.
Concatenating a numeric value with a string will cause the numeric value to be
converted into a string before the concatenation. Similarly, concatenation of a
string or a numeric value with a memo will result in a memo. For example, "File"+123 will yield
the string "File123".
More control over the format when converting a numeric value to a string is
achieved using make_string(..). The function
replace_hashes(..) provides a
convenient method for constructing file names with a fixed number of digits
including leading zeros.
A key difference compared with languages such as C or Pascal
is that variable typing is all dynamic and determined by the assignment
statement. A given symbol/name may change between any one of the basic types
during the execution of code. Expressions involving mixed type are often permitted,
with the result being, generally, what is expected. For example, if arr is an array,
then the expression arr + 3 will add three
to every element in arr.
By default, all user-defined functions are pure functions in
that changes to any of the parameters are discarded with the return value being
the way of returning all information to the calling code. The return value is
the result of the last statement to be executed. It is not necessary for this
statement to have a corresponding assignment. For example, the definition function Three() {ret := 3;}; and function Three() {3;}; will both
return the integer three.
8.2 Variables
DigiFlow allows the use and creation of variables within all
code segments. Variable names may use any alphanumeric character, plus the
underscore. Names must not start with a numeric character. Variable names are
case-sensitive.
8.2.1 Simple
variables
There are four basic types of variable: integer, floating
point, array and string. Additionally, there are a number of special purpose
variable types, specifically memo, code and null. The last of these, null, is simply a
place holder with no value, while memos provide a container for blocks of text
that are too long to fit in standard strings. Code variable are a specialist
form of memo that contain executable code.
Normally, declaration statements are not required to create
a basic variable: it need simply occur on the left-hand side of an assignment statement
(§8.3). However, in some cases an array of a
particular size may be required, and in such cases the make_array(..) function, or one of the other more
specialist array constructors (e.g. make_like(..), random_array(..), gaussian_array(..), x_index(..), y_index(..)) should be used on the right-hand
side of an initial assignment statement. Similarly, a list can be created and
initialised using make_list(..).
Both arrays and lists of strings can also be constructed in
line using square brackets. If the contents between the square brackets are
purely numeric, then an array is constructed. If the contents includes any
strings, then a list is created. For example, [99, 98, 97, 96] will construct a one-dimensional array
with four real elements (there are no integer arrays). In contrast, ["dog", "cat", "mouse"] produces a list
with three string elements. The elements of a list need not all be of the same
type, thus ["two", 3, "four"] is valid.
Further information about arrays is given below in §8.4 and lists in §8.5.
A null value can be obtained either by assignment of null, or as the
return value of certain functions (sometimes representing an error condition).
Memo variables can be constructed using the following
syntax: MyMemo := {/The memo is contained between
an openning brace-slash pair, and a corresponding closing slash-brace pair./};. Whereas
standard strings in DigiFlow have a fixed maximum length, memos can be of
arbitrary length. In many places, strings and memos may be used
interchangeably.
Blocks of code are delimited by braces, whether as part of a
control structure (e.g. a for loop or if block) or when being assigned to a variable. For
example MyCode := {a += 5;}; execute(MyCode); creates the
code variable MyCode
then executes it.
For mathematical computations, type conversion will take
place automatically as and where it is appropriate. For example, multiplying an
array by a scalar will produce an array. Division of two integers will produce
a real (floating point) value (integer division is achieved using the div operator).
8.2.2
Compound variables
Compound variables are similar to “structures” or
user-defined “types” in other languages. Compound variables may be used to
store more than one value of the same or different types. They are
distinguished by having a dot (.) within their name. The part of the name to the
left-hand side of the dot is the name of the compound variable, while the part
of the name to the right-hand side is the name of the component: name.component. Each
component may itself be any DigiFlow variable type, including arrays, lists and
compound variables.
Whereas in most languages, the components contained within a
compound variable need to be declared in advance, this is not true for
DigiFlow. Here a compound variable is created by a standard assignment
statement, and as many component variables as required may be added. Moreover,
each of these component variables may themselves be compound variables.
The following example illustrates the use of simple and
compound variables.
Start := 0;
Using.Code := {1 – P};
Using.File := "Test.dfm";
Using.File_Time.FromStep := 0;
Using.File_Time.ToStep := 1;
...
Result := MyProc(Start,Using);
If an existing simple variable appears on the left-hand side
of a compound variable assignment, then the original contents of the simple
variable will be discarded and a new compound variable of the same name
created. In particular,
Var := "simple";
Var.Handle := 1;
Both simple and compound variables may be passed to
functions or returned from functions (see §8.9).
Compound variables are of particular value dealing with the processes that can
be started from menu items (see §10.1.1).
In some circumstances, it can be convenient to assign
multiple parts of a compound variable in a single statement. This is
particularly true when calling a function which takes a parameter as a compound
variable, but where you do not have such a compound variable setup already.
Consider the assignments
This.time := 1.0;
This.frame := 25;
This.file.name := "Test.dfi";
This.file.sequence := false;
These may be reduced to the single compound statement:
This := <<time:=1.0; frame:=25;
file:=<<name:="Test.dfi"; sequence:=false;>> >>;
The compound variable constructors, the << … >> pairs,
are used to bracket the values to be combined into a single compound variable.
As illustrated in the above example, the compound constructors may be nested.
8.2.3 Type
query functions
The type of a given variable may be determined through one
of the inquiry functions is_array(..), is_list(..), is_code(..), is_compound(..), is_integer(..), is_memo(..), is_null(..), is_numeric(..), is_real is_string(..).
8.3 Assignment
Assignment takes place once all the operations and function
evaluations are complete, if there is an assignment operator and variable at
the start of the expression (e.g. a := b+c;). If there is no assignment, the
result will be discarded, or, if it is the last result in a segment of code, it
will be returned to the routine calling the interpreter.
The various assignment operators are listed below:
|
Assignment Operator
|
Description
|
Example
|
|
:=
|
Standard assignment. The result of the expression on the
right-hand side is stored in the variable on the left-hand side.
|
MyArray
:= (Pa + Pb)/2;
|
|
+=
|
Increment assignment. The result of the expression on the
right-hand side is added to the contents of the variable on the left-hand
side and the result stored back on the left-hand side.
|
Count += 1;
Count := Count + 1;
|
|
-=
|
Decrement assignment. The result of the expression on the
right-hand side is subtracted from the contents of the variable on the
left-hand side and the result stored back on the left-hand side.
|
Total –= a;
Total := Total – a;
|
|
*=
|
Multiple assignment. The result of the expression on the
right-hand side is multiplied by the contents of the variable on the
left-hand side and the result stored back on the left-hand side.
|
Value *= 2;
Value := Value*2;
|
|
/=
|
Fraction assignment. The contents of the variable on the
left-hand side is divided by the result of the right-hand side and the result
stored back on the left-hand side.
|
Test /= f;
Test := Test/f;
|
|
?=
|
Conditional assignment. An assignment is made only if the
target variable does not already exist. If the target variable does exist,
then its contents remain unchanged.
|
This ?= default;
Tmp := default;
if (not(exists("This"))) {This := default;};
|
8.4 Arrays
All array variables are inherently four-dimensional,
although in most cases only the first one or two dimensions are used and some
cases the dimensions may be collapsed to make a vector (scalar). Use of
specific elements within an array, and assignment to specific elements of an
array may be performed as shown below. Note that an assignment statement
specifying specific array elements requires the array to exist already. If the
target array of an assignment does not already exist, then the assignment can
only specify the entire array.
Arrays are generated as the result of expressions and as the
return value of many dfc
functions. DigiFlow also includes two functions specifically designed to
construct arrays: make_array(fill,nx,ny,…)
and make_like(template,value).
In the first case, between two and five parameters may be specified to the
function, the first giving the value the array should be initialised with, and
the remainder giving the dimensions of the array (up to four dimensions can be
specified, although only the first dimension is mandatory). The fill parameter must be either an integer or floating point
scalar value. The second constructor, make_like(..), takes the specified template
(which must be an existing array) as a guide to the dimensions of the array
that is required, and initialises it with value.
Unlike fill in make_array(..), the value
passed to make_like(..) may be an
array, the values of which will be packed into the new array (e.g. the
function may be used to convert a two-dimensional array into a one-dimensional
array, or vice versa), filling any extra values in the new array with zeros, or
discarding any surplus values from value if the total
number of elements do not coincide. If value is a
scalar (integer or floating point value), then it is simply replicated to each
of the elements in the newly constructed array.
|
Array
|
Description
|
Example
|
|
a
|
For array variables in expressions, the entire array will be
utilised. For arrays on the left-hand side of assignment statements, the old
contents of the variable will be discarded and replaced by the result of the
expression.
|
This := (First + Second);
|
|
a[i,j]
|
Access to the i,jth element of the array a. Specification in an expression will return a floating
point scalar. Specification on the left-hand side of an assignment will cause
only the i,jth element to be updated. If the right-hand side returns
an array, then the corresponding i,jth element from the
right-hand side is used. If the right-hand side returns a scalar, then this
value is used.
|
i := x_size(Background)/2;
j := y_size(Background)/2;
iCentre
:= Background[i,j];
|
|
a[i0:i1,j0:j1]
|
Access to the sub-array of a spanning
from i0 to i1 and j0 to j1. Specification
in an expression will return an array of size (i1 - i0 + 1)´(j1 - j0 + 1). Specification on the left-hand side
of an assignment will cause only this sub-array to be updated. If the
right-hand side returns an array, then the corresponding sub-array of
elements from the right-hand side is used. If the right-hand side returns a
scalar, then this value is used. If one or both limits are omitted, then the
corresponding limit to the dimension will be used. Hence a[:,:]
corresponds to the entire two-dimensional array.
|
Average
:= mean(
Image[100:200,
100:200]);
Image[100:200,100:200] *= 2/Average;
|
|
a[i0:i1:si,j0:j1:sj]
|
As with the above form, but access elements at intervals of si and sj in the two dimensions.
Note that si, sj can be negative if
the corresponding limits are in reverse order. In this case the order of
elements will be reversed.
|
reduced
:= this[::2,0:10:5]
|
|
a[k]
|
Access to the kth element of a
one-dimensional array. If a is specified in an expression,
then this will return a floating point scalar. Specification on the left-hand
side of an assignment will cause only the kth
element to be updated. The right-hand side must evaluate to a scalar numeric
value.
|
Red := LUT[0:255,0:0];
Red[0] := 0;
|
|
a[k0:k1]
|
Access to the one-dimensional sub-array spanning from the k0th to the k1th element of a
one-dimensional array. It does not matter if the array is a column or a row.
|
Green := LUT[1:255,1:1];
Green[0:128] := 0.5;
|
|
a[k0:k1:sk]
|
As with the above form, but access elements at intervals of sk. Note that sk can be negative if k1 < k0.
|
reverse
:= this[nx-1:0:-1]
|
|
a[]
|
The entire array with all its dimensions. This is equivalent
to a[:,:,:,:]. If on the right-hand side of an expression,
then it is simply equivalent to specifying a.
However, if on the left-hand side, the array elements are replaced by the
right-hand side, maintining the size and shape of the array.
|
this[] := 5;
this := 5;
|
|
[v0,v1,…]
|
When at the end of a variable name, a [..] pair indicates array indices (or
a range of indices) used to access an element (or range of elements) from an
array. However, if not at the end of a variable name, then a [..] pair is
used to construct an array from the list of numeric values it encloses. If
the data is all on the same line, or there is only one data item per line,
then a one-dimensional array is constructed. If there is more than one item
per line and more than one line, then a two-dimensional array is constructed.
For more general input, refer to read_data(..).
|
Dash
:= [2,2,4,2];
|
Additionally, it is possible to use an array containing
integer values as an index into another array. For example,
x := x_index(10);
y := [1 4 5];
x[y] := 0;
# Zero some elements
z := x[y+1]; # Extract some elements
returns one-dimensional arrays in x and z. These contain
[0 0 2 3 0 0 6 7 8 9] and [2 0 6], respectively.
If the index array is two-dimensional, then it may be used to access
multi-dimensional source/target arrays. For example
x := x_index(10,10) + y_index(10,10)/10;
y := make_array(0,3,2);
y[0,:] := [5 2];
y[1,:] := [3 6];
y[2,:] := [9 4];
z := x[y];
gives z as [5.2 3.6 9.4]. An array index of this form always returns or absorbs a
one-dimensional array. Similar functionality may also be obtained using indirect(..), sample_values(..) and scatter_to_array(..).
One-dimensional array indices can be used for each of the
dimensions of the source/target array to extract or assign over an ordered
two-dimensional space. Moreover, one-dimensional array indices may be used in
conjunction with index spans or fixed index values. For example,
x := x_index(10,10) + y_index(10,10)/10;
i := [1 4 5];
z := x[i,2:3];
gives z as the two-dimensional array [[1.2 4.2 5.2][1.3 4.3 5.3]]. Although the above example is used
with an array index on the right-hand side, a similar arrangement can be used
for a combination of normal and array indices on the left-hand side of the
assignment.
8.5 Lists
A list is similar to an array in that it contains multiple
values which are accessed by specifying different indices or ranges of indices.
However, unlike an array, a list can contain a mix of different data types. For
example, a[0] might contain an integer, a[1] might contain a
string and a[2] might contain an array, a compound
value or indeed another list.
All list variables are inherently two-dimensional, although
in most cases only the first dimension is used. Use of specific elements within
a list, and assignment to specific elements of a list may be performed in the
same way as for regular arrays. As with arrays, an assignment statement
specifying specific list elements requires the list to exist already. However,
unlike arrays, computations cannot be performed simultaneously on the entire
list, although lists can be passed as arguments to functions, etc.
Lists are generated as the result of the return value of
some dfc
functions (they cannot be the result of expressions other than a simple
assignment). DigiFlow also includes a function specifically designed to
construct arrays: make_list(fill,nx,ny).
As with make_array(..), the list is
initialised to the value specified in fill; this may
be any data type, including a list. The second, and optionally the third,
parameter then specifies the dimension(s) of the list.
Some restrictions apply to list elements containing arrays, compound
values or lists. In particular, the list syntax does not allow direct access to
components of such values, although the list may contain an array, compound
value or list in its entirety. For example
List := make_list(null,3);
cValue.string :=
"Valid example";
cValue.version
:= 1;
List[1] := cValue;
…
this := List[1];
message(this.string);
List[1].string
:= "Replacement string";
A := x_index(100);
List[2] := A;
B := List[2][10:20];
is valid, while
List := make_list(null,2);
List.version[1] := 1;
message(List.string[1]);
is not.
The rules governing indices for lists is the same as those
for arrays, with the one difference that lists are limited to two dimensions
only. Thus, techniques such as array spans and index arrays can be applied to
lists.
8.6
Operators
A complete list of the operators understood by DigiFlow is
given below, grouped in order of the precedence (i.e. the order in which
they are computed). For arrays, all operations are computed element by element.
Hence, two arrays multiplied together produce and array where each element is
the product of the two corresponding elements in the two source arrays (i.e.
not matrix multiplication).
|
Group
|
Operator
|
Description
|
Examples
|
|
Association
|
|
|
|
|
|
(…)
|
Brackets.
Terms within innermost brackets computed first.
|
|
|
Unary
|
|
|
|
|
|
–
|
Negative.
–a returns the negative of a.
|
|
|
Power
|
|
|
|
|
|
^
|
Exponentation.
a^b raises a to the power of b.
|
3^2
p^(1/2)
|
|
Term
|
|
|
|
|
|
*
|
Multiplication.
a*b multiplies a by b.
|
3*2
2.1*sin(x*pi)
|
|
|
/
|
Division.
a/b
divides a by b.
|
1/2
exp(r/p)
|
|
|
div
|
Integer
division.
a div
b returns the integer part of a/b.
|
p div 16
f div (1 + g)
|
|
|
mod
|
Modulo
division.
a mod
b returns a – c
where c is the largest integer multiple of b less than or equal to a.
|
q mod 10
(i+1) mod n
|
|
Sum
|
|
|
|
|
|
+
|
Addition.
a+b adds a and b.
Also used to concatenate strings, memos or code variables.
|
3 + p/2
log(1+x)
|
|
|
–
|
Subtraction.
a–b subtracts b from a.
|
1.9 – p
pi*sin(x)–pi/2*cos(x)
|
|
|
min
|
Minimum.
a min
b returns the lesser of a
or b.
|
|
|
|
max
|
Maximum.
a max
b returns the greater of a
or b.
|
|
|
Group
|
|
|
|
|
|
=
|
Equality.
a =
b returns true (1) if a and
b are equal, or false (0) if unequal.
|
|
|
|
<>
|
Inequality.
a <>
b returns false (0) if a
and b are equal, or true (1) if unequal.
|
|
|
|
>
|
Greater
than. a > b
returns true (1) if a is greater than b, or false (0) if a is less than
or equal to b.
|
|
|
|
>=
|
Greater
than or equal to. a >= b
returns true (1) if a is greater than or equal to b, or false (0) if a is less than
b.
|
|
|
|
<
|
Less
than. a < b
returns true (1) if a is less than b, or false (0) if a is greater
than or equal to b.
|
|
|
|
<=
|
Less
than or equal to. a <= b
returns true (1) if a is less than or equal to b, or false (0) if a is greater
than b.
|
|
|
Logical
|
|
|
|
|
|
and
|
Logical
and. a and b returns true (1) if both
a and b are true.
|
|
|
|
Or
|
Logical
or. a or b returns true (1) if
either a or b are true.
|
|
|
|
eor
|
Exclusive
or. a eor b returns true (1) if only
one of a and b is true.
|
|
|
|
xor
|
Identical
to eor.
|
|
8.7
Constants
|
Constant
|
Value
|
Description
|
|
true
|
1
|
Logical true. In arithmetic operations, true takes the value
of unity.
|
|
false
|
0
|
Logical false. In arithmetic operations, false takes the value
of zero.
|
|
pi
|
p
|
Approximately 3.141592653…
|
|
null
|
no value
|
Used to indicate that no value is specified. This may be
tested by the is_null(..) function.
Some functions (e.g. read_image(..)) return a null to indicate failure. Null values
cannot take part in any expression except as the parameter to the is_null(..) function.
|
|
wait_for_ever
|
-1
|
This constant is intended for use as a timeout
parameter in some of the thread and timing related functions (e.g. kill_thread(..)).
Specifying this value will cause the corresponding function to wait for
completion.
|
|
do_not_wait
|
0
|
This constant is intended for use as a timeout
parameter in some of the thread and timing related functions (e.g. kill_thread(..)).
Specifying this value will cause the corresponding function to return
immediately and not wait for completion.
|
8.8 Execution
control
|
Control
|
Description
|
Example
|
|
|
Comment. Ignore all text up to the end of the line.
|
a := 3;
|
|
if (condition)
{code};
|
If statement. The code is executed
only if condition returns a nonzero scalar value.
For array conditions, the where(..) function
should be used.
|
if (Failed) {
P := P^2;
};
|
|
if (condition)
{ code1 } else { code2 } ;
|
If statement with else clause. If condition
is a nonzero scalar value, then code1 will be executed, else if condition is a zero scalar value, then code2 will be executed. For array conditions,
the where(..) function should
be used.
|
if (is_array(Image)) {
view(hView,Image);
} else {
close_view(hView);
};
|
|
if (condition1)
{ code1 }
elseif (condition2)
{ code2 }
elseif (condition3)
{ code3 }
…
else { coden } ;
|
Compound if statement. The code associated with the first
condition evaluating to a nonzero scalar will be executed. If all conditions
produce zero values, then coden will be executed (if specified). Note that the
else statement is optional.
|
if (Result = 5) {
OK := false;
} elseif (Result = 6) {
Test := 8;
} else {
Test := 9;
};
|
|
while (condition)
{code};
|
Execute the code repeatedly while condition evaluates to a nonzero value.
|
i := 0;
while (Image(i,10)< p) {
i += 1;
};
|
|
for var
:= start to end
{code};
|
Execute code repeatedly with var taking successive scalar values from start to end, incrementing by one
on each successive iteration.
|
for k:=0 to 255 {
LUT(k,0) := k/255;
LUT(k,1) := 1 - k/255;
LUT(k,2) := k/255;
};
|
|
for var
:= start to end step incr
{code};
|
Execute code repeatedly with var taking successive scalar values from start to end, incrementing by incr on each successive iteration. Note that start, end and incr
may be either integer or floating point values.
|
for i:=0 to 100 step 10 {
sum
+= v[i,0];
};
|
|
for var
:= array {code};
|
Execute code repeatedly with var taking each element from array
in turn..
|
for this := val[:,3] {
m := f*log(this);
};
|
|
for var
:= list {code};
|
Execute code repeatedly with var taking each element from list
in turn..
|
for this := files[:] {
det
:= read_image_details(this);
};
|
|
execute(code)
|
Executes the code, string or memo stored in a variable. This
includes compiled code (see below).
|
Code
:=
{A
:= B + 1;};
execute(Code);
string := "cos(A)";
q := execute(string);
|
|
try_execute(code)
|
Similar to the execute(..) statement, except that if the code
contains an error it does not prevent the dfc code from continuing to run. In
particular, try_execute(..) returns a
logical that indicates if the code rand without error (true) or not (false).
|
Code
:=
{A
:= B +/ 1};
ret
:= try_execute(Code);
|
|
exit;
|
Leave the current execution unit (e.g. a function or for loop).
|
|
|
quit;
|
Terminate the current code.
|
|
|
exit_digiflow();
|
Terminate DigiFlow with a zero exit code.
|
|
|
exit_digiflow(exitCode [,delay]);
|
Terminate DigiFlow with the exit code exitCode. It is normally
necessary for there to be a small delay between issuing this command and
starting to terminate DigiFlow to allow the current code segment to complete.
The default delay is 2 seconds, but may be changed
with the optional delay.
|
|
|
compile(code[,run]);
|
Compiles code to an intermediate
level that provides approximately a factor of two improvement in performance
for loops containing simple operations. The return value can be run multiple
times, or the code may be executed directly by specifying the optional run parameter.
Note that the use of array operations, rather than loops, will
almost always execute very substantially faster.
|
Code := {for i:=0 to x_size(P)-1 {P[i] /= I;};};
Comp := compile(Code);
execute(Comp);
|
|
reverse_polish(code);
|
Execute the specified code using dfcRP, the DigiFlow reverse
polish interpreter. (The example here is directly equivalent to that used in
the compile(..) example.
Note that compile(..) can also be
used to improve the performance of dfcRP code.
|
reverse_polish({0 )P x_size( 1 – 1 \i {I ] I /= P[ });
|
|
in_parallel(parallel)
|
On multiprocessor systems, determines whether DigiFlow should
try to execute parts of its code in parallel (when possible) to improve
performance.
|
|
|
is_parallel()
|
Indicates whether parallel execution has been requested.
|
|
8.9
User-defined functions
The DigiFlow interpreter accepts user-defined functions. The
syntax of the definition is
function func(a,b,…) { statements… };
where func is the
user-specified name of the function and a,b,… are the one or more formal arguments. The statements to
be executed when the function is invoked are enclosed by the pair of braces.
By default, variables used within the function (including
the formal arguments) are local to the function. If you wish to read (or write
to) a variable that exists in the parent context, the name of the variable
should be preceded by an exclamation mark (e.g. to access the variable p from the parent context, use !p). Note that ! will provide
access to variables in all ancestor contexts of the function (i.e. the
variable need not be in the immediate parent). Global variables (e.g. pi) are always
available for use in an expression and do not require the ancestor access
prefix; any attempt to write to a global variable will throw an error.
The return value is the result of the last statement
executed. To return a specific value, this need simply be the content of the
last statement. Note that either simple variables (§8.2.1),
compound variables (§8.2.2) or lists (§8.5) may be
returned.
By default, the return value of a function (the last value
of the function computed) is copied across before the local function variables
are destroyed. This behaviour is not always optimal. For example, with the
function
function
UnitArrays(nx,ny)
{
a.x :=
x_index(nx,ny)/(nx-1);
a.y :=
y_index(nx,ny)/(ny-1);
a;
};
a copy of the compound variable a has to be
made. This requires time and increases the peak memory requirements. As an
alternative, the return value can be specified as @name, as in the modified example
function
FastUnitArrays(nx,ny)
{
a.x :=
x_index(nx,ny)/(nx-1);
a.y :=
y_index(nx,ny)/(ny-1);
@a;
};
In this case the contents of the variable a is taken over
by the return value of the function, improving performance. Note, however, that
the syntax @name will not work if the return value is itself an
expression, a number or a string.
The return value of a function need not be used by the
calling code. Invoking a function without an assignment statement simply
executes the function and discards any value returned.
In the function declaration it is possible to specify
default values for the formal arguments, thus making their specification
optional in the call to a function. For example, in
function RescaleImage(im,Scale:=1,Black:=0) {
Scale*(im-Black);
};
The im parameter is mandatory, while both Scale and Black are
optional. If Scale
is not specified, then it takes the value 1. Similarly, if Black is not
specified, the value defaults to 0. The function may then be called in
one of the following ways:
Q := RescaleImage(P);
Q := RescaleImage(P,2);
Q := RescaleImage(P,Scale:=2);
Q := RescaleImage(P,2,0.03);
Q := RescaleImage(P,Scale:=2,Black:=0.03);
Q := RescaleImage(P,Black:=0.03);
When a parameter is not specified, the default value is
that given by the corresponding assignment statement within the parameter list
in the function declaration. Thus the above function calls are equivalent to
Q := RescaleImage(P,1,0);
Q := RescaleImage(P,2,0);
Q := RescaleImage(P,Scale:=2,0);
Q := RescaleImage(P,2,0.03);
Q := RescaleImage(P,Scale:=2,Black:=0.03);
Q := RescaleImage(P,1,Black:=0.03);
In most circumstances, the last of these in its
original form, i.e.
Q := RescaleImage(P,Black:=0.03);
should be avoided: you should only exclude parameters
from the end of the list. As an alternative, a null could be specified for Scale, with the
declared function resolving the appropriate default in that case. In
particular,
function RescaleImage(im,Scale:=1,Black:=0) {
if (is_null(Scale)) then {Scale := 1};
Scale*(im-Black);
};
then allowing a call of the form
Q := RescaleImage(P,null,Black:=0.03);
By default, variables, constants and expressions are passed
to functions by value. This means that the formal parameter is treated as a
local variable within the function and any changes you may make to it are not
reflected in the value of the actual parameter in the code calling the
function. In this model, the only way of returning information to the calling
code is through the return value.
DigiFlow also supports a mechanism for passing arrays and
compound variables by reference. Although problems can arise using this
mechanism, it can greatly improve the efficiency of functions by reducing the
amount of copying the interpreter must do.
To invoke passing a variable by reference, the names of the
formal arguments must be prefaced by an @ character in the formal parameter
list. For example, the code segment
function Try(@test) {
test[1] := 2;
};
This := [0 0];
Try(This);
completes with This equal to [0 2].
While this can speed up execution, especially if passing
large arrays, the precise behaviour is complex. It is therefore recommended
that you obey the following guidelines when using an @name:
à If @name refers to an array or list, it should only appear on
the right-hand side of an assignment statement, although array elements or
subarrays can be on the left-hand side of an assignment (as in the above
example). Thus
function Assign(@array) {
array := 0;
};
is not acceptable whereas
function Assign(@array) {
array[:] := 0;
};
will behave predictably.
à If @name refers to a simple scalar (integer, floating point or
string), it will always be passed by value.
à If @name refers to a compound variable, it may appear on either
the left- or right-hand side of an assignment statement. If it appears on the left-hand
side, then the assignment must be to only one of the component variables. In
this case, the modified component will be passed back to the calling routine.
As the components of compound variables may be of any type
without affecting the above guidelines, it is recommended that compound
variables be used to improve execution speed where appropriate. In general,
however, it is better to write pure functions that only return information via
their return value. This return value, of course, may be any type of value,
thus allowing full flexibility.
As with other DigiFlow functions, user-defined functions may
be used with or without keywords.
8.10 User input and
ouput
The interpreter supports a variety of functions for
interacting with the user during execution. These include the input functions ask_string(..), ask_list(..), ask_integer(..), ask_real(..), ask_yesno(..), ask_image(..), ask_file(..), ask_directory(..) and ask_printer(..). These
functions are all modal (i.e., they take the focus away from the rest of
DigiFlow and you will not be able to do anything else until you have closed the
associated dialog). However, most also have modeless equivalents that allow you
to continue working on other things before dealing with the dialog. In
particular, ask_yesno_modeless(..), ask_integer_modeless(..), ask_real_modeless(..), ask_string_modeless(..), ask_list_modeless(..), ask_image_modeless(..), ask_file_modeless(..), ask_directory_modeless(..), and message_modeless(..).
Alongside these are the mouse input functions get_mouse_click(..), get_mouse_line(..), get_mouse_rect(..), and get_mouse_box(..) with get_mouse_position(..) detailing the
current location of the mouse. (The functions mouse_get_mode(..) and mouse_set_mode(..) can be used to determine or set
whether the mouse is acting normally, scrolling/panning, measuring, etc.)
At a more basic level, get_key(..) can be used
to determine the state of a key on the keyboard.
User output is provided through message(..), beep(..) and status_bar_message(..).
A different approach to user input and output is through
opening a console. This can be opened with open_console(..). Input and output via the console
can then be achieved using read_console(..) and write_console(..). When
finished, the console may be closed using close_console(..). Note that the functions open_file(..), write_file(..) and close_file(..) may also be
used with a console.
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow. See also §9.7
on file handling.
8.11 Input of
code from files
In many cases it is desirable to be able to store
interpreter code in a file for later use. DigiFlow supports the use of such
code through the include(s)
command. Here, s represents a string variable or
string constant specifying the file name. Upon execution, include(s)
is replaced by the contents of the file named by s.
This file may contain one or more statements, function definitions, etc.,
and may be called either as a statement (with no return value), or as a
function within an expression. Note that, unlike a normal user-defined
function, variables used and declared within the file have the same scope as
though they were included explicitly within the parent code. In this way the include(s)
statement is similar to (but more flexible than) the ‘include’ directive used
in many programming languages.
If the string s does not specify a
file extension, then .dfc
will be assumed. Moreover, if the file is not found in the current working
directory, the dfc
search path (see get_dfc_path(..) and set_dfc_path(..)) will be
used. If the file is still not found, then the DigiFlow program directory will
be tried.
To improve execution speed, the file specified by include(s)
is read in only once within a given process, and stored for any subsequent use.
This behaviour reduces the need to define functions in static code expressions
to handle dynamic data streams.
The function get_file_variables(..) will execute the dfc code in a file in
a similar way to include(..), but will
return all the variables created in executing as a compound variable. The file
specified in calling this function is executed as though embedded in a user
defined function (i.e. it will need to make use of the ! global specifier
to access variables from the calling context).
If you wish to include and execute code that might fail or
might contain errors, then try_include(..) will include
and execute the code, but return a logical variable that indicates if the code
ran successfully (true)
or failed (false).
8.12 Debugging
DigiFlow provides a number of useful debugging tools for
identifying problems in user-supplied code. These tools include retrospective
error handling, output messages, and interrogation of the variables defined at
a given time.
8.12.1 Error
handling
Inevitably there will be times when user dfc code encounters a problem. Although
it may not always succeed, DigiFlow will attempt to identify this problem and
terminate the process in a clean manner. In doing so, it will produce the
diagnostic dialog shown in figure 143.
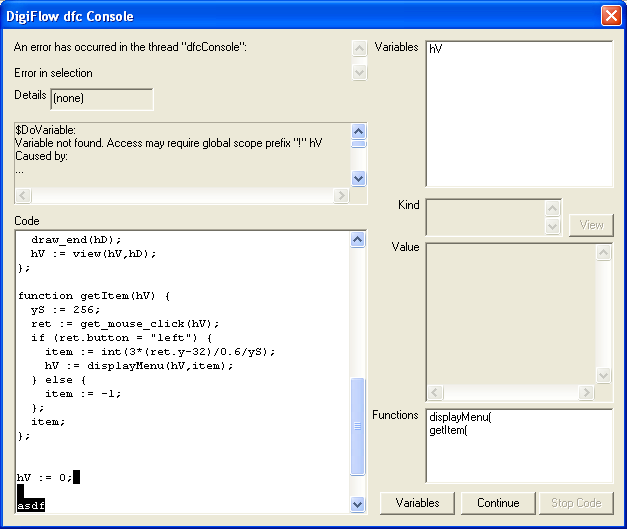
Figure 143: The dfc error diagnostics dialog.
The basic error message is displayed in the two top edit
boxes of the dialog, while the code causing the problem is displayed in the Code box. The
particular statement at fault (or one very close to it) is left highlighted in
this box.
The Variables
list gives information about all the variables defined at the time of the error
occurring. The type contents of each variable are given in the Kind and Value boxes,
respectively. For arrays and drawings, the View button may be used to give a
graphical representation. If you require more detailed access to the variables,
click the Variables
button at the bottom of the dialog. This will start up the View Variables dialog (see §8.12.2). Finally, the Functions box lists any user-defined functions
in the current context.
8.12.2 View variables
When debugging code it is often useful to interrogate the
contents of all variables at a given point in the calculation. This may be
achieved by a call to the view_variables(..) function.
Calling this function from within a dfc code segment will produce the dialog shown in figure 144.
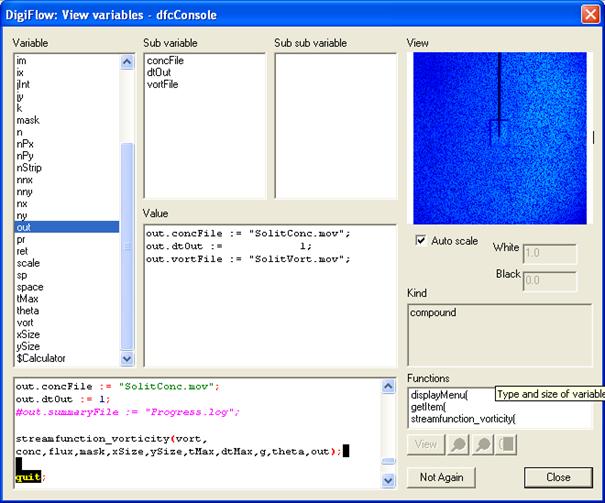
Figure 144: The view_variables(..) dialog.
Selecting a variable from the Variable list will display its contents
in the Value
box. If the variable is a compound variable, then the names of its components
will be displayed in the Sub
variable list. Selecting a name from the Sub variable list will refine the Value displayed.
Similarly, if the selected Sub
variable is itself a compound variable, the components will be
displayed in the Sub sub
variable list.
If the variable selected is an array or a drawing object,
then a graphical representation of it will be displayed in the View box. To obtain a
larger version, click on the View
button. For an array, the scaling of the image is controlled using Auto scale in
conjunction with Black
and White. The View button will
produce an enlarged version of the image in its own window, whilst  ,
,  and
and  zoom in, zoom out and
change the colour scheme, respectively.
zoom in, zoom out and
change the colour scheme, respectively.
Note that variables beginning with a dollar ($) symbol are
system variables and are not available for direct use by the user. In the
example shown in figure 144 these system variables
contain the root copy of the drawing identified by the user variable hDraw.
The view_variables(..) function has
one optional logical parameter: if true (the default), then the dialog will
be displayed. If false,
then the dialog will not be displayed. Related to this is the return value of
the function: true
if Close is
clicked, or false
if Not Again is
pressed. This provides a convenient method of switching off the view_variables(..) output, as
illustrated in the following code segment:
debug := true;
for i:=0
to 100 {
debug := view_variables(debug);
};
Here, the variable debug is initially set to true, thus
enabling view_variables(..). This state
will continue until Not Again
is clicked, effectively setting debug to false. Of course, it is possible for the code to
subsequently set debug
back to true
and thus turn the viewing of variables on again.
8.12.3 Messages
The most basic approach to debugging is to write out
information to the user/developer as execution of code proceeds. DigiFlow
provides two main mechanisms for this: the message(..) function, and writing out to a
console. While the message(..) function
provides the simplest route, it can be annoying to the user to have to respond
to each and every message produced from within a loop. In contrast, by using
the open_console(..) and write_console(..) functions (or
the equivalent open_file(..) and write_file(..)
implementations) a continuous stream of data will be written to a console
window. For example, the code
hFile := open_file();
x := make_array(0,128);
x := x_index(x);
for k:=0
to x_size(x)-1 {
write_file(hFile,"Now at",k,x[k]);
};
produces the console window shown in figure 145.
Figure 145:
Example of output to console window.
For short messages, it may prove convenient to write them to
the status bar with status_bar_message(..). This
technique can work well for something running in the background, but it can be
confusing if more than one macro is trying to do the same thing!
Another option, which has some advantages but tends to be a
bit more cumbersome, is to write text either to the window (view) title using view_title(..), or to write
the text to its own view window. Both these possibilities are illustrated in
the following code:
hV := new_view(256,64);
view_title(hV,"View to contain
text messages");
view(hV,"This is an
example of text to a view.");
The output produced by this is shown in figure 146. Note that unlike the console, a second view(..) statement
specifying text replaces the original text rather than appending it to the
view.
Figure 146: Example of text
written to a view.
8.12.4 Queries
The ability to determine the intermediate results within a
statement without affecting the result of that statement may sometimes be
useful while debugging. DigiFlow supports this through the query operator ?. This operator
has no effect on the sequence of execution, but simply causes the result of the
statement or sub-statement immediately following it to be displayed in some
manner. The following illustrates by way of example the effect of the query
operator.
|
Example
|
Result
|
|
?5 + 3
|
5
|
|
?(5 + 3)
|
8
|
|
?a := 5 + 3;
|
8
|
|
sqrt(?16)
|
16
|
|
?sqrt(16)
|
4
|
|
?img[0,0]
|
The contents of the first element of the array.
|
|
?img
|
The whole of the img array.
|
By default, query operators are ignored in standard interpreter
contexts. That is, they have no effect on the code and produce no output. To
turn on the output, simply call allow_query(). In the standard context, this will then generate a
message box for each query as it is processed. Query output may be turned off
again by allow_query(false). When running in
the dfcConsole
(see §8.12.7), the output of queries is written to
a dedicated window.
8.12.5 Break
points
Another valuable debugging tool in DigiFlow is the provision
of break points which allow monitoring of code execution without otherwise
affecting that execution. A break point is specified by the ampersand character
&, and
may inserted into any point in the code. The interpreter’s response to the
break point depends on the environment in which DigiFlow is running.
In a standard interpreter context, breaks will have no
effect unless first enabled by a call to allow_break(..). If called in a standard
interpreter context, then will invoke the view_variables(..) function. Clicking Not Again to exit view_variables(..) will suppress
the action of further break points unless another call to allow_break(..) is made.
If called in the dfcConsole, then execution will stop and the view_variables(..) functionality
is again available. The execution or otherwise of breaks is controlled by a
check box.
8.12.6
Tracing execution
Sometimes, the best way of locating a bug is to keep track
of exactly where execution is taking place in the code. The function trace(..) turns on a
facility to do this. Tracing can be provided either to a specified file, or to
a console window (which is opened automatically). The trace will write to the
file (or console window) each statement as it is executed. This logging
continues for the period of time specified in the call to trace(..) (the default
is 10 s). Note, however, that trace(..)
is only available for dfc
code executed through the dfcConsole.
8.12.7 dfcConsole
The dfcConsole,
described in §5.2.10, provides a powerful
interactive tool for both editing and debugging dfc code.
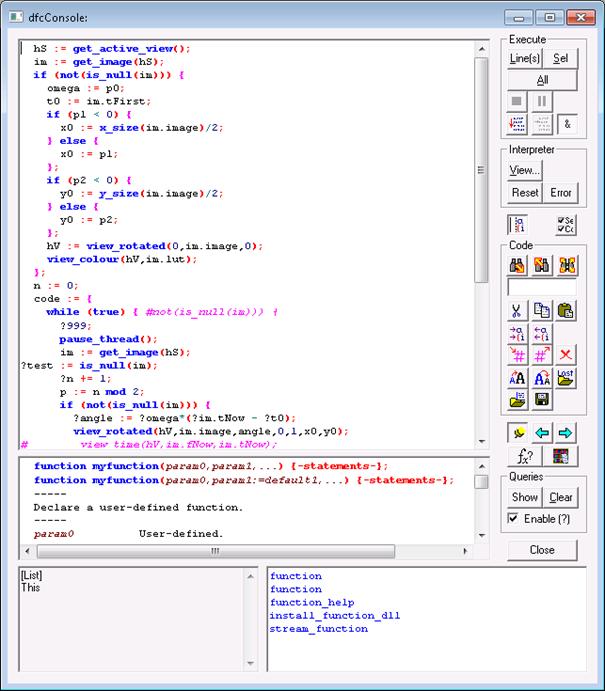
Figure 147: The dfcConsole for writing and debugging dfc
code.
This resizable window contains an edit control allowing
interactive editing of the dfc
code to be run, alongside a series of controls allowing control over the
execution environment and providing timely information.
The Execute
group may be used to selectively execute code. If there is no text selected,
then Line(s)
will execute the current line. If there is an active selection, then Selection will
execute the selected code, and Line(s)
will execute not only the selected text, but all the lines on which some text
is selected. Regardless of the selection, All will cause the entire code to be
executed. Note that <alt><enter>
is equivalent to clicking Line(s).
All the control buttons are disabled while the code is
executing with the exception of Stop
in the Execute
group. Clicking the stop button will abort the currently executing code,
while the pause button will temporarily suspend execution. Checking
Breaks (&)
causes break points, indicated by an ampersand in the code (see §8.12.5)
to be executed as and when they aroe found by the interpreter. If cleared, then
the break points are ignored. Note that the status of the Breaks (&) dialog may be changed by
the user as the dfc
program runs.
The Interpreter
group controls the internal state of the DigiFlow interpreter. Reset will clear all
variables and functions from the interpreter, while View displays the variables and objects
defined within the interpreter using the view_variables(..) interface. If an error occurs, then
Last Error will
redisplay the last error message.
The Code
group controls the action of the edit control containing the code.
For further details, refer to §5.2.10.
9 Functions
This section describes the more advanced functions available
within DigiFlow. Like the functions described in §8.9,
these functions can be called with or without key words. For example,
view(hPic,Image,0.0,1.0);
will display on the window identified by hPic the array Image, taking a
value 0.0 to represent “black” and 1.0 to represent “white”. The same command
may be written more clearly as
view(hView:=hPic,array:=Image,black:=0.0,white:=1.0);
or with its arguments in a different order as
view(array:=Image, hView:=hPic,white:=1.0,black:=0.0);
Note, however, that the third of these options (i.e.
the arguments not in their natural order) can incur a significant computational
overhead, and is therefore discouraged except in circumstances where the
reordering improves readability.
Similarly, many of the functions can accept arguments with a
range of different types, and may have optional arguments. For example,
view(hView:=hPic,array:=Image);
will have the same effect as the earlier example,
except that the black and white levels are not specified by the user (the
default values are in fact 0.0 and 1.0, respectively). In contrast,
view(hView:=hPic,hDraw:=myDrawing);
will view a drawing previously created by the drawing
routines described in §11. DigiFlow determines the
action to be taken by the type of data it is provided with, hence
view(hPic,Image);
and
view(hPic,myDrawing);
would perform the same action as their counterparts
with key words. Using the key words, however, improves the clarity of the
resulting dfc
file by underlining the role played by each of the arguments.
DigiFlow has a vast array of predefined functions. Full
details of all of these are available via the interactive help system found
under Help: dfc Functions…
and at the button of
dialogs that make use of dfc
code.
The following subsections give an overview of the functions
available, but do not provide a complete list. In all cases the name of the
function is self-explanatory, although of course the parameters and return
value may need some explanation.
DigiFlow functions may be used with or without key words. If
key words are given, then the order of the arguments does not matter. However,
if keywords are not given, the arguments must be in the order stated here. For
example,
This := where(Image>0.5,1.0,0.0);
will set This to an array of zeroes and ones, depending on whether
the array Image
is greater than or less than 0.5. The same command may be written as
This := where(mask:=(Image>0.5),vTrue:=1.0,vFalse:=0.0);
or with its arguments in a different order as
This := where(vFalse:=0.0,vTrue:=1.0,mask:=(Image>0.5));
Note, however, that the third of these options (i.e.
the arguments not in their natural order) can incur a significant computational
overhead, and is therefore discouraged except in circumstances where the
reordering improves readability.
A complete list of all functions known to DigiFlow at time
of writing is given in §9.32.
9.1 Basic mathematical
functions
DigiFlow supports a full range of basic mathematical
functions. Some of these have more than one variant. For example, sin(..) returns the
sine of an angle specified in degrees, while sin_rad(..) expects the angle to be in radians.
Similarly for cos(..), tan(..), and their
inverses asin(..), acos(..) and atan(..). These are in
turn supported by degrees_from_radians(..) and radians_from_degrees(..).
Both natural and base ten logarithms are supported through ln(..) and log(..),
respectively, with the former’s inverse exp(..).
Other basic functions include abs(..), sign(..), sqrt(..), int(..), real(..) and not(..).
Additional transcendental functions include bessel(..), erf(..) and erfc(..).
round(..), floor(..)
For a more complete list, and further details on these functions,
refer to the dfc
function help facility within DigiFlow.
9.2 String
functions
The string functions bear some resemblance to those found in
some dialects of Basic. The list of possible functions include upper_case(..), lower_case(..), length(..), search_string(..), left_string(..), right_string(..) and mid_string(..).The maximum
length of a standard string is given by max_string_length(..); the functions noted here can be
applied to memos when longer strings are required.
Other string manipulation functions include remove_spaces(..) and scrunch_string(..) for creating
shorter strings with undesirable characters removed, while replace_hashes(..) allows hash
characters ("#")
in a string to be replaced by a number (useful when constructing file and
directory names). Values complying to dfc syntax may be retrieved from a
string using read_this(..), or dfc code in a string
may be executed with execute(..) or try_execute(..).
The command line used to start DigiFlow is available through
command_line_arguments(..).
There are also a set of more specialist string functions for
converting numeric data to strings. The simplest of these is make_string(..), which
provides Fortran-like control of the string formatting, while remove_trailing_zeros(..) can help
clean up a string.. More specialist functions include fit_as_text(..), which converts the result of a
least squares fit into a LaTeX-compatible attractive text string, and nice_number_string(..) that creates
a LaTeX-compatible attractive version of a number.
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.3 Array
functions
To supplement standard array access using syntax of the form
var[i0:i1:is],
and the constructor (make_array(..), make_like(..)) and
conditional (where(..)) functions,
DigiFlow provides other methods of accessing arrays such as extract(..), indirect(..), sample_values(..) and look_up_table(..). Creating an
array containing a row or column repeated is achieved through x_replicate(..) and y_replicate(..). Specialist
array constructors include x_index(..), y_index(..), z_index(..), t_index(..), identity_matrix(..), random_array(..) and gaussian_array(..).
Matrix support is provided through the likes of transpose(..), matrix_multiply(..), least_squares(..), eigen_system(..), eigen_values(..), solve_linear(..), solve_svd(..) and singular_value_decomposition(..). Other basic
manipulation functions include roll(..),
flip_horizontal(..), flip_vertical(..), rotate_clockwise(..) and rotate_anticlockwise(..).
In addition to the standard arithmetic operators (that
function on and between arrays in the obvious way), there are a special set of
functions that provide the possibility of combining arrays of different
dimensions. The cropped_
set of functions (cropped_add(..), cropped_sub(..), cropped_sub_reversed(..), cropped_mul(..), cropped_div(..), cropped_div_reversed(..), cropped_power(..), cropped_power_reversed(..) and cropped_assign(..)) perform the
indicated operation only on the portion of the arrays that overlap/intersect.
Simlarly, the wrapped_
set of functions (wrapped_add(..), wrapped_sub(..), wrapped_sub_reversed(..), wrapped_mul(..), wrapped_div(..), wrapped_div_reversed(..), wrapped_power(..), wrapped_power_reversed(..), wrapped_assign(..) and wrapped_extract(..)) perform the
indicated operation by wrapping the larger array around the smaller array.
Other array-specific functions include sort_array(..), which is an
array-specific version of sort(..)
9.4
Type manipulation functions
This group of functions has the ability to manipulate the
types and sizes of values.
The make_array(..) and make_like(..) functions are
particularly valuable for constructing and reshaping arrays, with make_list(..) playing the
same role for lists. The where(..) function
provides a convenient method of conditionally accepting values (a little like
an if
statement for arrays), while make_string(..) provides a
way of converting numeric data to a string using a particular format. At a more
primitive level, char(..) and ascii(..) work on a
single character basis. A read_data(..) statement in
conjunction with an end_data
statement provides a convenient method of entering arrays of data in-line in
place of the normal [value0, value1, …] syntax. (A related approach is used
for the drawing functions draw_begin_lineto(..), draw_begin_mark(..) and draw_begin_vector(..)).
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.5
Information functions
This group of functions returns structural information about
the value containing in a variable or expression. These include the type tests is_integer(..), is_real(..), is_numeric(..), is_string(..), is_array(..), is_list(..), is_compound(..), is_code(..),is_memo(..) and is_null(..). Other
special information functions include is_drawing(..), is_view(..), is_live_view(..) and is_running(..) to determine information out
specific objects. The function exists(..)
determines whether a variable of a specified name exists, while the functions x_size(..), y_size(..), z_size(..) and n_size(..) return size
information on an array. For compound variables, n_components(..) returns the number of subvariables
contained.
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.6 Variable
functions
In addition to being able to manipulate variables through
the assignment statement, DigiFlow provides set_variable(..), get_variable(..) and get_component(..) to create or retrieve variable
values based on string arguments. While the first two of these work directly on
the dfc
interpreter’s current context, the third recovers information from a compound
variable. The function component_names(..) can be used
to recover a list of names of components in a compound value, while exists(..) can be used
to determine if a given variable exists. (Note: exists(..) should not be used in code to be
compiled with compile(..).) The
functions set_global(..) and get_global(..) manipulate
the global (root) interpreter context, and should be used only with great care,
as should the functions set_configuration(..) and get_configuration(..).
The functions get_user_variables(..), get_local_variables(..) and get_file_variables(..) can provide a
snapshot (as a compound value) of the current state of variables in the
interpreter, while list_local_variables(..), list_user_variables(..), list_global_variables(..), list_system_variables(..) and list_components(..) recover the
names of all the relevant variables.
9.7 File handling
DigiFlow provides a variety of standard file functions for
handling input and output from a dfc file. As is common with many languages, a file handle
is provided by opening the file, and this handle must be used for all
subsequent access to the file. The file will be closed either when the close_file(..) command is
executed or the file becomes out of scope. A file becomes out of scope when the
execution unit it was opened in is terminated. For example, a file opened
within a function will be closed automatically when that function terminates.
Files are opened by open_file(..). A console window may be opened
either with open_file(..) or with open_console(..). The handle
returned by open_file(..) is then
passed to the other file manipulation functions write_file(..), write_array(..), read_file(..), read_line(..), read_array(..), flush_file(..) and close_file(..) (for a console, write_console(..), read_console(..) and close_console(..) may be used
instead).
Information about files may be obtained with file_details(..), is_file_local(..) and computer_for_file(..), while files
may be copied using copy_file(..) or copy_file_wait(..), moved with move_file(..), and deleted
using delete_file(..). The current
directory may be determined with current_directory(..), and changed by change_directory(..), while new
directories are created with create_directory(..) or removed by
destroy_directory(..). Note that
DigiFlow retains a current directory separately for each dfc code being run, as well as a
separate current directory for the main DigiFlow process. The DigiFlow
directory structure may be probed using start_directory(..) and digiflow_directory(..) with the variants start_directory_url(..) and digiflow_directory_url(..) providing an
alternative view of the path for networked drives. The name of the DigiFlow
executable itself can be determined from digiflow_executable(..).
One of the simplest ways of reading data from a file is with
read_array(..), although the
functions read_into_array(..) and read_table(..) provide an
alternative when only partial data exist (read_into_array(..)) or the data is of mixed types (read_table(..)).
Support for binary files is provided through open_binary_file(..), read_binary(..), write_binary(..), set_file_pointer(..) and set_file_end(..). A binary file
may be closed using close_file(..) as normal.
Support for files already in the file system includes copy_file(..), copy_file_wait(..), move_file(..) and delete_file(..). Information
about a file is obtained with file_details(..), while list_files(..) provides access to the contents of directories, with
greater detail available through list_file_details(..). Unless an absolute path
specification is given, the last two functions search relative to the current
path for the dfc
macro (see change_directory(..)). The same
can be achieved relative to the global DigiFlow path using list_files_global(..) and list_file_details_global(..) instead.
The function wait_for_file(..) provides an efficient way to wait
until a specific file exists.
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.8
Reading and writing images
In addition to accessing images through the built-in menu
options, DigiFlow command files may read and write images directly. Note that
this mechanism bypasses the normal file handling outlined in §9.2.
Functions that support the reading of images include read_image(..), read_image_when_ready(..), read_image_from_view(..) and read_image_details(..). In some
circumstances, asynchronous reading of images can substantially speed up the
processing. This can be achieved by using read_image_queue_create(..) to set up the
queue, read_image_queue(..) to recover
the next image from the queue, and read_image_queue_destroy(..) to close the
queue.
The function get_process_details(..) recovers what is known about how an
image was created in a form compatible with the process and dialog commands.
Conversely, the saving of images is achieved through write_image(..) and save_view(..). For a full
colour image, write_rgb_image(..) provides a
simplified interface. Rather than the direct write provided by write_image(..), images can
be queued for asynchronous writing using write_image_queue(..) and write_rgb_image_queue(..). An
indication of the number of images currently queued is obtained with n_waiting_write_image(..) and the wait
function wait_for_write_image_queue_empty(..).
Custom image readers may be constructed using dfc code and
installed in DigiFlow using add_image_reader_macro(..).
MetaFile support is provided through draw_on_emf(..) as well as the standard write_image(..).
Printer support is provided through ask_printer(..), print_view(..) and print_view_dialog(..) while Encapsulated PostScript generation
support includes export_to_eps(..) and export_to_simple_eps(..).
Turning on and off the reading and writing of DigiFlow image
archives (.dfa
files) is controlled by read_image_archive(..) and write_image_archive(..).
Some image formats support additional functionality, such as
jpeg_get_comments(..). The function
add_movie_reader(..) provides the
ability the add additional movie formats to DigiFlow.
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.9 Windows
and views
The image processing and plotting features of the DigiFlow
interpreter are enhanced by its ability to handle windows. In the terminology
used in DigiFlow, a window containing an image or other graphical object is
referred to as a view.
Basic handling of views is achieved through new_view(..) and close_view(..). Once created
by new_view(..), the handle
returned by this function is used to identify the view to be operated on. The
function view(..) has a large
number of variants for displaying a diverse range of data in an existing view,
while view_rotated(..) adds to it
the possibility of rotating the display. Alternatively, images may be loaded
directly into a new view using open_image(..) or open_image_when_ready(..). When a view contains a selector
specifying multiple images, animate_view(..) may be used
to control the replaying of the sequence.
Views with slightly different characteristics may also be
created using new_view_clean(..) and new_view_floating(..), while the
connection and disconnection of a window to an execution thread can be
controlled through view_connect_thread(..) and view_disconnect_thread(..),
respectively.
Icons may be superimposed on a view and manipulated with view_icon(..) and move_icon(..).
The currently active view may be identified using get_active_view(..), and its
contents retrieved as an image using get_view_as_image(..). Information about the type of view
can be recovered with get_view_class(..), while
information about a view-specific coordinate system can be read or set using view_get_coord_system(..) and view_set_coord_system(..).
Associated data for a view may be set with view_title(..) and view_time(..), while the
size and arrangement of views may be controlled using view_zoom(..), view_zoom_all(..), view_zoom_to_fit(..), view_zoom_all_to_fit(..), view_fit_to_zoom(..), view_fit_all_to_zoom(..), tile_views(..), cascade_views(..), maximise_view(..), minimise_view(..) and restore_view(..). The function
close_all_views(..) can be used
to close all views (or all views not currently involved in a process), and view_get_time(..) can recover
timing information set either by view_time(..) or as part of a DigiFlow process.
The appearance of a view may be controlled through view_colour(..), with the
associated colour schemes manipulated using colour_scheme(..), colour_scheme_from_image(..), add_colour_scheme(..) and delete_colour_scheme(..). A false
colour scheme may be toggled to greyscale using view_toggle_colour(..). Other functions affecting the
appearance in a view of a vector field include view_vector_colour(..), view_vector_scale(..), view_vector_spacing(..), view_scalar_colour(..) and view_scalar_range(..).
Specialised slave views are created and controlled using slave_view_3d(..), while plots
may be rendered in 3d using view_3d(..), render_3d(..), view_points_3d(..) or render_points_3d(..).
Details from a view may be sent to a printer of PostScript
file through print_view(..), print_view_dialog(..) and export_to_eps(..).
Arrangement of the main DigiFlow window is achieved through maximise_digiflow(..), minimise_digiflow(..) and restore_digiflow(..).
Icon-like images may be placed on, moved around and deleted
from views using view_icon(..), move_icon(..) and remove_icon(..), while view_counter(..) returns a
value that indicates if the contents of the view has changed.
For a more complete list, and further details on these
functions, refer to the .dfc
function help facility within DigiFlow.
9.10 Timing
functions
This group of functions returns timing information. The
group includes time(..), date(..) and process_time(..). Functions
for generating delays include start_timer(..), wait_for_timer(..) and sleep_for(..). For
high-precision timing, use time_interval(..).
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.11
Statistical functions
This group of functions returns statistical information.
Most of these functions have three variants: one that returns scalar statistics
for the entire array, one that returns an array of statistics collected along
the x direction, and a third that returns an array of
statistics collected in the y direction. Examples of
entire-array statistics include count(..),
sum(..), mean(..), rms(..), max_value(..), min_value(..). The
corresponding x direction statistic functions are x_count(..), x_sum(..), x_mean(..), x_rms(..), x_max_value(..), x_min_value(..) and the y direction statistic functions are y_count(..), y_sum(..), y_mean(..), y_rms(..), y_max_value(..), y_min_value(..). A subset of the radial (r_count(..), r_mean(..), r_sum(..)) and
azimuthal (theta_mean(..)) equivalents are
also provided.
The moment functions x_moment(..), y_moment(..), x_centroid(..) and y_centroid(..) all return arrays of data. The
location functions max_index_x(..), max_index_y(..), min_index_x(..) and min_index_y apply
to the entire array, while x_max_index(..), y_max_index(..), x_min_index(..) and y_min_index(..) return
arrays. In a similar vein, the function where_is(..) determines the indices where a
particular condition is satisfied.
Random number support is available through both scalar random_number(..) and array random_array(..) entry points,
while randomise(..) will reorder
an array or list, and gaussian_array(..) provides
normally distributed random numbers.
The histogram(..) function
allows binning of information, while sample_values(..) provides an efficient mechanism for
extracting data from predetermined locations in an array. The functions x_accumulate(..) and y_accumulate(..) accumulate
the contents of arrays, effectively integrating them in one direction from one
edge.
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.12
Image processing functions
Image processing functions allow basic manipulations of
array values in a manner that is of use for image processing operations. The
functions transpose(..), flip_horizontal(..), flip_vertical(..), rotate_clockwise(..) and rotate_anticlockwise(..) can be used
to re-orient an image, while rotate_image(..) allows for
more general rotations. Images may be translated using shift(..) or shift_interpolated(..), and their
resolution changed using rescale_image(..) or the more
sophisticated weighted interpolate_image(..).
Basic filter operations include filter_low_pass(..), filter_convolution(..), filter_min(..), filter_max(..), filter_median(..), filter_centile(..), filter_std_dev(..) and filter_geometric(..). These may be extended further
using the Fast Fourier Transform function fft_2d(..) and its inverse inverse_fft_2d(..).
The basic filters assume the edges of the image are
independent. However, sometimes it is more appropriate to consider the image as
one period of a periodic array. Support for this view is provided through filter_periodic_centile(..), filter_periodic_convolution(..), filter_periodic_geometric(..), filter_periodic_low_pass(..), filter_periodic_max(..), filter_periodic_median(..), filter_periodic_min(..) and filter_periodic_std_dev(..).
Variants on filter_min(..) and filter_max(..), that exclude the pixel itself, are available
through filter_min_neighbours(..) and filter_max_neighbours(..). These can be
particularly valuable for identifying turning points in an image.
Further information about the structure of an image is
available via contouring with contour_image(..), find_contour_start(..), pixel_contour(..) and smooth_contour(..). A contour may be resampled with resample_curve(..). A related
function, find_edge(..), uses
gradient information to identify the edge of a region. Alongside these, find_blobs(..) can determine
the properties of islands satisfying an intensity threshold, and fill_blobs(..) and fill_blob_list(..) can
flood-fill such entities. The function fractal_box_count(..) provides access to the Kolmogorov
capacity, while the related fractal_box_count_digimage(..) provides a
similar function that makes the calculation in the same way as DigImage.
Transitions within an array may be found conveniently with x_transition_index(..) or y_transition_index(..).
Colour space manipulation is available through rgb_from_bayer(..), bayer_from_rgb(..), hsi_from_rgb(..), hue_from_rgb(..), saturation_from_rgb(..), intensity_from_rgb(..), grey_from_rgb(..), red_from_rgb(..), green_from_rgb(..), blue_from_rgb(..), cyan_from_rgb(..), magenta_from_rgb(..), yellow_from_rgb(..), cmy_from_rgb(..), cmyk_from_rgb(..) and rgb_from_hsi(..).
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.13 Flow functions
The purpose of these functions is to help with the
post-processing of fluid flows. These include stream_line(..) and follow_optical_flow(..).
9.14 Coordinate functions
These functions provide access to the coordinate system
mechanism within DigiFlow.
At the simplest level x_index(..) and y_index(..) provide a convenient method of
generating arrays containing pixel indices, while x_index_world(..) and y_index_world(..) do the equivalent with world
coordinates. The more general functions world_coordinate(..) and pixel_coordinate(..) may be used to convert between
coordinate systems.
Coordinate systems may be created with coord_system_create(..) in
conjunction with coord_system_add_point(..) and coord_system_mapping(..). The default
coordinate system may be set using coord_system_set_default(..), and a
coordinate sytem can be removed with coord_system_destroy(..). The
available coordinate systems may be determined with coord_system_list(..) while information about an
individual coordinate system can be obtained with coord_system_destroy(..), coord_system_get_mapping(..), coord_system_get_points(..) and coord_system_units(..).
Once created, a coordinate system can be modified, thus
creating a new coordinate system using coord_system_apply_region(..),coord_system_translate(..) and coord_system_translate_pixel(..).
The definition of a coordinate system can also be written to
a dfc file with
coord_system_save(..).
In some cases, it can be desirable to create a mapping from
pixel to world coordinate systems. The functions coord_system_create_mapping_array(..) and coord_system_transform_array(..) support this.
The specialist function stereo_velocity_to_3d(..) provides
support for stereo PIV calculations.
View-specific coordinate information can be read or set
through view_get_coord_system(..) and view_set_coord_system(..).
Alongside the coordinate system creation is the ability to
create regions for use in the Sift
facility using region_create(..) and match_intensity_create(..). The regions
already defined can be determined with region_list(..) and the details of an individual
region are retrieved using get_region(..). Regions may
be removed from the list with region_destroy(..).
9.15
Bit-wise operations
It can be useful sometimes to operate on the individual bits
of integers as binary numbers. This functionality is provided through bit_and(..), bit_or(..), bit_eor(..), bit_not(..), bit_rotate(..), bit_test(..), bit_set(..), bit_clear(..) and bit_shift(..).
9.16 Camera
control
Camera control in DigiFlow dfc code is provided through two
different, complementary mechanisms. The first is via the process command to
invoke the corresponding items from the File menu. The second mechanism is
provided through a direct dfc
interface. To make use of this, first create a live view, either using the process interface,
ore more simply by a call to camera_live_view(..). If you then
wish to save the digitised images to a DigiFlow .dfm file, then first call camera_capture_file(..) to set up the
file, and camera_start_capture(..) to start the
capture process. Image saving capture may be terminated either when a specified
number of images have been captured, or a call is made to camera_stop_capture(..). During the
period while the video is being captured, the function camera_is_capturing(..) will return true. The live
view may be terminated by simply closing the associated view (camera_live_view(..) and camera_get_view(..) return the
necessary handle). A typical example of code to capture a sequence using this
interface is given below.
hView := camera_live_view();
sleep_for(10); # Wait until we are sure the camera has started
camera_capture_file("MyMovie.dfm");
camera_start_capture();
sleep_for(20); # capture period
ret := camera_stop_capture();
message("Frame rate achieved:"+ret.fpsAchieved);
close_view(hView);
For cameras that support full asynchronous triggering, camera_set_mode(..) may be used
to change from continuous acquisition to one-shot triggered mode. In the latter
case an image will only be acquired (and correspondingly written to any output
file) when an explicit trigger is sent. This trigger may be provided either by
external hardware (via the frame grabber card), or from dfc code through camera_trigger(..). The code example below illustrates
how to capture images on demand by the user clicking a button.
hView := camera_live_view();
sleep_for(10); # Wait until we are sure the camera has started
camera_capture_file("MyMovie.dfm");
camera_wait_for_capture_ready(); # Wait before
making async
camera_set_mode("oneshot");
camera_start_capture();
another := true;
while (another) {
camera_trigger();
another := ask_yesno("Capture another image?","Snap images",allowCancel:=false);
};
camera_stop_capture();
camera_set_mode("continuous");
sleep_for(5);
close_view(hView);
Of course the sleep_for(..) or wait_for_timer(..) functions may be used in place of
the user clicking a button to provide more precise but flexible timings.
The camera_wait_for_capture_ready(..) call is
necessary here to ensure that the capture file is set up properly before
switching to asynchronous mode. This is necessary because camera_capture_file(..) does not
itself initialise the capture file, but rather asks the video subsystem to do
so asynchronously as frames are processed by the system. In the first example
above the camera_start_capture(..) call
implicitly issued a camera_wait_for_capture_ready(..) call before
commencing the capture. However, in the second example, the code would stall if
we relied on this since camera_set_mode("oneshot") prevents any
more frames being processed except by calls to camera_trigger(..). We must therefore either do the wait
with camera_wait_for_capture_ready() before
making the camera asynchronous, or ensure the camera produces a few frames
using camera_trigger(..) between camera_set_mode("oneshot") and camera_start_capture(). The functions camera_frame_number(..) and camera_frames_captured(..) provide
additional functionality for monitoring the capture process.
Single frames may be grabbed directly from live video
through camera_grab(..) or camera_grab_last(..), while
individual lines or columns can be returned through camera_grab_line(..) and camera_grab_column(..), respectively.
In some circumstances it may be desirable to lock the
acquisition to the display rate of the computer monitor. To aid in this the directdraw_trigger(..) and directdraw_trigger_period(..) functions not
only handle the display, but also send a trigger to the camera. These can
interact with functions such as camera_set_sync_line(..), camera_set_strobe(..), camera_trigger(..), camera_wait_for_frame(..), camera_wait_for_sync(..), wait_for_capture(..), wait_for_preprocess(..).
Communications with the camera are possible for many
CameraLink cameras using camera_serial(..). The gain and
shutter speed can be controlled using camera_set_gain(..) and camera_shutter_speed(..),
respectively. The function camera_set_frame_rate(..) uses a
variety of techniques, dependent on camera type, to adjust the frame rate. This
should be issued prior to the corresponding camera_capture_file(..) if a
different capture rate is required. Capture through the default capture file is
aided by camera_save_cache(..) and camera_cache_file_name(..).
Where it can be adjusted, the black level of the camera is
set by camera_set_black(..). For some
cameras, the optimal black level depends on the shutter speed. In such cases, a
call to camera_optimal_black(..) may be used
from within camera_shutter_speed(..) to set the
black level.
The current settings for the camera can be established with camera_get_settings(..), and a
summary of these settings displayed on the status bar using camera_show_status(..).
The display of images can be controlled with camera_display_now(..) and camera_set_display_rate(..).
Other low-level framegrabber specific controls include camera_low_level(..), camera_gpout(..) and camera_override_sync(..).
Details of the camera may be found using camera_capabilities(..), and some of
these may be overridden through camera_override(..), while camera_get_settings(..) determines
key parameters controlling the camera. Persistent wrapping problems may
sometimes be solved through camera_set_frame_offset(..).
9.17
Array plotting functions
Array plotting functions allow data to be transferred into
an array in a manner similar to plotting.
Some of these functions are much more restrictive than the
drawing functions described in §11, but have their
use in manipulating images. Examples include scatter_to_array(..).
A three-dimensional iso-surface can be created from a
three-dimensional array using render_3d_isosurface(..).
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.18
Numerical functions
DigiFlow provides a variety of numerical functions that can
be used to for purposes ranging from the manipulation of images to numerical
solution of equations.
Linear algebra functions include identiy_matrix(..), matrix_multiply(..), solve_linear(..), solve_svd(..), singular_value_decomposition(..), least_squares(..), fit_expression(..), evaluate_expression(..), with fit_line(..) providing a
faster route to the fitting of a straight line. (The function fit_as_text(..) provides a
convenient method of producing LaTeX-like text from the output of fit_expression(..) or fit_line(..).)
More specialist fitting procedures are available for
one-dimensional data through fit_ellipse(..), fit_periodic(..) and evaluate_periodic(..), while for
two-dimensional data fit_spline_surface(..), b_spline_2d(..) and b_spline_2d_least_squares(..) are
available.
Spectral functions such as fft_row(..), fft_column(..), fft_2d(..) and fft_3d(..), and their inverses inverse_fft_row(..), inverse_fft_column(..), inverse_fft_2d(..), and inverse_fft_3d(..), are
complemented by power_spectrum_row(..), power_spectrum_column(..) and power_spectrum_2d(..).
Additionally, power_spectrum_1d(..) provides the
shell averaging of two-dimensional data to produce a one-dimensional spectrum.
For one-dimensional data, the maximum entropy method equivalents mem_spectrum_row(..) and mem_spectrum_column(..) are available.
Similarly, DigiFlow also provides spectral calculation of auto_correlation_2d(..), auto_correlation_row(..), auto_correlation_column(..) and cross_correlation_2d(..), cross_correlation_row(..), cross_correlation_column(..).
Root finding is supported through find_root_bisection(..) and find_root_secant(..).
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.19
Differential functions
Functions oriented at differential equations include the
calculation of derivatives through d_dx(..), d_dy(..), d2_dx2(..), d2_dy2(..), curl(..), div(..), grad(..), laplacian(..), and solution of the Poisson equation
with solve_poisson(..). Functions
aimed at supporting numerical solution of the equations include advect_2d_psi(..), upwind_value(..) and shallow_water(..). Direct
inversion of a gradient field is provided through inverse_gradient(..), while multigrid(..) provides a flexible route to
template-based equation solution and is used in the computation of density_from_gradient(..).
An example of the use of some of these functions can be
found in StreamFunctionVorticity.dfc.
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.20 Handling
threads
The DigiFlow interpreter has the ability to handle
multithreaded code, thus allowing improvements in performance on multiprocessor
machines, and apparent improvements in the time to first results.
Any piece of code may be started in its own thread using as_thread(..), while a
DigiFlow processing feature may be started in a separate thread with process_as_thread(..). Both of
these functions return a thread handle that may be used in is_running(..) to determine
if the thread is still running, or wait_for_end(..) to suspend execution until the
thread has finished running. The handle of a thread associated with a view may
be determined using thread_for_view(..). Execution of
a thread may be paused with pause_thread(..), restarted
with unpause_thread(..), or
terminated prematurely with kill_thread(..) or stop_view_thread(..). Delays and
synchronisation within a thread is achieved through sleep_for(..), start_timer(..) and wait_for_timer(..).
For complex processes (and experienced users), the priority
of individual threads may be adjusted with set_thread_priority(..), with the
matching get_thread_priority(..) recovering
the priority of a thread.
The function thread_set_stopping_time(..) can be used to specify how much
time is expected to elapse between an attempt to stop a thread using kill_thread(..) and it
actually stopping. Amongst other things, this sets the time delay between
requesting a window be closed and it actually closing. If this time is too
short, it is more likely that an error is thrown.
External processes may be started and controlled using issue_command(..).
Files containing dfc code may be set to run automatically upon their
creation by issuing autorun_file(..).
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
9.21 Web browsing
Basic functionality for controlling the Internet Explorer
web browser is available through www_action(..), www_browse(..) and www_exit(..). Note,
however, that default security settings means that the level of functionality
is greater when browsing to a http:// address rather than a file on your own
computer.
9.22 ftp
functions
Commercial versions of DigiFlow provide the user with a set
of ftp functions for transferring data to and from an ftp server. In
particular, ftp_open(..), ftp_close(..), ftp_current_directory(..), ftp_change_directory(..), ftp_create_directory(..), ftp_remove_directory(..), ftp_list_files(..), ftp_get_file(..), ftp_put_file(..), ftp_rename_file(..) and ftp_delete_file(..).
Related to this are the network functions get_ip_address(..) and get_mac_address(..).
Refer to the dfc
help for further details.
9.23
DirectDraw functions
DigiFlow provides a variety of functions using the Microsoft
DirectDraw interface in order to provide specialised synchronisation between
computer display and camera control. These functions include list_monitors(..) to provide
the necessary information in multi-monitor systems, directdraw_create(..) and directdraw_destroy(..) to initialise or destroy the
DirectDraw interface, directdraw_view(..) to set an
image to a flappable buffer, and directdraw_animate(..), directdraw_animate_period(..), directdraw_trigger(..) and directdraw_trigger_period(..) to switch
between multiple buffers and (for the ‘trigger’ variants) trigger camera
acquisition. The functions get_monitor(..) and list_monitors(..) are required
when dealing with multiple monitors on your system.
The following code segment illustrates a simplified
situation in a dual monitor system. The view identified by hView is located
on the monitor where the DirectDraw mechanism is to be used, Im0 and Im1 are the two
images to be displayed, nFlips
are the number of image changes, and nWait is the number of vertical blanking
periods to wait between each image change.
monitor := get_monitor(hView);
list := list_monitors();
if (search_string(monitor.name,"1")) {
# First monitor
guid := list.GUID0;
} elseif
(search_string(monitor.name,"2")) {
guid := list.GUID2;
} else
{
message("Selected "+monitor.name+", using default");
guid := "null";
};
nx := monitor.rect.right - monitor.rect.left + 1;
ny := monitor.rect.bottom - monitor.rect.top + 1;
ddraw := directdraw_create(2,hView,guid);
directdraw_view(ddraw,0,Im0,"greyscale");
directdraw_view(ddraw,1,Im1,"greyscale");
tFlips := directdraw_animate(ddraw,nFlips,nWait);
directdraw_destroy(ddraw);
9.24
Data acquisition functions
Some users find it convenient to control a data acquisition
card from within DigiFlow. Support is provided here for controlling PD2-MFx
cards from United Electronic Industries (http://www.uei.com).
These cards provide high-speed analog input and output and up to sixteen
digital input and output data lines. The design of the cards means that minimal
cpu load is imposed while doing analog input/output operations, thus allowing
the computer to focus on other data.
DigiFlow support for one of these cards is achieved first by
the call install_function_dll("DataAcquisition.dll","UEIDataAcquisition",true); before using uei_open(..) to open the
card. At the end of the session, uei_close(..) must be called to tidy up and release resources.
Note that DigiFlow can only access only one such card at a time.
Analog output is provided by the single command uei_analog_out(..), whereas
three commands – uei_analog_in_configure(..), uei_analog_range(..) and uei_analog_in(..) – are
necessary to provide the analog in functionality.
TTL-level digital input can be read with uei_digital_in(..), uei_digital_in_clear_events(..), uei_digital_in_configure(..), uei_digital_in_status(..) and uei_digital_in_wait(..). Similarly,
digital output is made available with uei_digital_out(..) and uei_digital_out_array(..).
Some models of the PD2-MFx card are provided with a
three-channel Intel Universal Counter Timer chip. This can be configured in
many different ways using the command set uei_counter_clear_events(..), uei_counter_configure(..), uei_counter_gate(..), uei_counter_mode(..), uei_counter_pulse(..), uei_counter_read(..), uei_counter_reset(..), uei_counter_status(..), uei_counter_wait(..) and uei_counter_write(..).
The low-level functions uei_get_configuration(..) and uei_set_configuration(..) provide some
additional functionality.
Built on top of these data acquisition and control functions
is a set of functions and macros specifically intended for the control and
monitoring of a high-precision rotating table. These functions are identified
through names beginning with turntable_.
Further details may be available on request.
9.25
Serial communications
Some laboratory equipment can be controlled and/or data read
through a protocol based on RS232 serial communications. To facilitate this,
DigiFlow provides a basic set of functions for this. In particular, serial_open(..) opens and
configures a communication port, while serial_close(..) releases this resource. Whilst
open, serial_write(..) and serial_read(..) allow data to
be transferred.
9.26
GhostScript functions
Although GhostScript does not form part of DigiFlow, if
DigiFlow detects that it is installed on your system then DigiFlow can make use
of GhostScript for converting PostScript files into raster images for
processing (or simply displaying). The ghost_script(..) function provides the simplest and
most direct support, giving access to the GhostScript interpreter and returning
resulting image in a rgb formatted array. More detailed control over the
interpreter is provided through ghostscript_start(..), ghostscript_execute(..), ghostscript_end(..), ghostscript_get_image(..), ghostscript_show_image(..) and ghostscript_get_output(..).
9.27
Particle tracking functions
Files produced by the particle tracking system in DigiFlow
necessarily have a different format from those of other features. While the
particle tracking menu provides a number of post-processing options, there will
be times when it is desirable to construct post-processing using dfc code. Support for
this is provided through ptv_open(..) and ptv_close(..) to access the
.dft particle
tracking files. Once opened, ptv_tracks(..) provides a
mechanism for enumerating the tracks of individual particles (i.e.,
assembling paths from the coordinate and linking information stored in the .dft files), and ptv_velocity(..) calculates
the velocities associated with the tracks. The functions ptv_tracks_compound(..) and ptv_velocity_compound(..) provide some
additional information in a different format. More specific information about
individual particles can be determined using ptv_read_particles(..), and a specific particle within
this located using ptv_particle_details(..).
9.28 Logging
DigiFlow includes code for helping track down problems,
either with DigiFlow code, or with user dfc files. The following group of
functions support this process by logging certain groups of activities. These
functions are intended primarily for the developer to help track down the cause
of any lingering bugs.
Key entry points are log_start(..), log_stop(..), log_message(..), log_allocated(..), log_memory(..), log_flush(..) and log_flush_every_time(..).
Normally these functions will only be used while seeking
technical support for DigiFlow.
The logging functions produce output into a file named DigiFlow.log. (Note
that when DigiFlow crashes, it will attempt to write as much diagnostic
information as possible to DigiFlow.log.)
For example, if log_start(..) is used for
levels 8, 9 and then, then this file contains entries such as
543 136295776 92 Allocate : $AddItem:New -
nTotal
544 136295880 472 Allocate : $AddItem:pItem -
nTotal
545 158924832 5242880 Allocate : CreateImage:RR
546 164233248 5242880 Allocate :
CreateValue$Kind:Value%AA
547 158924832 5242880 Deallocate: $DiscardImage:RR
547 147345992 92 Allocate : $AddItem:New -
lay0avg
548 147346096 472 Allocate : $AddItem:pItem -
lay0avg
549 147346584 128 Allocate :
CreateValue$Kind:Value%List
where the first column gives a sequence number, the
second a memory address, the third the size of the associated structure, the
fourth the action and the fifth an indication of where in DigiFlow the memory
was allocated. Here, nTotal
is a scalar variable created by a user dfc file, and lay0avg is an array read from an image.
Note that the image itself is created as item 545, then destroyed as 547. The
array is created as 546 and stored as lay0avg in 547 and 548.
If, subsequently, log_allocated(..) is called, then a block like that
below will be added to the log:
###############################################
# Currently allocated memory -- START
# current allocation =
###############################################
521 136310400 92 $AddItem:New - i_min
522 136310504 472 $AddItem:pItem - i_min
523 136310992 92 $AddItem:New - i_max
524 136311096 472 $AddItem:pItem - i_max
525 136311584 92 $AddItem:New - j_min
526 136311688 472 $AddItem:pItem - j_min
...
4285 148167192 472 $AddItem:pItem - k
4286 148167680 92 $AddItem:New - iFile
4287 148167784 472 $AddItem:pItem - iFile
4325 224133152 3672360 CreateValue$Kind:Value%AA
###############################################
# Currently allocated memory -- END
# current allocation =
###############################################
This block lists all memory that was allocated
following log_start(8); (and before log_stop(8);) that has been
allocated but not deallocated. Note that the sequence number (first column) is not
necessarily in order, but refers back to the numbers in the previous list. In
this case, most of the entries in the list are the direct result of the dfc file that was
running when it was created.
9.29
Registry functions
DigiFlow itself makes minimal use of the registry, but does
provide some access to it through the functions registry_list_keys(..), registry_get_value(..), registry_set_value(..) and registry_create_key(..).
9.30
Configuration and licence functions
During start-up, dfc code is responsible for some of the configuration of
DigiFlow. Advanced users may enhance this using functions such as add_menu_item(..), add_menu_separator(..), get_submenu(..), add_submenu(..), add_image_reader(..), add_image_writer(..), add_movie_reader(..), add_image_reader_macro(..), install_function_dll(..).
Information about the state of DigiFlow licensing is
obtained with is_digiflow_licensed(..) and digiflow_licence_type(..), while the
DigiFlow splash screen may be manipulated with show_splash(..) and hide_splash(..).
Some releases of DigiFlow are available compiled with more
than one compiler. Specific information about this is provided through compiler_supplier(..) and compiler_version(..). The date on
which the main digiflow.exe
was compiled is accessible through digiflow_build_date(..), with options
within this determined using is_debug(..) and is_openmp(..).
Information about the folder in which it is installed can be
determined using either digiflow_directory(..) or digiflow_directory_url(..), the latter
providing details of the machine on which DigiFlow resides if you are using a
mapped network drive. The folder in which DigiFlow was started can be
determined from start_directory(..) and start_directory_url(..).
The version of Windows on which DigiFlow is running can be
determined using windows_version(..).
DigiFlow’s use of resources can be monitored through system_load(..), memory_status(..) and memory_status_show(..), while an
attempt to free some resources is achieved with memory_tidy(..).
9.31
Miscellaneous functions
The equation of state for salt water is accessible through seawater_density(..).
The DigiFlow help system can be directed to a particular
section in a web browser using digiflow_help(..).
9.32 All
functions
The table below gives a list of the names all the operators,
functions and constants understood by DigiFlow, including any alternate
spellings.
!
"
#
&
()
*
*=
+
+=
-
-=
/
/=
0x
:=
<
<<>>
<=
<>
=
>
>=
?
?=
[]
{/
/}
{}
^
_!News
- latest
_!News
- old
_Input
streams
_LaTeX
_Output
streams
_Returning
images
_Simple
plot
abs
acos
acos_rad
add_color
add_color_scheme
add_colour
add_colour_scheme
add_image_reader
add_image_reader_macro
add_image_writer
add_menu_item
add_menu_separator
add_movie_reader
add_submenu
advect_2d_psi
allow_break
allow_query
and
animate_view
as_thread
asin
asin_rad
ask_directory
ask_directory_modeless
ask_file
ask_file_modeless
ask_image
ask_image_modeless
ask_integer
ask_integer_modeless
ask_list
ask_list_modeless
ask_printer
ask_real
ask_real_modeless
ask_string
ask_string_modeless
ask_yesno
ask_yesno_modeless
atan
atan_rad
auto_correlation_2d
auto_correlation_column
auto_correlation_row
autorun_file
b_spline_2d
b_spline_2d_least_squares
bayer_from_rgb
beep
bessel
bit_and
bit_clear
bit_eor
bit_not
bit_or
bit_rotate
bit_set
bit_shift
bit_test
blue_from_rgb
camera_cache_file_name
camera_capabilities
camera_capture_file
camera_display_now
camera_external_shutter_speed
camera_frame_number
camera_frames_captured
camera_get_settings
camera_get_view
camera_gpout
camera_grab
camera_grab_column
camera_grab_last
camera_grab_line
camera_is_capturing
camera_live_view
camera_low_level
camera_open_serial
camera_optimal_black
camera_override
camera_override_sync
camera_save_cache
camera_serial
camera_serial_online
camera_set_black
camera_set_display_rate
camera_set_frame_offset
camera_set_frame_rate
camera_set_frame_straddle
camera_set_gain
camera_set_mode
camera_set_strobe
camera_set_sync_line
camera_show_status
camera_shutter_speed
camera_start_capture
camera_start_frame_straddle
camera_stop_capture
camera_stop_frame_straddle
camera_switch_mode
camera_trigger
camera_wait_for_capture
camera_wait_for_capture_ready
camera_wait_for_frame
camera_wait_for_preprocess
camera_wait_for_sync
cascade_views
change_directory
char
close_all_views
close_console
close_file
close_view
cmy_from_rgb
cmyk_from_rgb
color_scheme
color_scheme_from_image
colour_scheme
colour_scheme_from_image
command_line_arguments
compile
compile_rp
compiler_supplier
compiler_version
component_names
computer_for_file
contour_image
convert_to_rp
coord_system_add_point
coord_system_apply_region
coord_system_create
coord_system_create_mapping_array
coord_system_destroy
coord_system_get_mapping
coord_system_get_points
coord_system_list
coord_system_mapping
coord_system_save
coord_system_set_default
coord_system_transform_array
coord_system_translate
coord_system_translate_pixel
coord_system_units
copy_file
copy_file_wait
cos
cos_rad
count
crash_digiflow
create_directory
cropped_add
cropped_assign
cropped_div
cropped_div_reversed
cropped_mul
cropped_power
cropped_power_reversed
cropped_sub
cropped_sub_reversed
cross_correlation_2d
cross_correlation_column
cross_correlation_row
curl
current_directory
cyan_from_rgb
d2_dx2
d2_dy2
d_dx
d_dy
date
degrees_from_radians
delete_color_scheme
delete_colour_scheme
delete_file
density_from_gradient
destroy_variable
dfc_as_latex
dialog
digiflow_build_date
digiflow_directory
digiflow_directory_url
digiflow_help
digiflow_licence
digiflow_licence_type
digiflow_site_licence
digiflow_version
directdraw_animate
directdraw_animate_period
directdraw_create
directdraw_destroy
directdraw_trigger
directdraw_trigger_period
directdraw_view
directdraw_wait
div
do_not_wait
draw_append_drawing
draw_arc
draw_begin_image
draw_begin_lineto
draw_begin_marks
draw_begin_vector
draw_bottom_axis
draw_circle
draw_clip_box
draw_colour_scheme
draw_create_key
draw_defaults
draw_destroy
draw_embed_drawing
draw_enable_latex
draw_end
draw_fill_color
draw_fill_colour
draw_font
draw_get_axes
draw_get_font_height
draw_get_status
draw_group_begin
draw_group_end
draw_image
draw_image_scale
draw_image_scale_vertical
draw_install_latex_macro
draw_key_entry
draw_left_axis
draw_line
draw_line_color
draw_line_colour
draw_line_style
draw_line_width
draw_lineto
draw_mark
draw_mark_size
draw_mark_type
draw_move
draw_no_fill
draw_on_array
draw_on_emf
draw_on_file
draw_on_view
draw_polygon
draw_rectangle
draw_restore_state
draw_right_axis
draw_save_state
draw_set_axes
draw_set_base_scale
draw_set_size
draw_skip_points
draw_start
draw_text
draw_text_color
draw_text_colour
draw_top_axis
draw_user_line_style
draw_vector
draw_vector_scale
draw_vector_scale_vertical
draw_x_axis
draw_y_axis
dye_ideal
dye_red_fiesta
eigen_system
eigen_values
else
elseif
enable_timing
end
end_data
eor
erf
erfc
evaluate_expression
evaluate_periodic
execute
exists
exit
exit_digiflow
exp
export_to_eps
export_to_simple_eps
extract
false
fft_2d
fft_3d
fft_column
fft_row
file_details
fill_blob_list
fill_blobs
filter_centile
filter_convolution
filter_geometric
filter_low_pass
filter_max
filter_max_neighbours
filter_median
filter_min
filter_min_neighbours
filter_periodic_centile
filter_periodic_convolution
filter_periodic_geometric
filter_periodic_low_pass
filter_periodic_max
filter_periodic_median
filter_periodic_min
filter_periodic_std_dev
filter_std_dev
find_blobs
find_contour_start
find_edge
find_root_bisection
find_root_secant
fit_as_text
fit_ellipse
fit_expression
fit_image_b_spline
fit_line
fit_periodic
fit_spline_surface
flip_horizontal
flip_vertical
floor
flush_file
follow_optical_flow
for
fractal_box_count
fractal_box_count_digimage
from
ftp_change_directory
ftp_close
ftp_create_directory
ftp_current_directory
ftp_delete_file
ftp_get_file
ftp_list_files
ftp_open
ftp_put_file
ftp_remove_directory
ftp_rename_file
function
function_help
gaussian_noise
get_active_view
get_component
get_configuration
get_dfc_path
get_dialog_response
get_file_variables
get_global
get_image
get_ip_address
get_key
get_local_variables
get_mac_address
get_monitor
get_mouse_box
get_mouse_click
get_mouse_line
get_mouse_position
get_mouse_rect
get_process_details
get_region
get_submenu
get_user_variables
get_variable
get_view_as_image
get_view_class
ghostscript
ghostscript_end
ghostscript_execute
ghostscript_get_image
ghostscript_get_output
ghostscript_show_image
ghostscript_start
grad
green_from_rgb
grey_from_rgb
hide_splash
histogram
hsi_from_rgb
hue_from_rgb
identity_matrix
if
ifelse
in_parallel
include
indirect
install_function_dll
int
intensity_from_rgb
interpolate_image
inverse_fft_2d
inverse_fft_3d
inverse_fft_column
inverse_fft_row
inverse_gradient
is_array
is_code
is_compound
is_debug
is_digiflow_licenced
is_digiflow_licensed
is_drawing
is_file_local
is_integer
is_list
is_live_view
is_memo
is_null
is_numeric
is_openmp
is_parallel
is_real
is_running
is_string
is_view
issue_command
jpeg_get_comments
kill_thread
laplacian
least_squares
left_string
length
list_components
list_file_details
list_files
list_files_global
list_global_variables
list_local_variables
list_monitors
list_names
list_system_variables
list_user_variables
ln
log
log_allocated
log_flush
log_flush_every_time
log_memory
log_message
log_start
log_stop
look_up_table
lower_case
magenta_from_rgb
make_array
make_like
make_list
make_string
map_cartesian_to_polar
map_polar_to_cartesian
match_intensity_create
matrix_multiply
max
max_index_x
max_index_y
max_string_length
max_value
maximise_digiflow
maximise_view
maximize_digiflow
maximize_view
mean
mem_spectrum_column
mem_spectrum_row
memory_status
memory_tidy
message
message_modeless
mid_string
min
min_index_x
min_index_y
min_value
minimise_digiflow
minimise_view
minimize_digiflow
minimize_view
mod
mouse_get_mode
mouse_set_mode
move_file
move_icon
multigrid
n_components
n_size
n_waiting_write_image
new_line
new_view
new_view_clean
new_view_floating
nice_number
nice_number_string
not
null
open_binary_file
open_console
open_file
open_image
open_image_when_ready
or
pack_time
pause_thread
pi
pixel_contour
pixel_coordinate
plot
plot_axes
plot_axis_type
plot_destroy
plot_drawing
plot_fit
plot_get_state
plot_image
plot_line
plot_new
plot_titles
plot_update_view
plot_vectors
plot_view_handle
power_spectrum_1d
power_spectrum_2d
power_spectrum_column
power_spectrum_row
print_view
print_view_dialog
process
process_as_thread
process_time
ptv_close
ptv_open
ptv_particle_details
ptv_read_particles
ptv_tracks
ptv_tracks_compound
ptv_velocity
ptv_velocity_compound
quit
r_count
r_mean
r_sum
radians_from_degrees
random_array
random_number
randomise
read_array
read_binary
read_compound_image
read_console
read_data
read_file
read_image
read_image_archive
read_image_details
read_image_queue
read_image_queue_create
read_image_queue_destroy
read_image_from_view
read_image_when_ready
read_into_array
read_line
read_table
real
red_from_rgb
region_create
region_destroy
region_list
registry_create_key
registry_get_value
registry_list_keys
registry_set_value
remove_icon
remove_spaces
remove_trailing_zeros
render_3d
render_3d_isosurface
render_points_3d
replace_hashes
replace_values
resample_curve
rescale_image
restore_digiflow
restore_view
reverse_polish
rgb_from_bayer
rgb_from_hsi
rgb_from_image
right_string
rms
roll
rotate_anticlockwise
rotate_clockwise
rotate_image
round
sample_values
saturation_from_rgb
save_view
scatter_to_array
scrunch_string
search_string
seawater_density
serial_close
serial_open
serial_read
serial_write
set_configuration
set_dfc_path
set_dialog_response
set_file_end
set_file_pointer
set_global
set_variable
shallow_water
shift
shift_interpolated
show_memory_status
sign
sin
sin_rad
singular_value_decomposition
slave_view_3d
sleep_for
smooth_contour
solve_linear
solve_poisson
solve_svd
sort
sort_array
sort_index
sqrt
start_directory
start_directory_url
start_timer
status_bar_message
step
stereo_velocity_to_3d
stop_view_thread
stream_function
streamline
sum
system_load
t_index
t_size
tan
tan_rad
theta_mean
thread_for_view
thread_set_stopping_time
tile_views
time
time_interval
to
trace
transpose
true
try_execute
try_include
turntable_angle
turntable_average_output
turntable_ctrl
turntable_current_speed
turntable_enable
turntable_filter_low_pass
turntable_filter_median
turntable_fourier
turntable_get_variable
turntable_heart_beat
turntable_output
turntable_record
turntable_set_speed
turntable_set_variable
turntable_state
turntable_status_bar
turntable_stop
turntable_target_speed
turntable_update_base
turntable_update_calibration
turntable_update_waveform
turntable_varying_speed
turntable_wait
turntable_where
uei_analog_in
uei_analog_in_configure
uei_analog_in_range
uei_analog_out
uei_analog_start
uei_close
uei_counter_clear_events
uei_counter_configure
uei_counter_gate
uei_counter_mode
uei_counter_pulse
uei_counter_read
uei_counter_reset
uei_counter_status
uei_counter_wait
uei_counter_write
uei_digital_in
uei_digital_in_clear_events
uei_digital_in_configure
uei_digital_in_status
uei_digital_in_wait
uei_digital_out
uei_digital_out_array
uei_get_configuration
uei_open
uei_set_configuration
unpack_time
unpause_thread
upper_case
view
view_3d
view_color
view_colour
view_connect_thread
view_counter
view_disconnect_thread
view_fit_all_to_zoom
view_fit_to_zoom
view_get_coord_system
view_get_time
view_icon
view_live
view_points_3d
view_rgb
view_rotated
view_scalar_colour
view_scalar_range
view_set_coord_system
view_time
view_title
view_toggle_color
view_toggle_colour
view_variables
view_vector_colour
view_vector_remove_mean
view_vector_scale
view_vector_spacing
view_vectors
view_zoom
view_zoom_all
view_zoom_all_to_fit
view_zoom_to_fit
wait_for_end
wait_for_ever
wait_for_file
wait_for_timer
wait_for_write_image_queue_empty
where
where_is
while
window_from
windows_version
world_coordinate
wrapped_add
wrapped_assign
wrapped_div
wrapped_div_reversed
wrapped_extract
wrapped_mul
wrapped_power
wrapped_power_reversed
wrapped_sub
wrapped_sub_reversed
write_array
write_binary
write_console
write_file
write_image
write_image_archive
write_image_queue
write_integer_array
write_rgb_image
write_rgb_image_queue
write_thesis
www_action
www_browse
www_exit
x_accumulate
x_centroid
x_count
x_index
x_index_pixel
x_index_world
x_max_index
x_max_value
x_mean
x_min_index
x_min_value
x_moment
x_replicate
x_rms
x_size
x_sum
x_transition_index
xor
y_accumulate
y_centroid
y_count
y_index
y_index_pixel
y_index_world
y_max_index
y_max_value
y_mean
y_min_index
y_min_value
y_moment
y_replicate
y_rms
y_size
y_sum
y_transition_index
yellow_from_rgb
z_index
z_size
10 Macros
The full power of DigiFlow is released through its ability
to run macros in the form of DigiFlow command files (more frequently referred
to as dfc files
or dfc code) to
automate complex or repetitive tasks. This section supplements the discussion
of the basic
10.1
DigiFlow command files
DigiFlow command files are simple text files that contain
code that is interpreted and executed by the DigiFlow interpreter. The language
used by this interpreter is a simple superset of that described already in this
section, with the addition of commands to invoke specific DigiFlow processes by
mimicking the functionality of the user-interface and process chaining ability
(see §7).
It is recommended that the default dfc extension be used for all DigiFlow
command files. This will not only ensure that the command files are visible to the
Run Code dialog (see §5.1.2), but also that
double-clicking on a dfc
file in Windows Explorer, or dragging a dfc file to DigiFlow, will ensure that
it is run correctly.
10.1.1
Running processes
The basic command for running a DigiFlow process from dfc code is
process dlg;
where dlg is a compound
variable containing the responses for the dialog associated with that menu item
and the name of the process to be run. This is best illustrated by example.
To compute the arithmetic time average of a movie test.dfm and store the
result in ave.dfi,
we may construct the following dfc
code:
dlg.Input := "test.dfm";
dlg.Output := "ave.pic";
dlg.Kind := "Arithmetic";
dlg.process := "Analyse_TimeAverage"
process dlg;
or equivalently using the compound variable constructor
= .. ?,
dlg := =
Input := "test.dfm";
Output := "ave.pic";
Kind := "Arithmetic";
process := "Analyse_TimeAverage";
?;
process dlg;
In this example, the variable dlg is used to store the dialog
responses that are required for the Analyse_TimeAverage process (see §5.6.1.1).
The dialog responses have been stored in the form of a compound variable (see §8.2.2).
Typically, a process requires a number of mandatory
responses, and may also accept a variety of optional responses. Here we have
defined only the mandatory input, output and average type responses. If no
errors are detected, the interface uses these values to initialise the control
structures for the averaging process, and then starts the averaging.
Although not used in the above examples, the process command
has a return value that contains information about the final state of the
process. For most processes, the return value is a compound value that contains
things like the final image computed and the handle(s) of any views left open
by the process. In the above example, if
ret := process dlg;
then the variable ret contains components .hOutput, the
handle of the view left open, .imgOutput, a copy of the image created by the time
average, and .process,
which is a copy of the entry value (here "Analyse_TimeAverage"). The
simplest way of determining the contents of the return value is to make a call
to view_variables(..) after
executing process.
If no assignment is made of the return value then this information is simply
discarded.
By default, processes are run in a separate thread from the
interpreter handling the dfc
code, but the execution of the dfc
code is suspended until the execution of the process is complete. This
behaviour may be modified by starting the process using
thread_id
:= process_as_thread dlg;
(dlg must always contains the .process declaration).
When started in this way, control is returned to the dfc code as soon as the dlg variable has been executed to start the process. The dfc code is then free
to start other processes or make other computations. However, any code that
relies on an output created by the command started in
this manner must execute wait_for_end(thread_id);
or at least check is_running(thread_id)
prior to making use of this output. See §9.20 for
further information on threads. Note if process_as_thread is used, then the
return value available with process
is automatically discarded and is not available to the calling dfc code.
For each of the processes within DigiFlow that may be
accessed by this method. The easiest way of obtaining this list is to run the
process interactively, then enter the Dialog responses facility described in §5.2.9. This gives a list of the values used, including
any relevant optional ones.
10.1.2
Control of input streams
Input streams, such as that represented by dlg.Input in the
previous section, may be either a single file (which may contain either a
single image or a movie of images), a series (with a varying numeric part
represented by one or more hash (#) characters, or a collection of
images. For a macro, a collection is typically specified using wild cards. The
wild card for a single character is either a question mark (?) or percentage
symbol (%),
whereas an asterisk (*)
or dollar symbol ($)
represents an arbitrary number of characters. The reason why there are two
symbols for each type of wild card stems from the way Windows interprets wild
cards immediately when using an open or save file dialog. Note that it is more
efficient to utilise the numeric substitution character (#) than wild
cards, and that numeric substitution can cope with a much larger number of
files.
The input streams can be modified in a number of ways, just
as they could through interactive use of DigiFlow. For most streams (those with
a Sift button),
aspects of the stream such as the timing and region of interest can be changed.
If the image source is a full colour image, then the Colour component to be processed may be
selected. In each case, the additional control is optional and is achieved by
appending further details to the name of the associated control. For example,
to select the green component of the full colour image MyPic.bmp for dlg.Input, then the lines
dlg.Input := "MyPic.bmp";
dlg.Input_Component := "green";
should be included in the dfc code.
The various controls available for input streams are
discussed below.
10.1.2.1 Folder for input stream
By default, if the file name specified for the input stream
does not contain a path component, then the stream will be taken from the
current folder (directory). If you wish to specify a different folder without
including it in the file name, then _Folder may be appended to the input
stream name and set to a string value specifying the folder required.
10.1.2.2 Archive file for
input streams
If available, .dfa
archive files can be useful as they both act as a collection point for
sequences of files and store additional information for file formats that
cannot store this internally. Appending _Options.UseArchive to the input stream
specifier allows the logical true
or false to
specify whether or not DigiFlow searches for a .dfa file when processing an input image
stream. If true
and an archive is found, then the information contained in it is merged with
that found in the image files themselves.
10.1.2.3 Displaying input
Normally it is desirable to show the input streams on the
display as the process takes place. However, in some cases it may be desirable
to suppress this. Control of whether or not input is displayed is achieved by
appending _Options.Display
to the corresponding input name. The resulting logical variable will then
display the input if true,
or suppress it if false.
If not specified, then the input stream will normally be displayed.
10.1.2.4 Colour component
The colour component input is applicable only to source
streams providing true colour images (e.g. 24 bit .bmp files). The
control is accessed by appending _Options.Component to the corresponding
input name. For example, if This.Experiment is set to a full colour image, then This.Experiment_Options.Component
provides selection of the colour component, as detailed in the following table.
Here, stream represents the base name of the input
stream (e.g. This.Experiment
in the above example).
|
stream_Options.Component :=
|
Description
|
|
"RGB"
|
Returns a three-plane full colour image. Note that some
DigiFlow options will only process the first (red) plane when presented with
a full colour image.
|
|
"mono"
|
Return the best monochrome version of the image.
|
|
"red"
|
Return the red component of the image in RGB space.
|
|
"green"
|
Return the green component of the image in RGB space.
|
|
"blue"
|
Return the blue component of the image in RGB space.
|
|
"hue"
|
Return the hue (colour) of the image, in
Hue/Saturation/Intensity space.
|
|
"saturation"
|
Return the saturation (purity of the colour) of the image, in
Hue/Saturation/Intensity space.
|
|
"intensity"
|
Return the intensity of the image, in Hue/Saturation/Intensity
space.
|
|
"cyan"
|
Return the cyan component of the image in CMY space.
|
|
"magenta"
|
Return the magenta component of the image in CMY space.
|
|
"yellow"
|
Return the yellow component of the image in CMY space.
|
|
"black"
|
Return the black component of the image in CMYK space.
|
|
"grey"
|
Return the equivalent grey level.
|
|
"mean"
|
Return the mean of the three RGB components.
|
|
"max"
|
Return the maximum of the three RGB components.
|
|
"min"
|
Return the minimum of the three RGB components.
|
Consult §4.1 for details on the
relationship between the returned value and the individual red, green and blue
colour components.
10.1.2.5 Timing control
For input streams having a Timings button, the timing details may
be set by appending _Time
to the corresponding input name. This new variable is a compound variable that
provides a number of ways of controlling the timings. For example, if dlg.Input
controls an input stream, then dlg.Input_Time.ToStep controls the last frame to be
processed.
The timings may be specified in terms of either frames or
seconds. If both are specified, the frames version takes precedence. Details of
both methods of control are given below. Note that you need specify only those
controls you wish to change from their defaults: the default action is to
process every frame of the input stream.
|
Variable
|
Description
|
|
stream_Time.FromStep
|
Select the first frame to be processed.
|
|
stream_Time.ToStep
|
Select the last frame to be processed.
|
|
stream_Time.StepCount
|
The number of frames to be processed. This has priority over _Time.ToStep.
|
|
stream_Time.StepBy
|
The spacing of the frames to be processed.
|
|
stream_Time.FromTime
|
Select the start time for the sequence. This is rounded to the
nearest frame.
|
|
stream_Time.ToTime
|
Select the end time for the sequence. This is rounded to the
nearest frame.
|
|
stream_Time.TimeStep
|
The time step for the sequence. This is rounded to the nearest
frame.
|
|
stream_Time.TimeStepFile
|
The interval between the frames in the sequence. This is ignored
for file formats that store time information, but is used for file formats (e.g.
sequences of .bmp
files) that do not store such information.
|
|
|
|
10.1.2.6 Selecting regions
It is often desirable to select only a part of an image for
processing. This is achieved through the specification of a region by appending
_Region to
the corresponding input name. This new variable is a compound variable that
provides a number of ways of controlling the region. For example, if dlg.Input controls
an input stream, then dlg.Input_Region.xMin
sets the left-hand side of the region. The table below summarises the available
options.
|
Variable
|
Description
|
|
stream_Region.Kind
|
Select the type of region. This is a string variable that
should be set to one of:
"All" Indicates
that all the input stream should be used.
"Conform" Indicates
that a region conforming to that of the master stream should be used.
This option is not available for streams that are the master. Typically, a
given process will have only one master stream, and this will be the first
stream in the dialog box.
"PixelRect" Indicates
that a rectangle (specified in pixel coordinates) will be used. Values must
be specified for the _Region.xMin,
_Region.xMax,
_Region.yMin
and _Region.yMax
variables.
"Named" Indicates
that a named region should be used. The name must be specified for the _Region.Name
variable.
|
|
stream_Region.xMin
|
Must be specified when _Region.Kind is "PixelRect". Specifies the
left-hand side of the pixel rectangle defining the region.
|
|
stream_Region.xMax
|
Must be specified when _Region.Kind is "PixelRect". Specifies the
right-hand side of the pixel rectangle defining the region.
|
|
stream_Region.yMin
|
Must be specified when _Region.Kind is "PixelRect". Specifies the
bottom of the pixel rectangle defining the region.
|
|
stream_Region.yMax
|
Must be specified when _Region.Kind is “PixelRect”.
Specifies the top of the pixel rectangle defining the region.
|
|
stream_Region.Name
|
Must be specified when _Region.Kind is "Named". Specifies the name of
the previously saved region.
|
10.1.2.7 Matching
intensities in input streams
As described in §4.3.3, it can
be necessary to adjust the intensities of images on an image-by-image basis in
order to match their intensities to a reference level. This is achieved through
the specification of a Match Intensity by appending _MatchIntensity to the corresponding
input name. This new variable is a compound variable that provides a number of
ways of controlling the intensity matching. For example, if dlg.Input
controls an input stream, then dlg.Input_MatchIntensity.Name sets the intensity matching
to a previously named scheme. The table below summarises the available options.
|
Variable
|
Description
|
|
stream_MatchIntensity.Kind
|
Optional variable that select the type of intensity matching.
This is a string variable that should be set to one of:
"None" Indicates
that no intensity matching will be used..
"Local" Indicates
that the settings are defined locally. Values must be specified for _MatchIntensity.xMinA,
_MatchIntensity.xMaxA,
_MatchIntensity.yMinA,
_MatchIntensity.yMaxA,
_MatchIntensity.xMinB,
_MatchIntensity.xMaxB,
_MatchIntensity.yMinB,
_MatchIntensity.yMaxB
"Named" Indicates
that a named setting should be used. The name must be specified for the _MatchIntensity.Name
variable.
If this variable is not specified, but _MatchIntensity.xMinA
is, then "Local"
will be assumed. Similarly, if this variable is not specified, but _MatchIntensity.Name
is, then "Named"
is assumed.
|
|
stream_MatchIntensity.xMinA
|
The left-hand edge of region A.
|
|
stream_MatchIntensity.xMaxA
|
The right-hand edge of region A.
|
|
stream_MatchIntensity.yMinA
|
The bottom edge of region A.
|
|
stream_MatchIntensity.yMaxA
|
The top edge of region A.
|
|
stream_MatchIntensity.xMinB
|
The left-hand edge of region B.
|
|
stream_MatchIntensity.xMaxB
|
The right-hand edge of region B.
|
|
stream_MatchIntensity.yMinB
|
The bottom edge of region B.
|
|
stream_MatchIntensity.yMaxB
|
The top edge of region B.
|
|
stream_MatchIntensity.IntensityA
|
If specified, then this gives the reference intensity for
region A. If not specified, then the reference intensity is determined from
the first image to be processed.
|
|
stream_MatchIntensity.IntensityB
|
If specified, then this gives the reference intensity for
region B. If not specified, then the reference intensity is determined from
the first image to be processed.
|
|
stream_MatchIntensity.Name
|
If specified, then this string gives the name of the match
intensity scheme to use.
|
10.1.2.8 Waiting for input
streams
In some cases, the input stream will not exist when a
process is started. DigiFlow allows the possibility of the process waiting for
the input stream to come into existence through some other mechanism (e.g.,
being created or copied by an external program or the user) rather than simply
throwing an error. The table below summarises the possible actions.
|
Variable
|
Description
|
|
stream_Options.WaitFor
|
Determines the time DigiFlow will wait for the input stream to
be created, if it does not exist already. A numeric (floating point or
integer) value should be assigned to this variable. A zero or negative value
implies no waiting, while a positive value gives the timeout period for the
stream.
|
10.1.3
Control of output streams
In a similar way to the ability to modify input stream
timing, colour component, etc., some aspects of the output streams may
also be modified. The following subsections detail the available controls.
10.1.3.1 Folder for output
streams
By default, if the file name specified for the output stream
does not contain a path component, then the stream will be taken from the
current folder (directory). If you wish to specify a different folder without
including it in the file name, then _Folder may be appended to the output
stream name and set to a string value specifying the folder required.
10.1.3.2 Archive file for
output streams
For many users, it is desirable to generate .dfa archive files
that both act as a collection point for sequences of files and store additional
information for file formats that cannot store this internally. Appending _Options.UseArchive
to the output stream specifier allows the logical true or false to specify whether or not the .dfa file is
generated.
10.1.3.3 Displaying output
Normally it is desirable to show the output streams on the
display as the process takes place. However, in some cases it may be desirable
to suppress this. Control of whether or not output is displayed is achieved by
appending _Options.Display
to the corresponding output name. The resulting logical variable will then
display the output if true,
or suppress it if false.
If not specified, then the output stream will normally be displayed.
10.1.3.4 Output stream colour
The colour scheme used for an output stream may be set by
appending _Options.Colour
to the name of the stream, and specifying a colour scheme, either as the name
of the scheme, or as an array of RGB colour values.
|
Variable
|
Description
|
|
stream_Options.Colour := "single cycle";
|
Specify a named colour scheme for this output stream.
|
|
stream_Options.Colour := my_array ;
|
Specify the colour scheme as an array of colour values. The
array should contain at least 256´3
elements, the first index corresponding to an 8-bit intensity, and the second
to the colour component in the order Red, Green, Blue. Each element of the
array should be scaled between 0.0 and 1.0.
|
|
stream_Options.Color :=
"single
cycle";
|
Identical to the above description with the UK spelling of colour.
|
|
stream_Options.Color := my_array;
|
Identical to the above description with the UK spelling of colour.
|
Colour scheme information may also be specified
simultaneously for all output streams by omitting the stream_Options prefix.
|
Variable
|
Description
|
|
Colour := "single cycle";
|
Specify a named colour scheme for all output streams.
|
|
Colour := my_array;
|
Specify the colour scheme as an array of colour values. The
array should contain at least 256´3
elements, the first index corresponding to an 8-bit intensity, and the second
to the colour component in the order Red, Green, Blue. Each element of the
array should be scaled between 0.0 and 1.0.
|
|
Color := "single cycle";
|
Identical to the above description with the UK spelling of colour.
|
|
Color := my_array;
|
Identical to the above description with the UK spelling of colour.
|
If both the stream_Options.Colour
and Colour
variants are used for a given output stream, then the stream_Options.Colour
variant has priority. Similarly, if both the UK and US spellings of colour are
used, then the UK spelling has priority.
For output streams that allow full (true) colour images,
whether or not one is saved may be controlled by setting the logical _Options.TrueColour.
10.1.3.5 First index
The first index to be used in naming the files in an output
sequence may be specified by appending _Options.FirstIndex to the name of the
stream and specifying an integer value. The default value is zero.
10.1.3.6 Output stream bit depth
The bit depth used for an output stream may be set (where
the file format allows) by appending _Options.nBits to the name of the
stream, and specifying the bit depth as an integer.
10.1.3.7 Output stream
compression
The compression setting used for an output stream may be set
(where the file format allows) by appending _Options.Compression to the name of the
stream, and specifying an integer value. A value of zero turns off compression,
while positive values give compression (how many levels of compression are
available depend on the image format).
10.1.3.8 Output stream quality
For output formats using a lossy compression scheme (e.g.
.jpg files), it
is possible to specify the quality of the resulting image. There will, of
course, be a trade-off between the quality and the degree of compression.
Access to the quality control is provided by appending _Options.Quality to the name of the
stream. This control takes a string value which is normally one of "Default",
"Fast",
"Accurate",
"Superb",
"Good",
"Normal",
"Average"
or "Low".
10.1.3.9 Output stream resampling
When the .dfi
image format is selected, it is possible to rescale the output stream before it
is saved and then reverse this rescaling when the image is subsequently read
in. Typically this option is used to reduce the resolution of the saved image,
but maintain its size by interpolating back to the original size before using
the image again. Overall control of this is provided by appending _Options.Resample
to the name of the output stream and specifying one of "none", "source" or "local".
The first of these turns off resampling (default), whereas the second causes
any resampling parameters to be inherited from the source image stream or the
process that is creating the images, as appropriate. The "local" option provides direct
control over the resampling through the additional keys described below.
The resolution of the saved image is controlled by appending
_Options.ResampleFactor
to the name of the output stream and specifying a floating point value for the
relative resolution of the saved image. For example, a value of 0.5 will cause
the saved image to have only ¼ of the number of pixels of the original in the
file, but through interpolation the missing pixels are reconstructed when the
image is read in again. The method of interpolation may also be controlled
using _Options.ResampleInterpolation
with a value of "none"
for no interpolation (replicating pixels), "linear" for bi-linear
interpolation and "cubic"
for bi-cubic interpolation.
10.1.3.10 Comments in output
streams
For output file formats that support comments, a comment may
be specified by appending _Options.Comments
to the name of the output stream and specifying the comment as a character
string.
10.1.3.11 Leaving output
streams visible
When DigiFlow is run interactively, the principle output
streams are opened and left visible at the end of a process. This behaviour,
however, may not be desirable when running DigiFlow from a macro.
The macro can select whether or not to leave an output stream
open by defining the symbol (within the controlling compound variable or code
segment) DisplayOnExit
and setting the value to true
or false, as
desired. If DisplayOnExit
is not defined, it is assumed to be true.
10.1.3.12 Deleting existing streams
To automatically delete an existing output stream at the
point when the first image is written to the new stream, the stream modifier _Options.DeleteExisting
should be added to the output stream name and set to true, viz:
stream_Options.DeleteExisting := true;
10.1.4
Chaining responses
As with interactive use of DigiFlow, dfc code may be used to build complex
processes by chaining together simpler processes. The mechanism beneath this is
a simple extension of the basic interface between dfc code and the various menu-driven
processes. Whereas the example given in the previous sections had a single
input specified by a file name, here we shall have a single input specified by
a compound variable.
For example, if we wish to use the facility for transforming
intensity (Tools: Transform: Intensity, see §5.7.2)
as the input to a time average, then we could construct a dfc code:
dlgTrans.Input := "Test.dfm";
dlgTrans.Code := "sqrt(P)";
dlgTrans.process := "Tools_TransformIntensity";
dlgAve.Input := dlgTrans;
dlgAve.Output := "ave.pic";
dlgAve.Kind := "Arithmetic";
dlgAve.process := "Analyse_TimeAverage";
process dlgAve;
Here, we first constructed a compound variable for Tools: Transform Intensity,
but do not set a destination for its output. We then assign this compound
variable to the input of the averaging process. Obviously this same code could
be written more directly without constructing the intermediate dlgTrans
variable:
dlgAve.Input.Input := "Test.dfm";
dlgAve.Input.Code := "sqrt(P)";
dlgAve.Input.process := "Tools_TransformIntensity";
dlgAve.Output := "ave.pic";
dlgAve.Kind := "Arithmetic";
dlgAve.process := "Analyse_TimeAverage";
process dlgAve;
10.1.5
Multiple output streams
If a process, which you wish to use to provide input to a
second process, produces more than one output stream, then it is necessary to
select which output stream you require. This is achieved by specifying .pipe in the
compound variable used for the input. The example below selects the YGradient output from
the synthetic schlieren process, and averages this over time.
dlgAve := =
Input := =
Experiment := "Expt.dfm";
Background := "Reference.dfi";
Difference := "Absolute";
CameraToTexture := 4.0;
ExperimentToTexture := 0.3;
ExperimentThickness := 0.2;
Medium := "Water";
CoordSystem := "internal waves";
GradientScale := 0.1;
DisplacementScale := 0.1;
DensityScale := 1.00000;
AutomaticInterrogation := true;
AutomaticValidation := true;
AutomaticMeans := true;
process := "Analyse_SyntheticSchlierenPatternMatch";
pipe := "YGradient";
?
Output := "ave.pic";
Kind := "Arithmetic";
process :=
"Analyse_TimeAverage";
?;
process Analyse_TimeAverage(dlgAve);
10.1.6
Accessing dialogs
Sometimes it is convenient to accept user input via one of
the standard process dialogs, then modify this before executing the process.
This may be achieved using the dialog statement either as:
dlg_value := dialog dlg;
or
dlg_value := dialog command;
In the first of these, dlg is
a compound variable with one mandatory component, .process, to specify the process that is
being invoked. As with the process
command, the .process
component must be a string value. In the second option, command
is literal text for the name of the process. For example, the following two
code segments have the same effect:
dlg.process := "Analyse_TimeAverage";
dlg := dialog
dlg;
and
dlg := dialog
Analyse_TimeAverage;
In both the above examples the return value (here dlg) is a
compound variable that contains the responses, including details of any nested
(chained) dialogs. Note that it does not contain details of settings you have
not made and will not affect the process you have selected. For example, the
time averaging process returns
dlg.process := "Analyse_TimeAverage";
dlg.Input := "randr.dfm";
dlg.Input_Time.FromStep := 0;
dlg.Input_Time.ToStep := 20;
dlg.Input_Time.StepBy := 1;
dlg.Input_Time.FromTime := 0.0;
dlg.Input_Time.ToTime := 8.0;
dlg.Input_Time.TimeStep := 0.20;
dlg.Kind := "Arithmetic";
dlg.Output := "Average.pic";
Obviously, the details on the right-hand side will
vary, depending on the precise options selected by the user, and the base
variable (here dlg)
is determined by the left-hand side of the assignment expression. There is also
some redundancy in this information in that the time period is specified in
both steps and times. In such a case, the step specification has priority.
The following example takes the returned compound variable
from the time averaging process and modifies the time period for the average:
dlg := dialog Analyse_TimeAverage;
destroy_variable("dlg.Input_Time”);
dlg.Input_Time.FromTime := 0.0;
dlg.Input_Time.ToTime := 1.0;
ret := process
dlg;
If you wish to specify the initial values of the controls
within the dialog, then this may be achieved using the
dlg_value := dialog dlg;
form of the command. Any valid components in dlg will be used to initialise the corresponding controls
within the dialog.
The functions get_dialog_response(..) and set_dialog_response(..) may be used
to retrieve or set (respectively) the current default response for a given
dialog.
10.2
Recording user input
Constructing dfc
code to control a process from scratch can be time consuming and prone to
error, especially when working with the more complex DigiFlow processes. To
simplify matters, DigiFlow is able to record many aspects of interactive use,
and convert these to dfc
code.
Indeed, DigiFlow does this all the time, and records a log
of user responses in the file DlgResponses.log
in the directory the process was run from. This file will gradually grow with
time as it accumulates more and more of the users’ interactive activity. This
file may be deleted without any harmful effects.
Moreover, the Edit Dialog Responses menu item (see §5.2.9) provides direct access to the latest responses for
all process dialogs, and provides the ability to fire up the dialog to
determine the dfc
responses without initiating the process. Note, however, that the responses
displayed in Edit Dialog Responses is only the minimum set required for the
options selected in the dialog. For example, the various sifting options will
not be included in the response unless they were selected in the dialog. Figure
148 illustrates this point. Note that the
highlighted entry in figure 148b is included to
remove any pre-existing output file.
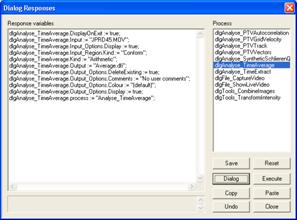
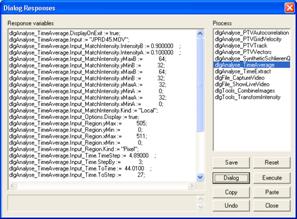 (a) (b)
(a) (b)
Figure 148:
Example of Edit Dialog Responses for the same process: (a) no sifting options
selected, and (b) sifting both time and space.
11
Plotting and drawing
Many of the features of DigiFlow produce graphical output.
Similarly, it is often desirable for a dfc file to plot the results of its
processing, or indeed for the user to plot data from a wide variety of external
sources. This section describes the features within DigiFlow that support this
process.
Before describing the commands controlling this process,
consider the following example.
hD := draw_start(width:=512,height:=512,
description:="Unspecified
DigiFlow drawing");
draw_group_begin(hD,name:="Velocity");
draw_begin_vector(hD,vectorScale:=10.0,autoWidth:=false);
100.0 100.0 2.0 2.0
300.0 300.0 -1.0 1.0
end_data;
draw_group_end(hD,name:="(group)" );
draw_end(hD);
hView := new_view(512,512);
view(hView,hD,erase:=true);
draw_destroy(hD);
Here, the drawing object, referred to by the handle hD, is created
by the call to draw_start(..). The draw_group_begin(..) draw_group_end(..) pair are
optional: they cause the graphics objects between to be grouped in any enhanced
metafile created from this drawing. Data is plotted by specifying it should be
drawn as vectors through the draw_begin_vector(..) command, then
the data is enumerated. As many data lines as desired may be included, the end
of the data being indicated by end_data; Completion of the drawing should be indicated
by draw_end(..). The drawing
object may then be rendered on the screen by first using new_view(..) to create the view window, then
calling draw_on_view(..) (or
equivalently a variant of the view(..)
command) to do the rendering. Finally, the drawing object may be destroyed using
draw_destroy(..) to free up
the associated memory.
11.1 Drawing
commands
There are two levels of drawing commands in DigiFlow. The
main group, all of which start with draw_, provide the most flexible,
versatile and powerful approach to creating graphs, plots, etc. However,
in some situations, a simpler interface is required. To this end a second set
of drawing functions is provided in DigiFlow, with names beginning plot_, which
effectively act as a simplified interface to the draw_ family. This section deals with
the draw_
family, whereas plot_
is dealt with in §11.3.
DigiFlow drawing commands may be subdivided into a number of
groups.
Drawing initialisation is provided by draw_start(..), which returns a handle for use in
all other drawing commands. Ultimately, after drawing all elements, draw_end(..) indicates the
drawing is ready for rendering, after which time draw_destroy(..) may be used to tidy up the memory
that was used. The rendering itself is achieved through one or more of draw_on_view(..), draw_on_file(..) and draw_on_emf(..). Note that
there is a variant of the view(..) function that
is directly equivalent to draw_on_view(..).
The axes for the drawing are set up using draw_set_axes(..), with the
labels and tick spacing specified with draw_x_axis(..) and draw_y_axis(..). Alternate axes, independent of the
coordinate system, may be specified with draw_bottom_axis(..), draw_top_axis(..), draw_left_axis(..) and draw_right_axis(..). All of these understand LaTeX-like
text formatting with fully licensed copies of DigiFlow; see §11.4 for details.
Basic drawing primitives include draw_move(..), draw_line(..), draw_lineto(..), draw_mark(..) and draw_vector(..). The block data equivalents of
these are draw_begin_line(..), draw_begin_lineto(..), draw_begin_mark(..) and draw_begin_vector(..), each block
being terminated by end_data.
In some cases it may be desirable to reduce the number of discrete points to be
plotted. This can be controlled for subsequent draw commands using draw_skip_points(..).
Additional drawing primatives include draw_arc(..), draw_circle(..), draw_rectangle(..) and draw_polygon(..).
The attributes applied to drawing primitives are set by draw_line_colour(..), draw_fill_colour(..), draw_no_fill(..), draw_line_width(..), draw_line_stye(..), draw_mark_type(..) and draw_mark_size(..). Note that
colours can be specified in a number of ways for draw_line_colour(..) and draw_fill_colour(..), including using colour names (e.g.
"black"
or "red"),
specifying the red, green and blue components, or as an index into the current
colour scheme (set by draw_colour_scheme(..)). Further
colour names can also be added using add_colour(..).
Text output is provided through draw_text(..) in conjunction with draw_font(..) and draw_text_colour(..). In addition,
draw_create_key(..) and draw_key_entry(..) provide a
convenient method of producing a legend for a plot. All of these understand LaTeX-like
formatting commands. See §11.4 for further details.
It is possible to place an image on the drawing with draw_image(..), setting the
colour scheme through draw_colour_scheme(..). An intensity
scale for the image (or other plotting feature) can be generated with draw_image_scale(..) for a
horizontal scale, or draw_image_scale_vertical(..) for one
oriented vertically. A scale can also be provided for vector elements using draw_vector_scale(..) and draw_vector_scale_vertical(..).
Grouping of drawing objects may be achieved with draw_group_begin(..) and draw_group_end(..), while plot
attributes may be localised with draw_save_state(..) and draw_restore_state(..). One drawing object may be embedded
within another using draw_embed_drawing(..), and the
clipping area may be customised with draw_clip_box(..).
Information about a specified drawing handle can be returned
to the calling dfc
code using draw_get_axes(..), draw_get_font_height(..) and draw_get_status(..).
For a more complete list, and further details on these
functions, refer to the dfc
function help facility within DigiFlow.
11.2
The DigiFlow Drawing format
The DigiFlow Drawing format (.dfd) represents a subset of the dfc dfc format that contains a mixture of
data representing DigiFlow results, and commands that allow DigiFlow to read
the data back in to form a plot. Typically, when DigiFlow produces a .dfd file, it will
also embed within it both time information, and documentation that records how
the file was created. This latter information is then available through the Edit: Properties
dialog described in §5.2.5.
A .dfd
file contains four types of lines: comment lines, which start with a hash () character; drawing
command lines (all valid commands start with draw_); data lines containing numeric
values, and macro lines. A macro line is a line that contains other dfc code. Such lines
should only be used to manipulate data for the drawing; they should have no
external or permanent effect on DigiFlow. Finally, a .dfd file can contain only a single
drawing object and must not attempt to display it (e.g. it must not call
view(..)). A .dfd file may be
specified at the Open Image dialog (§4.1, 5.1.1) or at the Run Code dialog (§5.1.2)
prompt. The converse, however, is not true.
DigiFlow can generate .dfd files in a number of ways. This
process is automatic if the output file name is given the .dfd extension (particularly suitable
for plots such as those from Analyse:
Time Summarise, §5.6.1.6) or using
the draw_on_file(..) function. To
aid interpretation by the user or user-written programs, .dfd files created by DigiFlow always
include keywords in the calls to the various drawing commands. Similarly,
DigiFlow-created .dfd
files do not contain macro lines.
The following illustrates a trivial .dfd file:
hDraw := draw_start(512,512);
draw_set_axes(hDraw,0,10,0,100);
draw_x_axis(hDraw,"$x$");
draw_y_axis(hDraw,"$y$");
draw_begin_marks(hDraw);
0 0
1 1
2 4
3 9
5 25
8 64
end_data;
draw_end(hDraw);
Note that if the .dfd file contains an error, then the
part of the drawing preceding the error will still be rendered, however no
error message will be generated. The .dfd code is run in its own (isolated) interpreter context
and can not access variables in any dfc code that may be causing the .dfd to be processed.
The output from a .dfd file, as with any drawing command, is rendered as an
Enhanced MetaFile which utilises vector graphics. It is therefore ideal for
incorporation in manuscripts and may readily be converted to PostScript. Figure
149 illustrates the output from the above trivial .dfd file.
Figure
149: Example of the
output from the trivial .dfd file given above.
All other dfc commands are prohibited unless encapsulated in brackets
and having no side effects other than returning a scalar numeric value.
11.3 Simple plot
The Simple Plot family of routines, which have names
beginning with plot_,
provides a simplified interface for producing basic graphs of data with a
minimum of commands. In the simplest case, a single command is all that is
necessary to produce a line plot or a plot showing individual data points.
Consider the following example:
x := x_index(100)/10.0;
y := x*(x-2);
plot_line(x,y);
The first two lines simply define a quadratic to be
plotted, and the final line takes the data in the x and y arrays and produces a line plot using
the default colour and style. Further lines may be plotted, either by making
the x and y arrays
multidimensional, or by repeated calls to the plot_line(..) function. The following two code
segments would produce the same results:
x := x_index(100,2)/10.0;
y[:,0] := x[:,0]*(x[:,0]-2);
y[:,1] := x[:,1];
plot_line(x,y);
or
x := x_index(100)/10.0;
y := x*(x-2);
plot_line(x,y);
y := x;
plot_line(x,y);
The limiting values for the axes are determined automatically
as the extremes in the specified data. However, these may be overridden by
calling plot_axes(..) giving the
desired limiting values. Similarly, the default titles for the axes may be
overridden by plot_titles(..).
If calling any of these plot functions directly from dfc code, then
DigiFlow will automatically display the plot by creating an appropriate view.
Subsequent calls to Simple Plot functions will cause that view to be updated.
If, however, the call is made within one of the menu options, then DigiFlow
will display the plot only when appropriate and not update it for each and
every call.
Many of the Simple Plot functions (which are implemented dfc macros to the draw_ series of
functions) have optional parameters to provide greater flexibility. For
example, the plot_line(..) function used
above includes an optional style parameter that can be used to select between
lines and points, and an optional colour parameter. Each of these may be
supplied either as a single value, or (when multiple sets of data are being
plotted simultaneously) as a list of values.
The Simple Plot family of functions includes:
|
plot(..)
|
Plots a series of points.
|
|
plot_line(..)
|
Plots a line.
|
|
plot_vectors(..)
|
Produce a vector map.
|
|
plot_image(..)
|
Add an image to a plot.
|
|
plot_fit(..)
|
Perform and plot a least squares fit.
|
|
plot_axes(..)
|
Explicitly specify the limits for the axes.
|
|
plot_axis_types(..)
|
Specify the types of axis (linear or logarithmic).
|
|
plot_titles(..)
|
Specify the titles for the axes.
|
|
plot_new(..)
|
Start a new plot.
|
|
plot_view_handle(..)
|
Return the handle for the view window displaying the plot.
|
|
plot_drawing(..)
|
Return a handle to the base plot. This does not include
information about the axes.
|
|
plot_update_view(..)
|
Cause the view to be updated.
|
Most of the Simple Plot family of functions return a handle
to the drawing that is being displayed. This handle may be passed to any of the
draw_ family
of functions to provide more advanced control over the appearance of the plot. The
reason for this is related to the manner in which the limits on the axes are
automatically determined.
If you wish to add details to a plot using the draw_ family and
wish this to be retained after subsequent calls to the Simple Plot functions,
then recover a handle to the base drawing using plot_drawing(..). (Alternatively, passing a null or the
integer value zero as the plot handle to many of the draw_ family will have the same effect.)
However, adding any further details to the plot using one of the simple plot
functions will cause this additional information to be discarded. Note the base
drawing does not have the limits for its axes set and so should not be viewed
directly. After modifying the drawing using the handle obtained from plot_drawing(..) you should
either call another of the Simple Plot family of functions or call plot_update_view(..).
11.4 Text
With fully licensed copies of DigiFlow, text added to
drawings and plots, whether via the draw_... or plot_... set of functions, understands
simple LaTeX-like formatting commands within the specified strings. For
example, the string "Dimensionless
height $\big(\frac{h}/{\alpha^2H_0}\big)$" if specified in draw_text(..) would produce
the label
.
Although DigiFlow does not understand the full range of
LaTeX commands and macros, it can interpret those most likely to be of use in
figures and graphs. The file DigiFlow_Latex.dfc
defines the majority of macros, using a set of more primitive macros built in
to DigiFlow’s LaTeX-like interpreter. Consult the dfc documentation on draw_install_latex_macro(..) for details
of how to define macros. The LaTeX interpretation may be turned off using draw_enable_latex(..).
Text size may be changed within a given string using the
LaTeX commands \tiny,
\small, \subscriptsize, \footnotesize, \normalsize, \large, \Large, \LARGE, \huge and \HUGE. However, it
is normally more convenient to change the size using draw_font(..) when outputting text through draw_text(..). On the other
hand, draw_font(..) does not
change the size of elements such as the labels and scale for the axes. The
command draw_set_base_scales(..) changes the
base scale for all text, and can thus be used to change the scale for axes, etc.
The LaTeX macros understood by DigiFlow are listed below.
_
^
\!
\#
\$
\%
\&
\,
\2dots
\:
\;
\Alpha
\BIG
\BIG
\Beta
\Big
\Big
\Chi
\Delta
\Downarrow
\Epsilon
\Eta
\Gamma
\HUGE
\HUGE
\Im
\Iota
\Kappa
\LARGE
\LARGE
\Lambda
\Large
\Large
\Leftarrow
\Leftrightarrow
\Mu
\Nu
\O
\Omega
\P
\Phi
\Pi
\Psi
\Re
\Rho
\Rightarrow
\S
\Sigma
\Tau
\Theta
\Uparrow
\Upsilon
\Varphi
\Varpi
\Xi
\Zeta
\\
\^
\_
\aleph
\alpha
\angle
\approx
\backslash
\bar
\bar
\beta
\bf
\bf
\big
\big
\bigsizes
\bullet
\calc
\cdot
\chi
\circ
\copyright
\cos
\cosh
\currentx
\currenty
\dagger
\ddagger
\dddot
\dddot
\ddot
\ddot
\delta
\div
\dot
\dot
\dots
\downarrow
\ell
\emdash
\endash
\epsilon
\equals
\equalsspace
\equiv
\eta
\euro
\exists
\exp
\footnotesize
\footnotesize
\forall
\frac
\frac
\gamma
\ge
\geq
\gg
\gotox
\gotox0
\gotoxy
\gotoxy0
\gotoy
\gotoy0
\hat
\hat
\huge
\huge
\hyphen
\in
\infty
\int
\iota
\it
\it
\kappa
\lambda
\langle
\large
\large
\lbrace
\lbrack
\le
\left
\left
\leftarrow
\leftrightarrow
\leftszbracket
\leq
\ll
\ln
\log
\mark
\mathbf
\mathbf
\mathit
\mathit
\mathrm
\mathrm
\mathsprime
\minus
\minusspace
\moveto
\mp
\mu
\nabla
\ne
\neq
\normalsize
\normalsize
\notin
\nu
\nudge
\o
\omega
\oplus
\oslash
\otimes
\overchar
\overcharoffset
\partial
\phantom
\phi
\pi
\plus
\plusspace
\pm
\pop
\popcalc
\pounds
\prime
\print
\prod
\propto
\psi
\push
\pushcalc
\qquad
\quad
\querybottom
\queryglyphbottom
\queryglyphheight
\queryglyphleft
\queryglyphright
\queryglyphtop
\queryglyphwidth
\queryheight
\queryheightline
\queryheighttotal
\queryleft
\queryright
\querytop
\querywidth
\querywidthline
\rangle
\rbrace
\rbrack
\rho
\right
\right
\rightarrow
\rightszbracket
\rm
\rm
\rmove
\rule
\scriptsize
\scriptsize
\sigma
\sim
\simeq
\sin
\sinh
\size
\sizeto
\small
\small
\sqrt
\sqrt
\subscript
\subscriptIt
\subset
\subseteq
\sum
\superscript
\superscriptIt
\supset
\supseteq
\surd
\tan
\tanh
\tau
\textbf
\textbf
\textit
\textit
\textnormal
\textnormal
\textrm
\textrm
\therefore
\theta
\tilde
\tilde
\times
\tiny
\tiny
\underline
\underline
\uparrow
\upsilon
\varphi
\varpi
\vcentre
\wedge
\widthheight
\wp
\xi
\yen
\zeta
\{
\}
\~
12 Image
file formats
In this section, some of the key image file formats
supported by DigiFlow are described.
Which image file is most appropriate depends in part on the
intended use of the final images, and in part on the amount of disk space
available. For all but the simplest processing operations, use of a ‘lossless’
integer image format (all industry standard formats are integer based, most
using 8-bit representations of the intensity) will introduce losses through the
quantisation of a floating point value into an integer domain. The .dfi format introduced
in DigiFlow (see §12.7) overcomes this problem by
storing the images in a floating point format (either 32 or 64 bit, although it
can also store as 8 bit); the cost is a greatly increased storage requirement.
In environments where DigiFlow is being used alongside DigImage,
use of the older DigImage formats (.pic and .mov)
is recommended to facilitate exchange of information between these two
applications. Indeed, the DigImage .mov format (now also known as .dfm) still plays a central role as the
initial format when capturing video from a supported camera (see §5.1.5.2).
When DigiFlow is used in conjunction with other image
processing packages, or with painting programmes, then use of standard formats
such as .bmp and
.tif is
recommended. With vector drawing packages, then the enhanced metafile format (.emf) is normally the
best option, although the older style Windows metafile format (.wmf) may also be used.
Note that a Matlab macro is available for reading uncompressed .dfi and .dfd files into
Matlab.
For incorporating images or graphics into documents, the
best results may be achieved with encapsulated PostScript (.eps), if your printer supports this. If
you do not use a PostScript printer, then use standard formats such as .bmp, .tif .jpg, .emf or .wmf.
12.1
Windows bitmap files (.bmp)
The .bmp
format is central to the design of Windows, and offers a universal but
inefficient standard for simple images. There are a number of variants of .bmp files, and
DigiFlow can read the most common variants (including 24-bit colour files).
DigiFlow will normally, however, only create 8-bit uncompressed files.
See standard Windows documentation for further details.
12.2 TIFF files
(.tif)
The Tagged Image Format File (TIFF) is one of the oldest
commonly used image formats. It offers great flexibility, but also great
difficulty as there are so many variants.
DigiFlow can read a wide variety of TIFF files using the
FreeImage library.
See standard TIFF documentation for further details.
12.3 GIF files (.gif)
For a long time, the .gif format was widely used, providing
an effective lossless compression for a broad variety of images. However, in
the late 1990s, Compuserve, who owned the intellectual property rights for the
GIF format, decided to charge a royalty. Since then, the use of GIF has
declined sharply, and many applications that once supported GIF no longer do
so. More recently the original patent on the GIF format expired, and DigiFlow
is again able to offer comprehensive support for GIF.
12.4
Enhanced metafiles (.emf)
Enhanced metafiles (.emf) are a standard Windows format,
intended primarily for vector graphics, but also supporting bit mapped images.
Most Windows-based packages support embedding and/or linking with these files
to provide graphical content. DigiFlow can both read and write .emf files, although
they should not normally be used as an image source.
12.5 Windows
metafiles (.wmf)
Windows metafiles (.wmf) are a standard Windows format, dating from the days
when Windows was only 16 bits. This format is intended primarily for vector
graphics, but also supports bit mapped images. Most Windows-based packages
support embedding and/or linking with these files to provide graphical content.
DigiFlow can both read and write .wmf
files, although they should not normally be used as an image source. In general
the newer Enhanced metafile format (.emf) should be used in preference (see §12.4).
12.6
Encapsulated PostScript (.eps)
Encapsulated PostScript is fundamentally an output format,
intended for inclusion in documents that will be printed using a PostScript
printer. DigiFlow does not provide the ability to read data from .eps files, although
may be able to use GhostScript to convert .eps into a format it can read (see §2.2.2). Encapsulated PostScript typically provides the
best quality output for a printed document and may be imported readily into
standard word processors and text formatting languages such as LaTeX.
12.7 DigiFlow floating point image format (.dfi)
The purpose of this format is to store image and related
data without significant loss of precision. Indeed for most elements of the
format, there are both four-byte and eight-byte floating point representations
as an option, in recognition that DigiFlow internally uses an eight byte
floating point representation, but often a four byte representation is
sufficient and is more compact. For compactness, a single-byte image format is
also available.
A tagged format is used to distinguish the different data
objects within the file, and the four and eight byte variants simply have
different tags. However, for the convenience of the user, DigiFlow uses a
single extension, .dfi,
for all of these, with the Options
button for the output stream allowing selection of the desired variant (32 or
64 bits). Additionally, the .dfi
format can store the image data in a single byte integer (8 bit) format.
Overall, the structure of the .dfi files may represented as
header
tag
object data
tag
object data
…
Each of these elements is described in turn below.
12.7.1
Header
The file header has been kept as simple as possible while
still conveying the essential data.
|
Field
|
Data type
|
Description
|
|
idFormat
|
Character(32)
|
Contains the text “Tagged floating point image file” (excluding
quotes). This is used by DigiFlow to identify the file type.
|
|
Version
|
Integer
(4)
|
Version number. Here must equal zero.
|
12.7.2
Tag
Each data object is preceded by a tag that indicates the
type of object and the size of the object.
|
Field
|
Data type
|
Description
|
|
DataType
|
Integer
(4)
|
The type of data contained in the ext object.
|
|
nBytes
|
Integer
(4)
|
The number of bytes of data used to represent the object.
|
Valid tags and the associated data objects are
described in the following subsections. Note that the quoted value is in
hexadecimal (base 16), as indicated by the hash (#) in front of the DataType value.
12.7.3 8 bit image
(DataType = #1001)
This data object contains an image using an eight-bit
(single byte) integer representation. Note nBytes = 8 + nx*ny.
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
c(0:nx-1,
0:ny-1)
|
Integer
(1)
|
The pixel intensities. The first index is across from left to
right, and the second is up from bottom to top. Storage in the file is
ordered c(0,0), c(1,0),…
|
12.7.4 8 bit multi-plane image (DataType = #11001)
This data object contains a multi-plane image using an
eight-bit (single-byte) integer representation. Note nBytes = 12 + nx*ny*nz.
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
nz
|
Integer
(4)
|
The number of pixel planes.
|
|
c(0:nx-1, 0:ny-1,0:nz-1)
|
Integer
(1)
|
The pixel intensities. The first index is across from left to
right, and the second is up from bottom to top. Storage in the file is
ordered c(0,0,0), r(1,0,0),…
|
12.7.5
Compressed 8 bit image (DataType = #12001)
This data object contains an image using an eight-bit
(single byte) integer representation compressed using ZLib. Note that nBytes varies depending on the efficiency of the
compression, and that nine different levels of compression are available
through the output options setting (see §4.4).
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
nz
|
Integer
(4)
|
The number of image planes.
|
|
szCompressed
|
Integer
(4)
|
The number of bytes of compressed data.
|
|
c(0:szCompressed-1)
|
Integer
(1)
|
The compressed pixel data. When reading an image, this should
be fed to the ZLib function uncompress
to recover the original image. When writing an image, the ZLib function compress(..) or compress2(..) should be
used.
|
12.7.6 32 bit
image (DataType = #1004)
This data object contains an image using a four-byte
floating point representation. Note nBytes = 8 + 4*nx*ny.
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
r(0:nx-1,
0:ny-1)
|
Real (4)
|
The pixel intensities. The first index is across from left to
right, and the second is up from bottom to top. Storage in the file is ordered
r(0,0), r(1,0),…
|
12.7.7 32 bit multi-plane image (DataType = #11004)
This data object contains a multi-plane image using a
four-byte floating point representation. Note nBytes = 12 + 4*nx*ny*nz.
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
nz
|
Integer
(4)
|
The number of pixel planes.
|
|
r(0:nx-1, 0:ny-1,0:nz-1)
|
Real (4)
|
The pixel intensities. The first index is across from left to
right, and the second is up from bottom to top. Storage in the file is
ordered r(0,0,0), r(1,0,0),…
|
12.7.8
Compressed 32 bit image (DataType = #12004)
This data object contains an image using an four-byte
floating point representation, compressed using ZLib. Note that nBytes varies depending on the efficiency of the compression,
and that nine different levels of compression are available through the output
options setting (see §4.4).
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
nz
|
Integer
(4)
|
The number of image planes.
|
|
szCompressed
|
Integer
(4)
|
The number of bytes of compressed data.
|
|
c(0:szCompressed-1)
|
Integer
(1)
|
The compressed pixel data. When reading an image, this should
be fed to the ZLib function uncompress(..) to recover
the original four-byte floating point image. When writing an image, the ZLib
function compress(..) or compress2(..) should be
used.
|
12.7.9 64 bit
image (DataType = #1008)
This data object contains an image using an eight-byte
floating point representation. Note nBytes = 8 + 8*nx*ny.
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
r(0:nx-1,
0:ny-1)
|
Real (8)
|
The pixel intensities. The first index is across from left to
right, and the second is up from bottom to top. Storage in the file is
ordered r(0,0), r(1,0),…
|
12.7.10 64 bit multi-plane image (DataType = #11008)
This data object contains a multi-plane image using a
eight-byte floating point representation. Note nBytes = 12 + 8*nx*ny*nz.
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
nz
|
Integer
(4)
|
The number of pixel planes.
|
|
r(0:nx-1, 0:ny-1,0:nz-1)
|
Real (8)
|
The pixel intensities. The first index is across from left to
right, and the second is up from bottom to top. Storage in the file is ordered
r(0,0,0), r(1,0,0),…
|
12.7.11
Compressed 64 bit image (DataType = #12008)
This data object contains an image using an eight-byte
floating point representation, compressed using ZLib. Note that nBytes varies depending on the efficiency of the
compression, and that nine different levels of compression are available
through the output options setting (see §4.4).
|
Field
|
Data type
|
Description
|
|
nx
|
Integer
(4)
|
The width of the image, in pixels.
|
|
ny
|
Integer
(4)
|
The height of the image, in pixels.
|
|
nz
|
Integer
(4)
|
The number of image planes.
|
|
szCompressed
|
Integer
(4)
|
The number of bytes of compressed data.
|
|
c(0:szCompressed-1)
|
Integer
(1)
|
The compressed pixel data. When reading an image, this should
be fed to the ZLib function uncompress
to recover the original eight-byte floating point image. When writing an
image, the ZLib function compress(..) or compress2(..) should be
used.
|
12.7.12 32 bit range (DataType = #1014)
This data object specifies the range of image values that
can be displayed. Note nBytes = 8.
This tag should be located after the image to which it applies.
|
Field
|
Data type
|
Description
|
|
rBlack
|
Real (4)
|
The intensity (value of r) that will
be displayed as “black”.
|
|
rWhite0
|
Real (4)
|
The intensity (value of r) that will
be displayed as “white”.
|
12.7.13 64 bit range (DataType = #1018)
This data object specifies the range of image values that
can be displayed. Note nBytes = 16.
This tag should be located after the image to which it applies.
|
Field
|
Data type
|
Description
|
|
rBlack
|
Real (8)
|
The intensity (value of r) that will
be displayed as “black”.
|
|
rWhite0
|
Real (8)
|
The intensity (value of r) that will
be displayed as “white”.
|
12.7.14 Rescale
image (DataType = #1100)
This data object requests that the image is rescaled after
being read in. Typically this is used to render a low resolution image to a
given size.
|
Field
|
Data type
|
Description
|
|
nxWant
|
Integer
(4)
|
The desired width after rescaling. Typically this is the width
of the original image prior to resampling and saving.
|
|
nyWant
|
Integer
(4)
|
The desired height after rescaling. Typically this is the
height of the original image prior to resampling and saving.
|
|
method
|
Integer
(4)
|
Method of rescaling image:
0 Constant
1 Bilinear
2 Bicubic
3 Natural spline
4 Cubic b-spline
5 Quintic b-spline.
|
12.7.15
Rescale image rectangle (DataType = #1101)
This data object requests that the image is rescaled after
being read in. Typically this is used to render a low resolution image to a
given size. In contrast with DataType #1100, this data object allows the input
image to coincide with a particular rectangle within the resultant image. This
feature is designed primarily to allow PIV velocity fields to be rescaled back
to the original size and location if saved in a compact format with vectors
only at the interrogation points.
|
Field
|
Data type
|
Description
|
|
nxWant
|
Integer
(4)
|
The desired width after rescaling. Typically this is the width
of the original image prior to resampling and saving.
|
|
nyWant
|
Integer
(4)
|
The desired height after rescaling. Typically this is the
height of the original image prior to resampling and saving.
|
|
method
|
Integer
(4)
|
Method of rescaling image:
0 Constant
1 Bilinear
2 Bicubic
3 Natural spline
4 Cubic b-spline
5 Quintic b-spline.
|
|
useRectangle
|
Integer
(4)
|
Indicates if Rectangle is to be used.
If zero (false), then the net effect of this tag is the same as for #1100.
|
|
Rectangle.xMin
|
Integer
(4)
|
The left side of the rescaled source image in the output
image.
|
|
Rectangle.yMin
|
Integer
(4)
|
The bottom of the rescaled source image in the output image.
|
|
Rectangle.xMax
|
Integer
(4)
|
The right side of the rescaled source image in the output
image.
|
|
Rectangle.yMax
|
Integer
(4)
|
The top of the rescaled source image in the output image.
|
12.7.16 Colour scheme (DataType = #2000)
This data object contains the colour scheme that the image
should be displayed with by default. Note that nBytes = 768.
This tag should be located after the image to which it applies.
|
Field
|
Data type
|
Description
|
|
red(0:255)
|
Integer
(1)
|
Defines the red component of the colour scheme to be used to
display the image.
|
|
green(0:255)
|
Integer (1)
|
Defines the green component of the colour scheme to be used to
display the image.
|
|
blue(0:255)
|
Integer
(1)
|
Defines the blue component of the colour scheme to be used to
display the image.
|
12.7.17 Colour scheme name (DataType = #2001)
This data object contains the name of a colour scheme. If
the name is recognised by DigiFlow, then the corresponding colour scheme will
be used. Note that nBytes is 64.
|
Field
|
Data type
|
Description
|
|
name
|
Character
(64)
|
The name of the colour scheme to be used.
|
12.7.18
Colour scheme name variable (DataType = #2002)
This data object contains the name of a colour scheme. If
the name is recognised by DigiFlow, then the corresponding colour scheme will
be used. Note that nBytes is 4 plus the length of the
name.
|
Field
|
Data type
|
Description
|
|
iLen
|
Integer
(4)
|
The length of the name string.
|
|
name
|
Character
(iLen)
|
The name of the colour scheme to be used.
|
12.7.19 Description (DataType = #3000)
This data object contains a 512 character description. Note nBytes = 512.
|
Field
|
Data type
|
Description
|
|
Descr
|
Character
(512)
|
A description.
|
12.7.20 User
comments (DataType = #3001)
This object contains user comments about the process that
created the file.
|
Field
|
Data type
|
Description
|
|
nBytes
|
Integer
(4)
|
The length of the description in bytes (characters).
|
|
Descr
|
Character
(nBytes)
|
The description.
|
12.7.21
Creating process (DataType = #3002)
This object contains information about the process that
created the file. Typically this is a copy of the dialog responses for the
controlling process.
|
Field
|
Data type
|
Description
|
|
nBytes
|
Integer
(4)
|
The length of the description in bytes (characters).
|
|
Descr
|
Character
(nBytes)
|
The description.
|
12.7.22 Creator details (DataType = #3003)
Records details of the creator. Note, nBytes = 304.
|
Field
|
Data type
|
Description
|
|
DigiFlow
|
Character
(32)
|
The DigiFlow version.
|
|
buildDate
|
Character
(16)
|
The build date.
|
|
licenceType
|
Character
(16)
|
The type of licence.
|
|
nameUser
|
Character
(32)
|
The name of the user.
|
|
nameComputer
|
Character
(32)
|
The name of the computer.
|
|
nameDomain
|
Character
(32)
|
The name of the Windows domain.
|
|
guidUser
|
Character
(32)
|
The user GUID.
|
|
macAddress(0:3)
|
4 lots of
Character (12)
|
Mac address of creating computer.
|
|
ipAddress(0:3)
|
4 lots of
Character (16)
|
IP address of creating computer.
|
12.7.23
Image time (DataType = #3018)
This data object contains time information. Note nBytes = 28.
|
Field
|
Data type
|
Description
|
|
iFrame
|
Integer
(4)
|
Ordinal position of the frame.
|
|
Reserved
|
Integer
(4)
|
Reserved.
|
|
Time
|
Real (8)
|
The time for the image.
|
|
tStep
|
Real (8)
|
The size of the time steps in the sequence the image belongs
to.
|
|
tFirst
|
Real (8)
|
The time for the first frame in the sequence (i.e. iFrame = 0)
|
12.7.24 Image coordinates (DataType = #4008)
This data object gives information on the coordinate system
if this is not a standard one.
|
Field
|
Data type
|
Description
|
|
Kind
|
Integer
(4)
|
The type of coorindates stored here:
0 None
1 Approximation to world
2 Custom
|
|
xWorldPerPixel
|
Real (8)
|
Number of world units per pixel.
|
|
yWorldPerPixel
|
Real (8)
|
Number of world units per pixel.
|
|
xOriginWorld
|
Real (8)
|
The world origin of the image.
|
|
yOriginWorld
|
Real (8)
|
The world origin of the image.
|
|
xUnits
|
Character
(16)
|
The name of the world units.
|
|
yUnits
|
Character
(16)
|
The name of the world units.
|
|
OriginalName
|
Character
(64)
|
The name of the coordinate system on which this was based. If
none, then “(none)”.
|
12.7.25 Image plane details (DataType = #4108)
This data object gives details of the contents of individual
image planes when there is more than one.
|
Field
|
Data type
|
Description
|
|
nPlanes
|
Integer
(4)
|
The number of planes of data contained in this field.
|
|
Contains0
|
Integer
(4)
|
Indicates the type of data in image plane 0:
#000 None
#001 Greyscale
#002 Red
#003 Green
#004 Blue
#101 xCoordinate
#102 yCoordinate
#103 zCoordinate
#201 xVector (u)
#202 yVector (v)
#203 zVector (w)
|
|
Descr0
|
Character
(32)
|
Text description or name for bit plane.
|
|
ParamA0
|
Real (8)
|
First parameter
|
|
ParamB0
|
Real (8)
|
Second parameter
|
|
ParamC0
|
Real (8)
|
Third parameter
|
|
ParamD0
|
Real (8)
|
Fourth parameter
|
|
Contains1
|
Integer
(4)
|
As for Contains0, but for second
image plane.
|
|
Descr1
|
Character
(32)
|
As for Descr0, but for second image
plane.
|
|
…
|
|
|
12.8 DigiFlow Particle tracking format
The format used for DigiFlow .dft particle tracking files shares some
elements in common with .dfi
files. Both use the same general tagged structure. However, while .dfi files are aimed
primarily at containing rasterised images, .dft files are designed to store
information about particles located in an image, ant the relationship between
these particles and the neighbouring images in a time sequence.
Further information on the format of these files is
available on request.
12.9 DigiFlow
pixel data format (.dfp)
The .dfp
format is a simple plain text format intended for direct use by other programs,
or to be imported into spreadsheets, etc. The first line contains the
width and height of the image (in pixels). Optionally, the number of data
planes can also be specified Subsequent lines each contain the pixel indices (i,j)
and a floating point representation of the intensity. For a simple image, with
only a single plane of data, the format is therefore
nx ny
i j pix_ij
i j pix_ij
…
With more than one plane of data, the format is
nx ny nz
i j pix_ij0 pix_ij1 … pix_ijk
i j pix_ij0 pix_ij1 … pix_ijk
…
This choice of format is motivated by providing a
compact, readable output for velocity fields, rgb full-colour images, etc.
For example, with an image containing both velocity and vorticity, the output
format would be
nx ny 3
i j u v vort
i j u v vort
…
while for a full colour image it would be
nx ny 3
i j red green blue
i j red green blue
…
When DigiFlow creates a .dfp file, it contains all the image
data, ordered from left to right, then from bottom to top. However, DigiFlow
does not care on the order of the pixel data when reading a .dfp file, and the file need not contain
all valid combinations of the pixel indices. Note that the first index gives
the column number (from 0 at the left to with-1 at the
right), while the second determines the row number (from 0 at the bottom, to height-1
at the top).
12.10 DigiFlow
drawing format (.dfd)
The DigiFlow drawing format (.dfp files) can store image as well as
vector graphic data. These files may be read as well as written, although they
are not recommended for simple raster images. For further information, refer to
the information on the format of these files in §11.2.
12.11
DigiFlow archive format (.dfa)
The DigiFlow archive file format (.dfa files) do not themselves store
images. Rather, they provide a container for information describing the
contents of a sequence of image files, and provide a way of specifying the
sequence.
If a .dfa
file is generated for a sequence of images image000.png, image001.png, … image732.png, then the name of the .dfa file will be image###.png.dfa. Note
that this name comprises the manner in which you would specify the sequence to
DigiFlow (image###.png)
but with the .dfa
appended.
The archive file itself contains dfc code specifying variables that
describe the image sequence. For example, generating the above image###.png sequence
using File: Edit Stream
would produce
File := "image###.png";
SelectorKind := 3;
IndexPtr := 5;
nDigits := 2;
FileType := 21;
nx := 512;
ny := 512;
nz := 1;
Time.LocateWith := 1;
Time.fFirst := 0;
Time.fLast := 732;
Time.tFirst := 0.0;
Time.tLast := 361.00000000000;
Time.tStep := 0.50000000000000;
Comments.UserComments := "No user comments";
Comments.CreatingProcess := {dlgFile_EditStream.DirectCopy :=
true;
dlgFile_EditStream.DisplayOnExit :=
true;
dlgFile_EditStream.Input := "JPRD45.MOV";
dlgFile_EditStream.Input_Options.Display :=
true;
dlgFile_EditStream.Input_Options.UseArchive := true;
dlgFile_EditStream.Input_Region.Kind :=
"All";
dlgFile_EditStream.Output := "junk##.png";
dlgFile_EditStream.Output_Options.DeleteExisting := true;
dlgFile_EditStream.Output_Options.Compression := 0;
dlgFile_EditStream.Output_Options.TrueColour := false;
dlgFile_EditStream.Output_Options.Colour :=
"(default)";
dlgFile_EditStream.Output_Options.Display :=
true;
dlgFile_EditStream.Output_Options.UseArchive := true;
dlgFile_EditStream.ReviewCapture :=
false;
dlgFile_EditStream.process := "File_EditStream";
};
Creator.DigiFlow := "DigiFlow v3.4.0 (ivf)";
Creator.Licence := "commercial";
Creator.UserName := "sd103";
Creator.ComputerName := "WETA";
Creator.UserDomain := "WETA";
Creator.UserNumber := "{…}";
Creator.MacAddress0 := "…";
Creator.MacAddress1 := "…";
Creator.MacAddress2 := "";
Creator.MacAddress3 := "";
Creator.IPAddress0 := "127.0.0.1";
Creator.IPAddress1 := "192.168.1.2";
Creator.IPAddress2 := "192.168.56.1";
Creator.IPAddress3 := "";
Coord.Kind := 0;
Coord.xWorldPerPixel := 0.0;
Coord.yWorldPerPixel := 0.0;
Coord.xOriginWorld := 0.0;
Coord.yOriginWorld := 0.0;
Coord.xUnits := "";
Coord.yUnits := "";
Coord.OriginalName := "";
Appearance.rBlack := 0.0;
Appearance.rWhite :=
1.00000000000000;
Appearance.LUT.Red:=[ 0.0000 …
1.0000 1.0000];
Appearance.LUT.Green:=[ 0.0000 … 0.9608
0.9804];
Appearance.LUT.Blue:=[ 0.0000 … 0.9608
0.9804];
Appearance.ColourScheme.Name := "(default)";
Appearance.DisplayAs := 1;
Appearance.TopDown :=false;
Resample.Kind := 0;
Note that some of the entries in the .dfa file above have been shortened or
removed (and replaced by an elpsis) to aid clarity. The details stored here
include what can be determined using read_image_details(..).
If you attempt to open a .dfa file using a function intended to
read an image, then the corresponding image or image stream will be opened (as
specified in the File
variable), but key details will be taken from the .dfa file.
12.12
DigImage raw format (.pic)
This format, developed originally for DigImage, is the
simplest supported by DigiFlow. It may be both read and written.
|
Field
|
Data type
|
Description
|
|
ni
|
Integer
(2)
|
Number of rows in the image.
|
|
nj
|
Integer
(2)
|
Number of columns in the image.
|
|
iPixel(0:nj-1,0:ni-1)
|
Byte (1)
|
Array of un-signed image intensities, ordered across (first
index) then down (second index) from the top left.
|
|
iOLUT
|
Integer
(2), optional
|
The DigImage output look up table giving the colour scheme.
|
|
Red(0:255)
|
Integer
(1), optional
|
Defines the red component of the colour scheme to be used to
display the image. This entry is optional if and only if nChannels = 1.
|
|
Green(0:255)
|
Integer
(1), optional
|
Defines the green component of the colour scheme to be used to
display the image. This entry is optional if and only if nChannels = 1.
|
|
Blue(0:255)
|
Integer
(1), optional
|
Defines the blue component of the colour scheme to be used to
display the image. This entry is optional if and only if nChannels = 1.
|
|
iw0
|
Integer
(2), optional
|
The location of the top of the window saved in the file.
|
|
iw1
|
Integer
(2), optional
|
The location of the bottom of the window saved in the file.
|
|
jw0
|
Integer
(2), optional
|
The location of the left of the window saved in the file.
|
|
jw1
|
Integer
(2), optional
|
The location of the right of the window saved in the file.
|
12.13
DigImage compressed format (.pic)
The compressed version of the DigImage file format was
developed to allow efficient compression using a hybrid adaptive run-length
encoding scheme based on individual bit planes. The degree of compression
achieved depends on the structure of the image. Although DigiFlow is able to
read these files, it does not provide a user interface to allow them to be
created.
Note that the image is stored top-down.
|
Bytes
|
Data type
|
Description
|
|
0-1
|
Integer
(2)
|
Always zero to distinguish from uncompressed format.
|
|
2-3
|
Integer
(2)
|
-nBitPlanes, indicating the number of bit planes stored in
the file.
|
|
4-5
|
Integer
(2)
|
The height of the image in pixels.
|
|
6-7
|
Integer
(2)
|
The width of the image in pixels.
|
|
5
|
Integer
(1)
|
Indicates the type of encoding used in
the following bytes:
Bit7 If set, then run-length
encode, otherwise bit-image encoding.
Bit6 If bit7=1, then bit6 set
indicates the length of the run is given by bits 0-4 in conjunction with the
following byte. If bit6 is clear, then the run length is given only by bits
0-4.
If bit7=0, then bit6
set indicates the number of BYTEs specified by a bit-image is given by bits
0-4 and the following byte; if clear and bit5 is set, then only bits 0-4 are
used to give the number of BYTES in the bit-image. However, if bit5 is clear,
then bits 0-4 are themselves a bit-image.
bit5 If bit7=1, then this bit indicates whether the
corresponding bit plane is set or clear in the run.
If bit7=0, then this bit indicates whether bits
0-4 are used as (part of) the length of the bit-image, or the bit-image
itself (clear).
bits0-4 Used in giving the length of the run length or
bit-image, or as part of the bit-image (bits 5,6&7 all clear).
|
|
6
|
Integer
(1)
|
If bit6 of byte4 is set, then this byte is used in specifying
the length of the run or bit-image.
If bit 6 of byte 4 is clear, then this is the first byte of
the encoding segment (if previous byte was run-length), or part of the
bit-image.
|
|
7
|
|
This could be part of the bit-image specified by bytes 5 &
6, or a new key code similar to 5, etc.
|
|
…
|
|
Repeat run-length and/or bit-image encoded segments, bit plane
by bit plane, until all image data has been processed.
|
|
|
Integer
(2)
|
iOLUT Optional specification of the
logical output look up table number within DigImage (not used by DigiFlow).
|
|
Red(0:255)
|
Integer
(1)
|
Defines the red component of the colour scheme to be used to
display the image.
|
|
Green(0:255)
|
Integer
(1)
|
Defines the green component of the colour scheme to be used to
display the image.
|
|
Blue(0:255)
|
Integer (1)
|
Defines the blue component of the colour scheme to be used to
display the image.
|
|
iw0
|
Integer
(2)
|
The top of the source window saved in this file.
|
|
iw1
|
Integer
(2)
|
The bottom of the source window saved in this file.
|
|
jw0
|
Integer
(2)
|
The left of the source window saved in this file.
|
|
jw1
|
Integer
(2)
|
The right of the source window saved in this file.
|
12.14
DigImage movie format(.mov or .dfm)
The DigImage movie format is of central importance for
sharing image sequences between DigiFlow and the earlier DigImage. It also
provides a computationally efficient medium for storing sequences of 8-bit
images of any resolution. The images are stored top-down, and the file header
contains an index of their location within the file.
C=
DigImage Movie Genearal Header Information =
C=
Size Name Description =
C=
8 FileOwner Contains the text "DigImage" =
C=
8 Version Contains the DigImage version =
C=
string. =
C=
4 iPtrHistoryHeader Points to the location of the =
C=
history header block. =
C=
16 FileType The type of file. Terminated by =
C=
<CR>. =
C=
220 Comments Comments, terminated by <FF>. =
C=
Not mapped on to iGeneralHeader. =
C=
History Header Information =
C=
4 iPtrPrivateHeader Points to the location of the =
C= header
for this file type =
C=
4 iDummy Unused. =
C=
8 CreatedBy The program which created the =
C=
file. Normally "DigImage". =
C=
8 Version The version of the program which =
C=
created the file. =
C=
16 CreatedUser The name of the user who created =
C= the
file =
C=
64 CreatedName The original name of the file =
C=
8 CreatedDate The date the file was created =
C=
8 CreatedTime The time at which the file was =
C=
created =
C=
16 ModifiedUser The name of the user who =
C=
modified the file =
C=
64 ModifiedName The name of the file when it was =
C=
last modified =
C=
8 ModifiedDate The date the file was last =
C=
modified =
C=
8 ModifiedTime The time the file was last =
C=
modified =
C=
40 UnUsed Additonal information. Not =
C=
currently assigned. =
C=
Movie Header Information =
C=
2 iFormatType Specifies the format of the =
C=
movie: =
C=
0 Raw bit image =
C=
1 Aligned raw bit image. =
C=
The movie frames are =
C=
aligned with nPixels/8 =
C=
byte boundaries, where =
C=
nPixels is the total =
C=
number of pixels in the =
C=
movie window. =
C=
2 iFrameRate Number of frames per second in =
C=
original input =
C=
4 iSampleSpacing The nominal spacing (in frames) =
C=
between images in the movie. =
C=
4 iMovieDuration The expected duration of the =
C=
movie (in original frames) =
C=
4 iPtrFrameTable Points to the start of the table =
C=
containing the frame data =
C=
4 nMovieFrames The number of movie frames in =
C=
the frame table. =
C=
2 iw0 The first row stored for the =
C=
image =
C=
2 iw1 The last row stored for the image=
C=
2 jw0 The first column stored for the =
C=
image =
C=
2 jw1 The last column stored for the =
C=
image =
C=
2 idi The step between sampled rows =
C=
2 jdj The step between sampled columns =
C=
4 nSize The size of the image (iw1- =
C=
iw0+1)*(jw1-jw0+1) =
C=
4 AspectRatio The aspect ratio of the pixels =
C=
in the image. =
C=
2 nBits The number of bit planes stored =
C=
256 iOLUTRed Red component of OLUT =
C=
256 iOLUTGreen Green component of OLUT =
C=
256 iOLUTBlue Blue component of OLUT =
C=
4 nFrameTableLength The number of bytes in the =
C=
frame table. =
C=
2 RecordAtFieldSpacing Indicates if the recording =
C=
sample spacing is determined by =
C=
iSampleSpacing or =
C=
dtSampleSpacing (if different). =
C=
4 dtSampleSpacing Nominal sample spacing (in =
C=
seconds). This is used in =
C=
priority to iSampleSpacing if =
C=
RecordAtFieldSpacing is .FALSE. =
C=
204 UnUsed Additional information, not =
C=
currently assigned. =
C=
Frame Table Information =
C=
4 iFrameNumber0 The first movie frame number =
C=
2 iLength The number of frames required =
C=
to process the movie during =
C= acquisition. =
C= 2 iDummy Unused =
C=
OBSOLETE 4 iPtrFrame0 Points to the first frame. =
C=
OBSOLETE 4 iPtrData0 Points to the additional data =
C=
OBSOLETE for the frame (0 if no =
C=
OBSOLETE additional data). =
C=
8 iPtrFrame0 Points to the first frame.
C=
4 iFrameNumber1 The second movie frame number =
C=
OBSOLETE 4 iPtrFrame1 Points to the second frame. =
C=
OBSOLETE 4 iPtrData1 Points to the additional data =
C=
OBSOLETE for the frame (0 if no =
C=
OBSOLETE additional data). =
C=
8 iPtrFrame1 Points to the second frame.
C=
.... =
C=
Note: DigImage limits the size of the frametable to 2048 =
C=
entries. In DigiFlow, this is extended to 32768 entries. =
C=
DigImage will only be able to access the first 2048 entries. =
13
Configuration files
As noted in §2, DigiFlow access
a number of start-up files in the program directory each time it is started.
The list below illustrates their use and the order in which they are called.
Note that there is information about which file is being executed that is
displayed in the status bar at the bottom of DigiFlow as it is started.
|
File
|
Usage
|
|
DigiFlow_GlobalData.dfc
|
Controls setup of root (global) interpreter
|
|
DigiFlow_dfcInstall.dfc
|
Installs dfc
functions located in DLLs rather than kernel
|
|
DigiFlow_Constants.dfc
|
Defines constants used by dfc code
|
|
DigiFlow_CheckLicence.dfc
|
Controls the checking of the licence for DigiFlow
|
|
DigiFlow_Licence.dfc
|
Contains the DigiFlow licence. This file differs for each
installation
|
|
DigiFlow_LocalData.dfc
|
Local customised data
|
|
DigiFlow_Plotting.dfc
|
Various plotting macros
|
|
DigiFlow_SimplePlot.dfc
|
The simple plot (plot_) functions
|
|
DigiFlow_Utilities.dfc
|
Utility macros
|
|
DigiFlow_Cameras.dfc
|
Details of supported cameras
|
|
DigiFlow_Dialogs.dfs
|
Status file restoring default dialog responses from last time
DigiFlow was run in directory
|
|
DigiFlow_Configuration.dfc
|
Controls configuration of DigiFlow
|
|
DigiFlow_Update.dfc
|
Controls the updating of DigiFlow
|
|
DigiFlow_7Z_Install.dfr
|
Responses for extracting DigiFlow from archive
|
|
DigiFlow_Registry.dfc
|
Handles DigiFlow registry settings
|
|
DigiFlow_dfcCommands.dfc
|
Contains main dfc documentation
|
|
DigiFlow_Changes.dfr
|
Contains information about recent changes
|
|
DigiFlow_General.dfr
|
Contains dfc
information for processes
|
|
DigiFlow_Latex.dfc
|
Defines LaTeX-like macros
|
|
DigiFlow_Status.dfs
|
Status file restoring settings from last time DigiFlow was run
in directory
|
Subsequently, the following files may also be used,
depending on the processing selected.
DigiFlow_Phrases.dfr
DigiFlow_Recipes.dfc
DigiFlow_SlaveProcess.dfc
Most of these files do not require modification by or
knowledge of the user. The following sections discuss those configuration files
that might require user customisation, or at least those that migh require a
user knowledge of their structure. Those files were highlighted in red in the
table above.
13.1
DigiFlow_Licence.dfc
The DigiFlow_Licence.dfc
file, located in the DigiFlow installation directory, contains the licence for
DigiFlow on one or more machines. This file is read and processed when DigiFlow
starts. If the file cannot be found, then DigiFlow will prompt the user to
create a LicenceRequest.dat
file. This file should be sent to Dalziel Research Partners in order that they
can generated a licence for your machine.
13.2
DigiFlow_LocalData.dfc
The standard distribution of DigiFlow does not include nor
create a DigiFlow_LocalData.dfc
file. Rather, this file is intended to contain user customisations that are not
overwritten by updating DigiFlow. (Note that a Site Licence server installation
of DigiFlow will create a DigiFlow_LocalData.dfc
on the server.) If the file is not detected, then default values will be used.
Similarly, default values will be used if a specific value is not specified in DigiFlow_LocalData.dfc.
The file may contain some or all of the following settings:
|
Variable
|
Type
|
Default
|
Comments
|
|
VideoCapture.UseCache
|
Logical
|
true
|
Causes DigiFlow to use a fixed cache file and undergo a review
process each time video sequences are captured.
|
|
VideoCapture.CacheFile
|
String
|
"V:\Cache\CaptureVideo.dfm"
|
The default file and path to be used for video capture.
|
|
VideoCapture.CameraBuffer
|
String
|
"(default)"
|
Selects the buffering mechanism for the cache file. One of "(default)",
"buffer",
"nobuffer",
"writethrough".
Changing this may improve the performance when writing the capture file on
some systems.
|
|
DigiFlowServer.Server
|
String
|
The server DigiFlow was installed from.
|
The server DigiFlow was installed from.
|
|
DigiFlowServer.Path
|
String
|
\\Server\DigiFlow$
|
The path (network share) where the server may be found.
|
|
DigiFlowServer.InstallDate
|
String
|
|
The date DigiFlow was installed on the server.
|
|
DigiFlowServer
.InstallTime
|
String
|
|
The time DigiFlow was installed on the server.
|
|
DigiFlowServer
.InstalledBy
|
String
|
|
The user-id of the person installing DigiFlow on the server.
|
|
DigiFlowServer
.UpdateDirectory
|
String
|
\\Server\DigiFlow$
|
The path DigiFlow is to check for updates.
|
|
DigiFlow.Update.Type
|
String
|
Dependent on licence type:
"manual" Free
"ftp" Commercial
"site" Site
|
Determines the location from which updates will be sought.
Must be "manual"
for free licences.
|
|
DigiFlow.Options.Bayer
.rGain
|
Real
|
1.0
|
The gain applied to the red channel when a Bayer filter is
used to determine a colour image from a single plane.
|
|
DigiFlow.Options.Bayer
.gGain
|
Real
|
1.5
|
The gain applied to the green channel when a Bayer filter is
used to determine a colour image from a single plane.
|
|
DigiFlow.Options.Bayer
.bGain
|
Real
|
1.0
|
The gain applied to the blue channel when a Bayer filter is
used to determine a colour image from a single plane.
|
|
DigiFlow.Options.Bayer
.Roll
|
Integer
|
1
|
Controls the phase of the colour information within the single
plane of pixels.
|
|
DigiFlow.Options.dfi
.useCompression
|
Logical
|
true
|
Indicates that compression should be used by default for dfi files.
|
|
DigiFlow.Options
.Display.dpi
|
Integer
|
96
|
Specifies the assumed display resolution. This overrides the /dpi:n command line switch.
|
|
DigiFlow.Options
.Display.Scaling
|
Real
|
1.0
|
Specifies the scaling applied to certain visual elements of
the user interface. This overrides the scaling implicitly calculated from the
/dpi:n command line switch.
|
13.3
DigiFlow_Cameras.dfc
DigiFlow requires details of the cameras it is going to use
as in many cases there is no mechanism for determining key information via the
camera interface. These details are supplied in the DigiFlow_Cameras.dfc file. This file
sets the CameraInfo
compound variable, that is stored in the global interpreter context, and
specifies both hardware details of the cameras that may be connected, and
preferences for their use. The table below summarises the entries, each of
which has the form CameraInfo.xxx.yyy, where xxx identifies the camera, and yyy
the specific configuration item. The camera identifier is related to the name
of its BitFlow framegrabber configuration file. It need not be the whole of the
file name, but it does need to be unique within DigiFlow_Cameras.dfc and follow normal dfc syntax (e.g.
it can not contain a hyphen character as this would be interpreted as minus).
|
Variable
|
Type
|
Comments
|
|
CameraInfo.xxx.CameraFile
|
String
|
Specifies the full name of the BitFlow configuration file.
|
|
CameraInfo.xxx.CameraName
|
String
|
A descriptive name for the camera.
|
|
CameraInfo.xxx.nChannels
|
Integer
|
The number of taps or channels feeding data from the camera to
framegrabber.
|
|
CameraInfo.xxx.fpsMin
|
Real
|
The lowest frame rate supported by the camera.
|
|
CameraInfo.xxx.fpsMax
|
Real
|
The highest frame rate supported by the camera.
|
|
CameraInfo.xxx.CanChangeExposure
|
Logical
|
Indicates that the exposure can be changed independently of
the frame rate.
|
|
CameraInfo.xxx.fpsDisplay
|
Real
|
The highest frame rate that should be used for displaying the
output on screen. Typically this should be less than or equal to the smaller
of 25 and CameraInfo.xxx.fpsMax.
|
|
CameraInfo.xxx.fpsKind
|
Integer
|
The method by which the number of frames per second can be
changed. Values are 0 for no change possible, 1 for change via a CameraLink
interface, and 2 for changes in the BitFlow CTab entry (typically for Dalsa
cameras).
|
|
CameraInfo.xxx.Untangle
|
Logical
|
Indicates processing is required to untangle the information
from the camera to generate a valid display.
|
|
CameraInfo.xxx.prefPreviewResolutionFactor
|
Integer
|
The scale factor that should be applied to the image when
previewing it on screen. For very high resolution cameras, a value greater
than 1 will reduce the size of the preview image, allowing more rapid display
and allowing the image to fit more comfortably on the screen (which may have
a much lower resolution). Note that the user can override this setting in the
dialog used to start the preview.
|
|
CameraInfo.xxx.prefPreviewProcessing
|
String
|
It is often desirable to have some form of processing on the
preview image. The default processing (which may be overridden by the user in
the dialog starting the preview) is specified by this string. Typical
examples include “particle
streaks” and “synthetic schlieren”.
|
|
CameraInfo.xxx.prefFpsDisplay
|
Real
|
The preferred display frames per second for the preview. This
may be overridden by the user in the dialog used to start the preview.
|
|
CameraInfo.xxx.nCaptureBuffers
|
Integer
|
The number of buffers to which the video is initially
captured. Typically 2 for an R3 framegrabber, or 8 for an R64-based card..
|
|
CameraInfo.xxx.nTotalBuffers
|
Integer
|
The number of buffers to be reserved for the camera. Typically
8 for an R3 framegrabber, or 16 for an R64-based card..
|
|
CameraInfo.xxx.nProcessThreads
|
Integer
|
The number of threads used to process the sequence being
captured prior to saving.
|
|
CameraInfo.xxx.nDisplayThreads
|
Integer
|
The number of threads used to display the sequence being
captured. Typically 1.
|
|
CameraInfo.xxx.fpsToInteger
|
Code
|
Converts the requested number of frames per second into an
integer value for internal use. For many cameras, the permissible number of
frames per second is restricted to be an integer fraction of the base frame
rate.
|
|
CameraInfo.xxx.fpsFromInteger
|
Code
|
Converts an integer (produced by fpsToInteger) back into a frame
rate.
|
|
CameraInfo.xxx.ReserveSpaceInFile
|
Logical
|
Causes extra space to be reserved in the Cache file.
|
|
CameraInfo.xxx.minReserveFramesInFile
|
Integer
|
If the cache file must be extended, then this will be the
minimum additional space reserved for future growth.
|
|
CameraInfo.xxx.SetGain
|
Code
|
Code used for suitable CameraLink cameras to set the gain.
|
|
CameraInfo.xxx.maxGain
|
Integer
|
The maximum gain for the camera.
|
|
CameraInfo.xxx.defaultGain
|
Integer
|
The default gain value for the camera.
|
|
CameraInfo.xxx.ShutterSpeed
|
Code
|
Code used for suitable CamerLink cameras to set the shutter
speed.
|
|
CameraInfo.xxx.minShutter
|
Integer
|
The minimum shutter speed for the camera.
|
|
CameraInfo.xxx.maxShutter
|
Integer
|
The maximum shutter speed for the camera.
|
|
CameraInfo.xxx.defaultShutter
|
Integer
|
The default shutter speed for the camera.
|
|
CameraInfo.xxx.AllowSerial
|
Logical
|
Enable serial communication over CamerLink connection.
|
|
CameraInfo.xxx.SerialLineFeed
|
Logical
|
Indicates that the CameraLink serial protocol requires line
feeds as well as carriage returns.
|
|
CameraInfo.xxx.SerialStatusQuery
|
String
|
The string that should be sent to the CameraLink camera to
query its status.
|
|
CameraInfo.xxx.SerialOnLineResponse
|
String
|
The first part of the response to the CameraLink status query
that, if received, indicates the camera is on line.
|
|
CameraInfo.xxx.SerialError
|
String
|
The response from a CameraLink camera that indicates an error
condition.
|
|
CameraInfo.xxx.SetupCode
|
String or Code
|
dfc
code that is run before starting the capture process to set up the camera.
|
|
CameraInfo.xxx.PostSetupCode
|
String or Code
|
dfc
code that is run after starting the capture process to set up the camera.
|
|
CameraInfo.xxx.SetFrameRate
|
String
|
dfc
code to alter the frame rate.
|
|
CameraInfo.xxx.minFrameRate
|
Integer
|
The minimum frame rate.
|
|
CameraInfo.xxx.maxFrameRate
|
Integer
|
The maximum frame rate.
|
|
CameraInfo.xxx.defaultFrameRate
|
Integer
|
The default frame rate.
|
|
CameraInfo.xxx.delayFrameStart
|
Integer
|
The number of pixels to delay that separates the start of the
image from the start of the frame sent by the camera.
|
|
CameraInfo.xxx.StrobeStart
|
Integer
|
This optional setting is used in conjunction with the BitFlow
framegrabber’s VSTROBE output signal (available via the 15 pin D connector).
Typical uses of this include controlling a strobe light, or driving a liquid
crystal shutter. Adjusting this value changes the phase of the start of the
VSTROBE pulse relative to the camera acquisition cycle.
|
|
CameraInfo.xxx.StrobeStop
|
Integer
|
As with CameraInfo.xxx.StrobeStart,
but sets the timing for the end of the VSTROBE pulse. Note that if StrobeStop
is less than StrobeStart
then VSTROBE is low only between the stop and the start.
|
|
CameraInfo.xxx.TriggerEventType
|
String
|
Indicates the type of event that is triggered.
|
|
CameraInfo.xxx.TriggerEventLine
|
Integer
|
The line within the image that the event is triggered at. Note
for R2 and R3 framegrabbers, this will typically be 4096 plus the scan line
number.
|
|
CameraInfo.xxx.TriggerEventMaxCount
|
Integer
|
Causes wrapping of the trigger event.
|
13.4
DigiFlow_Dialogs.dfs
This status file is stored in the directory from which
DigiFlow is started. It contains and localises information about the responses
used most recently in each of the main DigiFlow dialogs. The format of the
entries is that of dfc
calls to each of the DigiFlow facilities, with the name of the compound
variable being descriptive.
The DigiFlow_Dialogs.dfs
will only contain dialog entries for facilities that have been run for DigiFlow
started in the directory on this or a previous invocation. The following is an
example of this file. Note that the order of the entries is not fixed.
dlgFile_CaptureVideo.Output_Options.Colour := "(default)";
dlgFile_CaptureVideo.Output_Options.Display := 1;
dlgFile_CaptureVideo.Output := "CaptureVideo.dfm";
dlgFile_CaptureVideo.RegionName :=
"(all)";
dlgFile_CaptureVideo.Gain :=
0;
dlgFile_CaptureVideo.ShutterSpeed :=
0;
dlgFile_CaptureVideo.DisplayProcessDialog := 1;
dlgFile_CaptureVideo.DisplayProcessing :=
"(none)";
dlgFile_CaptureVideo.PreProcessFrame :=
"Default";
dlgFile_CaptureVideo.Time := 60.0000 ;
dlgFile_CaptureVideo.DisplayResolutionFactor := 3;
dlgFile_CaptureVideo.TimeMode := "Time";
dlgFile_CaptureVideo.DisplayDuringCapture := 1;
dlgFile_CaptureVideo.nSaveBits :=
8;
dlgFile_CaptureVideo.fpsDisplay :=
24.0000 ;
dlgFile_CaptureVideo.fpsShutter :=
30.0000 ;
dlgFile_CaptureVideo.fpsCapture :=
30.0000 ;
dlgFile_CaptureVideo.AcquireEqShutter :=
1;
dlgFile_CaptureVideo.DisplayOnExit :=
1;
dlgFile_CaptureVideo.process := "File_CaptureVideo";
LastResponse := "dlgFile_EditStream";
openImage.ChangeToHashes :=
1;
openImage.CompactList :=
1;
runCode.DefaultDir := "s:\users\stuart\img\digiflow\";
dlgFile_EditStream.Output_Options.DeleteExisting := 1;
dlgFile_EditStream.Output_Options.Resample := "none";
dlgFile_EditStream.Output_Options.Comments := "No user
comments";
dlgFile_EditStream.Output_Options.Colour :=
"(default)";
dlgFile_EditStream.Output_Options.Display := 1;
dlgFile_EditStream.Output := "junk####.dfi";
dlgFile_EditStream.DirectCopy :=
1;
dlgFile_EditStream.Input_Region.Kind :=
"All";
dlgFile_EditStream.Input_Options.Display :=
1;
dlgFile_EditStream.Input := "JPRD45.dfm";
dlgFile_EditStream.DisplayOnExit :=
1;
dlgFile_EditStream.process := "File_EditStream";
dfcConsole.LastOpen := "S:\Users\Stuart\Img\DigiFlow\StreamFunctionVorticity.dfc";
dfcConsole.LastSave := "S:\Users\Stuart\Img\DigiFlow\FunctionNames.dfc";
In addition to the compound dlg… variables, DigiFlow also stores
other user-interface related information in this file. In particular, LastResponse
indicates the last dialog to be activated. This value is used in the Edit
Dialog Responses facility described in §5.2.9. The openImage
compound variable records the current settings of the Open Image dialog (see §4.1), in particular how to handle numbered image
sequences.
Handling of dfc
files is controlled by runCode.DefaultDir,
which stores the current directory for File: Run Code (see §5.1.2), while dfcConsole stores information about the
last dfc files
to be opened or saved.
13.5
DigiFlow_Status.dfs
As with DigiFlow_Dialogs.dfs,
the DigiFlow_Status.dfs
stores localised status information in the directory in which DigiFlow was
started, restoring that saved previously each time it is started. However,
whereas DigiFlow_Dialogs.dfs
concentrates on data associated with the user interface, DigiFlow_Status.dfs stores information
concerning the internal state of DigiFlow such as colour shemes, coordinate
systems and region definitions.
The example below illustrates the structure of this file.
Note that this is again a dfc
file. However, for brevity, the contents have been shown truncated; truncations
are indicated by an ellipsis (…).
#S:\Users\Stuart\Img\DigiFlow\DigiFlow_Status.dfs
###### Begin
## Mon Apr 23 17:57:06 2007
#
#Colour Schemes
add_colour_scheme(scheme:="bipolar",
red:=[ 0.4980 0.4902 0.4824 0.4745 0.4667 0.4588 0.4510 …],
green:=[ 1.0000 0.9843 0.9686 0.9529 0.9373 0.9216 0.9059 …],
blue:=[ 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 …]);
add_colour_scheme(scheme:="schlieren",
red:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …],
green:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …],
blue:=[ 0.0000 0.0118 0.0235 0.0353 0.0471 0.0588 0.0706 …]);
add_colour_scheme(scheme:="single cycle -
double brightness",
red:=[ 0.5020 0.5176 0.5333 0.5490 0.5647 0.5804 0.5961 …],
green:=[ 0.5020 0.5020 0.5020 0.5020 0.5020 0.5020 0.5020 …],
blue:=[ 0.5020 0.5020 0.5020 0.5020 0.5020 0.5020 0.5020 …]);
add_colour_scheme(scheme:="single cycle -
aperture",
red:=[ 0.0000 0.0157 0.0314 0.0471 0.0627 0.0784 0.0941 …],
green:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …],
blue:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …]);
add_colour_scheme(scheme:="single cycle -
half brightness",
red:=[ 0.0000 0.0157 0.0314 0.0471 0.0627 0.0784 0.0941 …],
green:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …],
blue:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …]);
add_colour_scheme(scheme:="(default)",
red:=[ 0.0000 0.0314 0.0510 0.0902 0.1255 0.1569 0.1804 …],
green:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …],
blue:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …]);
add_colour_scheme(scheme:="single cycle",
red:=[ 0.0000 0.0314 0.0627 0.0941 0.1255 0.1569 0.1882 …],
green:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …],
blue:=[ 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 …]);
add_colour_scheme(scheme:="negative",
red:=[ 1.0000 0.9961 0.9922 0.9882 0.9843 0.9804 0.9765 …],
green:=[ 1.0000 0.9961 0.9922 0.9882 0.9843 0.9804 0.9765 …],
blue:=[ 1.0000 0.9961 0.9922 0.9882 0.9843 0.9804 0.9765 …]);
add_colour_scheme(scheme:="greyscale",
red:=[ 0.0000 0.0039 0.0078 0.0118 0.0157 0.0196 0.0235 …],
green:=[ 0.0000 0.0039 0.0078 0.0118 0.0157 0.0196 0.0235 …],
blue:=[ 0.0000 0.0039 0.0078 0.0118 0.0157 0.0196 0.0235 …]);
#
#Coordinate Systems
#Coordinate System: Tank
coord_system_create(name:="Tank",units:="mm");
coord_system_mapping(name:="Tank",mapping:="Linear: 1;x;y;");
coord_system_add_point(name:="Tank",xPixel:=155.0,yPixel:=385.0,
xWorld:=0.0,yWorld:=1.0);
coord_system_add_point(name:="Tank",xPixel:=551.0,yPixel:=104.0,
xWorld:=1.0,yWorld:=0.0);
coord_system_add_point(name:="Tank",xPixel:=165.0,yPixel:=111.0,
xWorld:=0.0,yWorld:=0.0);
#Set default coordinate system
coord_system_set_default(name:="Tank");
#
#Regions
#
#MatchIntensity
set_dfc_path(path:="s:\users\stuart\img\digiflow\;");
###### End
#S:\Users\Stuart\Img\DigiFlow\DigiFlow_Status.dfs
In this particular example, there are no regions and no Match Intensity
specifications set. The function set_dfc_path(..) specifies the path along which DigiFlow will search
for any dfc
files.
14 Extending
DigiFlow
DigiFlow is designed so as to allow users to extend its core
functionality in a number of ways. This section gives a brief introduction to
the facilities and techniques available.
14.1
Installing extensions
DigiFlow extensions are installed via a dfc interface.
add_image_reader(
add_image_reader(dll)
add_image_reader(dll,routine)
Adds a new image reader.
dll string
The name of the DLL file containing the image reader.
routine optional string (default “ReadImageDLL”)
The name of the function within the DLL that provides the required
functionality..
Return value None.
The following example (using Fortran 90 syntax) may be used
as the basis of a user-written reader. In this example, the image is provided
as ASCII values in a file, prefixed by the size of the image. If the function
fails, it should return Image_FileType_Unknown;
if it succeeds, it should return Image_FileType_DLL:
function
ReadImageDLL(Image,File,Options,Descriptor)
!DEC$
ATTRIBUTES DLLEXPORT, REFERENCE :: ReadImageDLL
!DEC$
ATTRIBUTES ALIAS:'ReadImageDLL' :: ReadImageDLL
!=====Modules
use
T_All
!=====Parameters
integer (4) ReadImageDLL
type (F_Image),
intent(inout) :: Image
character (*), intent(in) :: File
type (F_ImageOptions), intent(inout), optional :: Options
type (F_ImageDescriptor), intent(inout), optional :: Descriptor
!=====Local
variables
integer (4), automatic :: iFile,i,j,io,nx,ny
!=====Code
ReadImageDLL = Image_FileType_Unknown
call NewFileHandle(iFile)
open(iFile,file=File,status=’old’,form=’formatted’,err=99)
read(iFile,*,err=99)nx,ny ! Read image size
!
Create the image
call CreateImage(Image,nx=nx,ny=ny,AccessAs=Image_AccessAs_Real)
!
Read in the intensities
do
j=0,Image%Height-1
read(iFile,*,err=99)(Image%R2(i,j),i=0,nx-1)
enddo
!
Automatic scaling of intensities
Image%rBlack = minval(Image%R2)
Image%rWhite = maxval(Image%R2)
if
(present(Descriptor)) then
Descriptor%Time%iFrame = 999
Descriptor%Time%tNow = 999.0
Descriptor%Time%tStep = 0.1
Descriptor%Time%tFirst = 0.0
Descriptor%Comments%UserComments = 'This is a test'
Descriptor%Comments%CreatingProcess = 'Sample'
Endif
ReadImageDLL = Image_FileType_DLL
99
continue
close(iFile)
call FreeFileHandle(iFile)
return
end
Function
15
Miscellaneous publications
This section lists a small subset of the papers that have
been published using DigiFlow (or DigImage). The subset has been selected as
these papers showcases a new feature in or new application of the technology
within DigiFlow. This is by no means a complete list of publications in which DigiFlow
has been used, even by the authors of DigiFlow. For a complete list of the
latter, refer to http://www.damtp.cam.ac.uk/lab/people/sd103/papers/
Dalziel, S.B.
1992 Decay of rotating turbulence: some particle tracking experiments; Appl.
Scien. Res. 49, 217-244. [[pdf]]
Dalziel, S.B.
1993 Rayleigh-Taylor instability: experiments with image analysis; Dyn.
Atmos. Oceans, 20 127-153. [[pdf]]
Boubnov, B.M.,
Dalziel, S.B. & Linden, P.F. 1994 Source-sink turbulence in a stratified
fluid; J. Fluid Mech. 261, 273-303. [[pdf]]
Linden, P.F.,
Boubnov, B.M. & Dalziel, S.B. 1995 Source-sink turbulence in a rotating,
stratified fluid; J. Fluid Mech 298, 81-112. [[pdf]]
HackerS, J., Linden, P.F. & Dalziel, S.B. 1996 Mixing in
lock-release gravity currents; Dyn. Atmos. Oceans 24, 183-195. [[pdf]]
HolfordS, J.M. & Dalziel, S.B. 1996 Measurements of layer depth
in a two-layer flow; Appl. Scien. Res. 56, 191-207. [[pdf]]
CenedeseS, C. & Dalziel, S.B. 1998 Concentration and depth fields
determined by the light transmitted through a dyed solution; Proceedings of
the 8th International Symposium on Flow Visualization, ed. G.M. Carlomagno
& I. Grant. ISBN 0 9533991 0 9, paper 061. [[pdf]]
Dalziel, S.B.,
HughesS, G.O. & SutherlandP,
B.R. 1998 Synthetic schlieren; Proceedings of the 8th International
Symposium on Flow Visualization, ed. G.M. Carlomagno & I. Grant.
ISBN 0 9533991 0 9, paper 062. [[pdf]]
SutherlandP, B.R., Dalziel, S.B., HughesS, G.O.
& Linden, P.F. 1999 Visualisation and Measurement of internal waves by “synthetic
schlieren”. Part 1: Vertically oscillating cylinder; J. Fluid Mech. 390,
93-126. [[pdf]]
Dalziel, S.B.,
Linden, P.F. & Youngs, D.L. 1999 Self-similarity and internal structure of
turbulence induced by Rayleigh-Taylor instability; J. Fluid Mech. 399,
1-48. [[pdf]]
[[pdf]]J: (21) SutherlandP, B.R., HughesS, G.O., Dalziel, S.B. & Linden, P.F. 2000 Internal waves
revisited; Dyn. Atmos. Oceans. 31, 209-232.
Dalziel, S.B.,
HughesS, G.O. & SutherlandP,
B.R. 2000 Whole field density measurements by ‘synthetic schlieren’; Experiments
in Fluids 28, 322-335. [[pdf]]
LeppinenP, D.M. & Dalziel, S.B. 2001 A light attenuation
technique for void fraction measurement of microbubbles; Experiments in
Fluids 30, 214-220. [[pdf]]
RossS, A.N., Linden, P.F. & Dalziel, S.B. 2002 A study of
three-dimensional gravity currents on a uniform slope; J. Fluid Mech. 453,
239-261. [[pdf]]
Thomas, L.P.,
Marino, B.M. & Dalziel, S.B. 2003 Measurement of density distribution in a
fluid layer by light induced fluorescence in non-rectangular cross section
channels. Int. J. Heat & Tech. 21, 143-148. [[pdf]]
Thomas, L.P.,
Dalziel, S.B. & Marino, B.M. 2003 The structure of the head of an internal
gravity current determined by Particle Tracking Velocimetry. Expt Fluids.
34, 708-716. [[pdf]]
HigginsonS, R.C., Dalziel, S.B. & Linden, P.F. 2003 The drag on a
vertically moving grid of bars in a linearly stratified fluid. Expt. Fluids.
34, 678-686. [[pdf]]
MunroP, R.J., Dalziel S.B. & JehanS,
H. 2004 A pattern matching technique for measuring sediment displacement
levels. Expt. Fluids. 37, 399-408. [[pdf]]
ShinS, J.O., Dalziel, S.B. & Linden, P.F. 2004 Gravity
currents produced by lock exchange. J. Fluid Mech. 521, 1-34. [[pdf]]
Jacobs, J. &
Dalziel, S.B. 2005 Rayleigh-Taylor instability in complex stratifications. J.Fluid
Mech. 542, 251-279. [[pdf]]
MunroP, R.J. & Dalziel S.B. 2005 Attenuation technique for
measuring sediment displacement levels. Expt. Fluids 39, 602-613.
[[pdf]]
SveenP, J.K. & Dalziel, S.B. 2005 A dynamic masking technique
for combined measurements of PIV and Synthetic Schlieren applied to internal
gravity waves. Meas. Sci. Technol. 16, 1954-1960. [[pdf]]
RossS, A.N., Dalziel, S.B. & Linden, P.F. 2006 Gravity
currents on a cone. J. Fluid Mech. 565, 227-253. [[pdf]]
ScaseS, M.M. & Dalziel, S.B. 2006 An experimental study of the
bulk properties of vortex rings translating through a stratified fluid. Eur.
J. Mech. B/Fluids 25, 302-320. [[pdf]]
Dalziel, S.B.,
CarrP, M., SveenP, K.J. &
Davies, P.A. 2007 Simultaneous Synthetic Schlieren and PIV measurements for
internal solitary waves. Meas. Sci. Tech. 18, 533-547. [[pdf]]
HazewinkelS, J., BreevoortS, P. van, Maas, L.R.M., Doelman, A. & Dalziel, S.B. 2007 Equilibrium spectrum for internal wave
attractor in a trapezoidal basin. In Proceedings of the 5th International
Symposium on Environmental Hydraulics. [[pdf]]
HazewinkelS, J., BreevoortS, P. van, Dalziel,
S.B. & Maas 2008 L.R.M. Observations on the wave number spectrum and
evolution of an internal wave attractor in a two-dimensional domain. J.
Fluid Mech. 598, 81-105. [[pdf]]
Dalziel, S.B.,
PattersonP, M.D., Caulfield, C.P. & Coomaraswamy,
I.A. 2008 Mixing efficiency in high aspect-ratio Rayleigh-Taylor experiments. Phys.
Fluids 20, 065106. DOI:10.1063/1.2936311.
[[pdf]] [[web]]
MunroP, R.J., BethkeS, N. & Dalziel,
S.B. 2009 Sediment resuspension and erosion by vortex rings. Phys. Fluids.
21, 046601. [[pdf]]
IhleS, C.F., Dalziel, S.B. & Niño, Y. 2009 Simultaneous PIV
and synthetic schlieren measurements of an erupting thermal plume. Meas.
Sci. Tech. 20, 125402. [[pdf]]
HazewinkelS, J., TsimitriS, C., Maas, L.R.M. & Dalziel, S.B. 2010 Observations on the robustness of internal wave
attractors to perturbations. Phys. Fluids 22, 107102, doI:10.1063/1.3489008. [[pdf]] [[web]]
HazewinkelS, J., Maas, L.R.M. & Dalziel, S.B. 2011 Tomographic
reconstruction of internal wave patterns in a paraboloid. Exp. Fluids 50,
247-258. DOI:
10.1007/s00348-010-0909-x. [[pdf]]
[[web]]
HazewinkelS, J., GrisouardS, N. & Dalziel,
S.B. 2011 Comparison of laboratory and numerically observed scalar fields of an
internal wave attractor. Eur. J. Mech/B. 30, 51-56. DOI:10.1016/j.euromechflu.2010.06.007. [[web]]
Dalziel, S.B.,
PattersonP, M.D., Caulfield, C.P. & Le BrunS, S. 2011 The structure of low Froude number lee waves over
an isolated obstacle. J. Fluid Mech. 689, 3-31. doi:10.1017/jfm.2011.384.
[[pdf]] [[web]]
BethkeS, N. & Dalziel, S.B. 2011 Resuspension onset and crater
erosion by a vortex ring interacting with a particle layer. To appear in Phys.
Fluids.
See http://www.damtp.cam.ac.uk/lab/people/sd103/papers/
for a comprehensive list (including many with electronic copies) of papers
related to the techniques used by DigiFlow.
Dalziel, S.B. 1992 Decay of rotating turbulence: some particle
tracking experiments; Appl. Scien. Res. 49, 217-244.
Dalziel, S.B. 1993 Decay of rotating turbulence: some particle
tracking experiments; in Flow visualization and image analysis; Ed. Nieuwstadt,
Kluwer, Dordrecht, 27-54.
Dalziel, S.B. 1993 Rayleigh-Taylor instability: experiments with
image analysis; Dyn. Atmos. Oceans, 20 127-153.
Dalziel, S.B., Hughes, G.O. & Sutherland, B.R. 2000 Whole
field density measurements by ‘synthetic schlieren’; Experiments in Fluids
28, 322-335.
Monahan, J.J. 1992 Smoothed particle hydrodynamics. Ann. Rev.
Astrophys. 30, 543-574.
Sutherland, B.R., Dalziel, S.B., Hughes, G.O. & Linden, P.F.
1999 Visualisation and Measurement of internal waves by “synthetic schlieren”.
Part 1: Vertically oscillating cylinder; J. Fluid Mech. 390,
93-126.
3D view, 64
Accessing dialogs, 232
Accumulate images, 171
Aligning images, 169
Analyse
Ensemble mean, 84
Harmonic Analysis, 75
Time average, 71
Time extract, 79
Time series, 77
Analyse_DyeAttenuation,
86
Analyse_EnsembleMean,
84
Analyse_FollowOpticalFlow, 154
Analyse_PIV, 121
Analyse_PTVTrack, 131
Analyse_PTVVectors, 150
Analyse_ShowAsStreaks, 118
Analyse_SyntheticSchlierenInterpolative,
100
Analyse_SyntheticSchlierenPatternMatch, 105
Analyse_SyntheticSchlierenQualitative, 98
Analyse_TimeAverage, 71
Analyse_TimeExtract, 79
Analyse_TimeSummarise, 81
Appearance, 61
Archive file
input stream, 13, 225
output stream, 228
Array functions, 204
Array plotting functions, 212
Arrays, 185
as_thread(..), 66
Assignment, 185
Autocorrelation, 148
AutoHelp, 12
Average
Ensemble, 84
Time, 71
AVI files, 42
Bit depth of output stream, 229
BitFlow, 7
Bit-wise operations, 210
bmp
file format, 241
Break points, 200
Cache file, 8
Camera configuration, 7
Camera configuration - BitFlow, 7
Camera control, 210
camera_*, 33
Capture configuration, 8
Capture video, 36
Chaining responses, 230
Close, 46
Close all, 46
Code library, 31
Collection - definition, 13
Colour
output stream, 27
toggle, 64
Colour images, 20
Colour of output stream, 229
Colour scheme, 62
Combine images, 166
Command prompt, 9
Command prompt - commands, 9
Comments in output stream, 230
compile(), 193
Compound variables, 184
Compression of output stream, 229
Concentration power spectrum, 81
Configuration, 258
Configuration files, 257
Configuration functions, 217
Contouring images, 162
Coordinate functions, 210
Coordinate system wizard, 52
Coordinate systems, 50, 51, 52, 174
Coordinates
copy world system, 52
edit world system, 51
new world system, 50
transform to world, 174
world, 49
Copy, 47
as bitmap, 47
Cursor, 60
Data acquisition functions, 215
Data Translation, 1
Debugging, 196
Deleting existing output stream, 230
Depth of a gravity current, 80
dfa
file format, 251
dfc
run, 33
dfc code, 14
dfc Console, 201
dfc Help, 30
dfcConsole, 55
dfd
file format, 235, 251
dfi
file format, 242
dfm
file format, 255
dfp
file format, 251
dft
file format, 251
Dialog responses, 55, 233
Differential functions, 213
DigiFlow command files, 223
DigiFlow configuration, 3
DigiFlow_Cameras.dfc, 258
DigiFlow_Dialogs.dfs, 3, 262
DigiFlow_Licence.dfc, 257
DigiFlow_LocalData.dfc, 258
DigiFlow_Status.dfs, 3, 263
DigImage, 1
DirectDraw functions, 214
Displaying output stream, 228
Distance
measure, 60
Drawing, 234
Drawing commands, 234
Drawing file format, 235
Dye attenuation, 86
Dye concentration, 89, 90
Edit
dialog responses, 55
process again, 54
properties, 48
region, 54
world coordinates, 49
Edit dfc code, 55
Edit stream, 40
emf
file format, 241
Encapsulated PostScript, 4, 29, 43
Enlarge
zoom in, 58
zoom out, 58
Ensemble
Average, 84
eps, 29, 43
file format, 242
printer setup, 4
Error handling, 196
Eulerian, 131
execute statement, 192
Exit, 46
exit statement, 192
exit_digiflow, 46
exit_digiflow(), 192
Export AVI, 42
Export to simple EPS, 46
Extending DigiFlow, 265
Extract time series, 79
File handling functions, 206
File menu, 33
File_CaptureVideo(..), 36
File_EditStream, 40
File_ExportAVI, 42
File_MergeStreams, 41
File_ShowLiveVideo, 33
Filtering images, 162
First index, 28
First index for output stream, 229
Flow functions, 210
Folder for output stream, 228
Follow optical flow, 154
for statement, 192
Format
bmp, 241
dfa, 251
dfd, 235, 251
dfi, 242
dfm, 255
dfp, 251
dft, 251
emf, 241
eps, 242
gif, 241
image files, 241
mov, 255
output stream, 28
pic, 253, 254
tif, 241
wmf, 242
Fourier descriptors, 162
Fractal
box count, 163
Fractal dimension, 83
Frame grabber, 7
ftp functions, 214
Full colour
output stream, 28
function, 193
Functions, 203
all, 218
array, 204
array plotting, 212
basic mathematical, 204
configuration, 217
coordinate, 210
differential, 213
file handling, 206
flow, 210
image processing, 209
information, 205
logging, 216
miscellaneous, 217
numerical, 212
reading and writing images, 207
statistics, 208
string, 204
threads, 213
timing, 208
type manipulation, 205
variables, 206
windows and views, 207
GhostScript functions, 215
gif
file format, 241
Grid PTV velocity, 151
Help, 12
History, 1
if statement, 191
Image
open, 17, 33
properties, 48
save, 21, 33
Image file formats, 241
Image processing functions, 209
Image selectors, 13
Images streams, 13
include(..), 196
Information functions, 205
Input
from file, 196
Input stream
archive file, 13, 225
colour component, 225
control in macro file, 224
displaying, 225
folder for, 224
match intensity, 25
matching intensity, 227
region, 23, 226
selecting times, 226
sifting, 22
timing, 22
waiting for, 228
Installation, 3
Intensity
transform, 158
transform recipe, 157
Key features, 2
Lagrangian, 131
LaTeX, 15, 30, 43
LaTeX macros, 238
Leaving output stream visible, 230
Library, 31
Lists, 188
Live video
particle streaks, 35
synthetic schlieren, 35
Live view, 33
Local data, 258
Logging functions, 216
Macro files, 223
Macros, 14, 223
accessing dialogs, 232
chaining responses, 230
control of input streams, 224
control of output stream, 228
multiple output streams, 231
make_array(..), 185
make_like(..), 185
make_list(..), 188
Match intensity, 25, 227
Matching algorithm, 133
Mathematical functions, 204
MatLab, 2
Mean
Ensemble, 84
Time, 71
Measure distance, 60
Merge streams, 41
mf
file format, 242
mod, 190
mov
file format, 255
Move image, 61
Multiple output streams, 231
Numerical functions, 212
Objective function, 133
Open image, 17, 33, 46
Operators, 189
mod, 190
Optical flow, 153
follow, 154
Follow, 154
Options
output stream, 27
Output stream
archive file, 228
bit depth, 229
colour, 27, 229
comments, 230
compression, 229
controlling, 228
deleting existing stream, 230
displaying, 228
file format, 28
first index, 28, 229
folder for, 228
full colour, 28
leaving visible, 230
multiple, 231
options, 27
quality, 230
resampling, 28, 230
user comments, 29
Particle Image Velocimetry (PIV), 121
Particle streaks, 118
live video, 35
Particle tracking functions, 216
Particle Tracking Velocimetry (PTV), 131
Particles
streaks, 118
pic
file format - compressed, 254
file format - raw, 253
PIV data
example of post-processing, 164
Plot, 237
Plotting, 234
PostScript, 215
PostScript driver, 5
Printing, 43
process, 223
Process again, 54
psfrag, 30, 43
PTVAutocorrelation, 148
PTVBasic statistics, 147
PTVGridVelocity, 151
Quality of output stream, 230
Queries, 200
quit statement, 192
Reading and writing images, 207
Recording user input, 233
Redo process, 54
Region, 226
edit, 54
input stream, 23
naming, 24
Registry, 7
Registry functions, 217
Resampling, 28
Resampling output stream, 230
Rescaling an image, 161
Run code, 33
Running processes, 223
Save image, 21, 33
Security, 7
Selectors, 13
Sequence - definition, 13
Serial communications, 215
Setup video, 39
Show where, 60
Sifting, 14
input stream, 22
Sifting data, 89
Simple plot, 237
Slave process, 34, 172
Slaves, 64
Starting DigiFlow, 9
Statements
exit_digiflow, 46
Statistical functions, 208
Status files, 3
Streaks, 118
String functions, 204
Summarise time series, 81
Synthetic schlieren, 108
live video, 35
process, 100, 105
qualitative, 98
Synthetic Schlieren, 95
Text output, 15
Thread functions, 213
Threads, 14
run code as thread, 66
tif
file format, 241
Time
Average, 71
Mean, 71
Time average, 71
Time extract, 79
Time series, 77
Time summarise, 81
Timing
input stream, 22
Timing functions, 208
Toggle colour, 64
Tools_CombineImages, 166
Tools_TransformIntensity, 158
Tools_TransformRecipe, 157
Tools_TransformToWorld, 174
Tracing execution, 200
Transform
intensity, 158
recipe, 157
to world coordinates, 174
Transportation algorithm, 133
try_execute statement, 192
Type manipulation functions, 205
Type query functions, 185
User comments, 29
User functions
definition, 193
User input, 195
User output, 195
Variable functions, 206
Vector scale, 61
Velocities
PIV, 121
PTV, 131
PTV - autocorrelation, 148
PTV – basic statistics, 147
PTV - grid, 151
PTV - vectors, 150
Show as streaks, 118
Velocity fluctuations, 170
Velocity statistics, 147
Velocity vectors – PTV, 150
Video
capture, 36
live, 33
setup, 39
View
3D, 64
appearance, 61
close, 46
close all, 46
colour scheme, 62
slaves, 64
toggle colour, 64
vector scale, 61
zoom, 58
View variables, 197
view_variables(..), 197
Waiting for input streams, 228
Web browsing, 214
while statement, 191
Wild cards, 20
Window and view functions, 207
World coordinates, 49
Z - objective function, 133
ZLib, 245
Zoom
all full size, 59
all half size, 59
all one third size, 59
all quarter size, 59
custom, 58
Fit window to, 60
full size, 58
in, 58
to window, 59
Zoom out, 58
16 Licence
Agreement
DigiFlow
Licence Agreement
Dalziel Research
Parnters,
142 Cottenham Road, Histon, Cambridge CB4 9ET, England
1. Agreement. Installation of part or all of the
software suite known as DigiFlow, or any system derived from DigiFlow, is
deemed to indicate agreement with the terms and conditions of this licence.
2. Parties. This agreement is between Dalziel Research
Partners, the software Developer and copyright holder, and the person, company
or institution installing or using the software, the Customer.
3. Definition. DigiFlow comprises the DigiFlow
executable files, support files, documentation files, configuration files, and
other utilities supplied with the system, and the source code, object code,
libraries and documentation associated with or supplied with the system.
4. Types of Licence. Two types of licence are available
for DigiFlow. A Free Licence has restricted functionality and more limited
support. A Commercial Licence provides access to all of DigiFlow’s features and
has a broader level of support.
5. Right of use. The Developer hereby grants the
Customer, a non-transferable and nonexclusive licence to use DigiFlow on a
single microcomputers within the premises of the Customer. The software may be
transferred to a different microcomputer, with the Customer's premises, only after
it has been removed completely from any machine on which it was installed
previously.
6. Licence Key. The Licence Key is the numeric code
that controls the use of DigiFlow on a given computer. The Licence Key is
unique to the network adapter(s) on the licensed computer. The Customer must
inform the Developer if they wish to transfer DigiFlow from one computer to
another, or if the network card is changed or removed. The Developer will then
issue a new Licence Key for the new computer.
7. Use off site. DigiFlow, or any software developed
using the DigiFlow Development System, may not be used outside the premises of
the Customer without the express prior written consent from the Developer. The
exception to this rule is that use during brief field studies (lasting no more
than four weeks in a twelve month period), for demonstration and presentation
purposes is permitted.
8. Revocation. The Developer reserves the right to
revoke the Licence if the Customer fails to meet any of the terms under which
the software is supplied.
9. Copyright. The copyright of DigiFlow, and all its
components and manuals, is owned by the Developer. Copyright of certain third
party open source libraries used by DigiFlow remains with the developers of
those libraries. Copies of the software and documentation may be made for
backup purposes. Additionally, copies may be made of the manuals for the
purposes of training and use of DigiFlow provided such copies retain
their original copyright declaration.
10. Reverse engineering. The Customer may not
decompile, disassemble or otherwise reverse engineer any component of DigiFlow.
Further, the customer must not attempt to break, bypass or disable the licence
key system controlling the use of DigiFlow.
11. Transfer of Ownership. The Customer may not sell
DigiFlow or any code developed under the Development System without prior
consent from the Distributor. The customer may, however, distribute images
processed by DigiFlow and DigiFlow dfc macro code without restriction.
12. Other Copies. All the terms of this licence apply
equally to the original supplied version of DigiFlow, to any upgrades or
updates to the DigiFlow or subsequent systems derived from DigiFlow,
or documentation which may be supplied from time to time by the Distributor, and
to any copies made of DigiFlow or its updates under the terms of this
licence.
13. Limited Warranty. The Developer guarantees holders
of Commercial Licences that DigiFlow will perform substantially in
accordance with the accompanying documentation. No such guarantee exists for
holders of Free Licences. The Developer disclaims all other warranties either
express or implied.
14. Period. The period for the stated and any implied
warranty is limited to 90 days from receipt of a Commercial Licence for DigiFlow.
Updates or upgrades to DigiFlow outside this period carry no warranty.
15. Consequential Damages. Neither the Developer nor
their suppliers shall not be liable for any damages whatsoever arising out of
the use, misuse or inability to use DigiFlow or any updates or upgrades to this
system.
16. Support. User support for holders of Commercial
Licences will be provided by the Developer free of charge for the first year
following receipt of the System. This support will normally consist of a
combination of electronic, written and verbal communication. On-site training
is not included. The Developer reserves the right to alter the precise nature
and scope of this support. Support for users with Free Licences is at the discretion
of the Developer.
17. Upgrades. The Developer undertakes to make
available, free of charge, any upgrades or updates to DigiFlow released by the
Developer during the first year after the receipt of a Commercial Licence, provided
the appropriate licence fee has been paid. This undertaking does not imply that
Developer is obligated to modify DigiFlow in any way, or release any
modifications made to DigiFlow.
18. Expiration. Licence Keys are perpetual for the
version of DigiFlow for which they were issued. The Developer, however,
reserves the right to change the licence key mechanism in future versions of
DigiFlow in a way that may render invalid Licence Keys from earlier versions.
In such cases, Holders of Commercial Licences within their upgrade period will
be entitled to a new Licence Key. The Developer also reserves the right to
discontinue the issue of Free Licences.